基于多轴联动的包装机用刀封装置的制作方法
本发明涉及包装机械,更具体地说涉及一种基于多轴联动的包装机用刀封装置。
背景技术:
1、刀封装置是包装机机械领域中用于对包装袋或包装膜进行热封或热封切断的封口装置,如在枕式包装机中,连续输入的包装膜经膜成型器包裹在物料上,通过纵封机构将包装膜的两侧边重叠封合在一起,然后通过刀封装置将相邻物料之间的包装膜进行封口并切断,形成单个的包装成品,或者是封口不完全切断,在设定数量的连包之后再进行封口切断,形成连包产品。
2、现有的刀封装置一般包括上热封刀组件和下热封刀组件,通过热封驱动机构驱动上热封刀组件和下热封刀组件相对啮合实现对从上热封刀组件和下热封刀组件之间穿过的包装膜进行热封和封切的操作。
3、当包装膜材质较厚时需要较长的热封时间时,一般还会给上热封刀组件和下热封刀组件增加一个沿包装膜输送方向的往复运动的驱动机构,以确保在不影响包装效率的前提下,尽量增加上热封刀组件和下热封刀组件对包装膜的热封时间,以达到预期的热封效果。
4、而根据被包装物料的高度变化和膜宽度的变化,对于上热封刀组件和下热封刀组件啮合位置的高度也需要进行调整,即会增加一个调整上热封刀组件和下热封刀组件啮合高度的调节机构,以适配物料规格和包装膜规格的变换。
5、如授权公告号为cn219565716u,授权公告日为2023年8月22日,名称为“一种往复式横封装置”的实用新型专利授权公告文本,该实用新型包括安装板、安装架、横封机构和往复驱动机构,横封机构安装于安装架,安装架可活动地安装于安装板,往复驱动机构安装于安装板且与安装架相配合;往复驱动机构包括第一伺服驱动件、第一连杆、第二连杆、滑块和直线导轨,第一伺服驱动件、直线导轨固定安装有安装板,第一伺服驱动件的驱动端与第一连杆的第一端铰接,第一连杆的第二端与第二连杆的第一端铰接,第二连杆的第二端与安装架铰接,直线导轨为一对且分别位于安装架的两侧,滑块安装于安装架且与直线导轨滑动配合。
6、现有的刀封装置往往采用复杂的机架结构,传动部件较多,导致刀封装置的有效负载率较低,刀封装置装配难度大,装配效率低;同时,往复驱动机构带动安装架整体往复移动,运动惯量较大,响应较慢,整个刀封装置运动过程产生的振动和噪音也较大;横封机构和往复驱动机构在实际运行中均存在误差,二者配合时其误差则累计在一起,导致刀封装置的精度较低。
技术实现思路
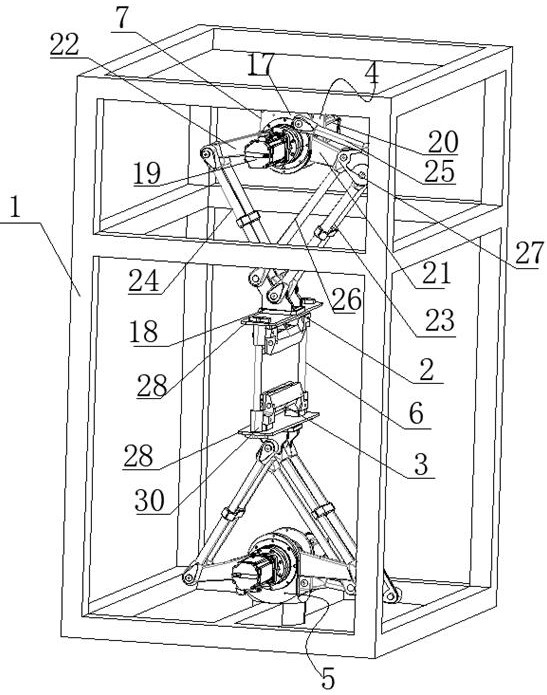
1、为了克服上述现有技术中存在的缺陷和不足,本发明提供了一种基于多轴联动的包装机用刀封装置,本发明的发明目的在于解决现有刀封装置有效负载率低、响应慢、精度低的问题。本发明包括刀封框架、上热刀封组件、下热刀封组件;上热刀封组件通过第一多轴联动驱动机构装配在刀封框架上,下热刀封组件通过第二多轴联动驱动机构装配在刀封框架上,所述第一多轴联动驱动机构带动上热刀封组件在设定平面内运动,产生两个平面自由度;所述第二多轴联动驱动机构带动下热刀封组件在所述设定平面内运动,产生两个平面自由度;第一多轴联动驱动机构与第二多轴联动驱动机构配合,实现上热刀封组件和下热刀封组件的啮合。本发明采用两组多轴联动驱动机构分别驱动上热刀封组件和下热刀封组件,简化了刀封装置的机架结构和传动部件,提高了刀封装置的有效负载率,多轴联动驱动机构直接作用在热刀封组件上,热封动作响应更高效,减少了机构之间的误差累积,精度更高。
2、为了解决上述现有技术中存在的问题,本发明是通过下述技术方案实现的。
3、本发明提供了一种基于多轴联动的包装机用刀封装置,包括刀封框架、上热刀封组件、下热刀封组件;上热刀封组件通过第一多轴联动驱动机构装配在刀封框架上,下热刀封组件通过第二多轴联动驱动机构装配在刀封框架上,所述第一多轴联动驱动机构带动上热刀封组件在设定平面内运动,产生两个平面自由度;所述第二多轴联动驱动机构带动下热刀封组件在所述设定平面内运动,产生两个平面自由度;第一多轴联动驱动机构与第二多轴联动驱动机构配合,实现上热刀封组件和下热刀封组件的啮合。
4、进一步优选的,所述上热刀封组件与下热刀封组件之间设置有导向轴,上热刀封组件和下热刀封组件沿导向轴轴向相对运动。
5、更进一步优选的,所述导向轴的一端与下热刀封组件固定连接,导向轴的另一端与上热刀封组件滑动连接。
6、更进一步优选的,所述导向轴的一端与上热刀封组件固定连接,导向轴的另一端与下热刀封组件滑动连接。
7、进一步优选的,所述第一多轴联动驱动机构和所述第二多轴联动驱动机构均为二轴并联机械臂。
8、进一步优选的,所述第一多轴联动驱动机构和所述第二多轴联动驱动机构均为至少两个转动关节的串联机械臂。
9、更进一步优选的,所述第一多轴联动驱动机构和所述第二多轴联动驱动机构均为xy平面运动机构或十字滑台运动机构。
10、进一步优选的,所述第一多轴联动驱动机构和第二多轴联动驱动机构分别包括伺服伸缩驱动件ⅰ和伺服伸缩驱动件ⅱ,伺服伸缩驱动件ⅰ的缸体部分可转动地装配在刀封框架上,伺服伸缩驱动件ⅰ的伸缩端与上热刀封组件或下热刀封组件的一端铰接;伺服伸缩驱动件ⅱ的缸体部分可转动地装配在刀封框架上,伺服伸缩驱动件ⅱ的伸缩端与上热刀封组件或下热刀封组件的另一端铰接。
11、所述伺服伸缩驱动件ⅰ和伺服伸缩驱动件ⅱ为伺服电缸。
12、所述伺服伸缩驱动件ⅰ和伺服伸缩驱动件ⅱ均包括伺服电机、减速机、转动套筒和螺杆,伺服电机与减速机相连,伺服电机和减速机通过电机安装座可转动地装配在刀封框架上,转动套筒与减速机的输出轴连接,转动套筒内设置有与螺杆上外螺纹配合的内螺纹,螺杆的一端与转动套筒螺纹连接,螺杆的另一端通过连接座与上热刀封组件或下热刀封组件铰接。
13、与现有技术相比,本发明所带来的有益的技术效果表现在:
14、1、提高包装机响应速度及工作性能:本发明基于多轴联动的包装机用刀封装置不需要传统包装机的复杂机架结构,只要带动上热刀封组件和下热刀封组件运动,有效负载率大幅度提高,相同条件下包装机速度、响应性能进一步提升;由于负载重量降低,产生的冲击力减小,相同情况下传统包装机高速运转情况下的振动、噪音问题得到有效改善,提高了工作性能,改善了包装工人操作环境。
15、2、提高包装机有效负载率,减少零部件数量,降低整机成本,提高装配效率:相比较传统结构,本发明基于多轴联动的包装机用刀封装置不需要传统结构的复杂机架结构,减少了整体零部件数量;有利于提高整机装配速度、精度,也有利于提高零部件标准化程度,采用大规模生产加工工艺,降低成本,并降低整机重量,便利运输、部署。
16、3、提高总体精度、刚度、啮合压力:本发明采用多轴联动驱动机构分别驱动,采用多轴并联驱动的方式,各驱动误差不累计,负载分配至每个驱动机构,故精度、承载能力(啮合压力)较高,负载压力分配至每个驱动环节,整机机构刚度高。
17、4、提高软硬件附加值:本发明基于多轴联动的包装机用刀封装置结构简洁,采用多轴联动控制技术,控制四台伺服电机正确时序运动和保持力矩,产品具有较高的软件附加值;可通过软件设定对刀封装置进行调配,适应性更高,更加有利于对包装规格及包装膜材质变化的适配,不需要调整机械机构即可进行适配。
18、5、提高刀封轨迹控制性,本发明基于多轴联动的包装机用刀封装置可以在工作区域内以设定的位置轨迹运动;不需要传统的升降机构调整啮合高度位置,其位置轨迹不受传统刀封装置的机架结构限制。
- 还没有人留言评论。精彩留言会获得点赞!