一种巡检机器人收放拖缆装置及其收放拖缆方法与流程
本发明涉及收放拖缆装置,具体为一种巡检机器人收放拖缆装置及其收放拖缆方法。
背景技术:
1、巡检机器人融合了嵌入式技术、传感器技术、电子电气、路径规划、人工智能和自动控制等技术,近年来一直吸引着众多科学工作者的关注,自动巡检机器人应用领域广泛,包括自动驾驶、核电站维护、未知区域探测、无人工程产品运输等等,巡检机器人对现代设备作用越来越大,目前行业内巡检机器人大多为自身提供电池做为动力源,采用本体内置电机的方式驱动机器人行走,完成巡检任务,在有线式巡检机器人的使用过程中,外侧会连接对应的电缆,电缆的放置和回收需要使用收放拖缆装置来控制收放。
2、中国专利公开了一种巡检机器人系统用收放线装置(授权公告号cn 209411534u),该专利技术包括:方形外壳和装置本体,所述方形外壳下侧开口,其罩在所述装置本体上;所述装置本体,包括:左侧立板和右侧立板,所述左侧立板和右侧立板通过横向设置在前后两侧的上方形梁和下方形梁连接,左右两侧间隔设置的左侧固定板和右侧固定板前后两端均与上方形梁和下方形梁滑动连接。本发明的有益效果为,提供了一种巡检机器人系统用收放线装置,利用该装置能够实现拖链或线缆的收线和放线,能够对拖链或线缆进行有效管理,能够避免拖链或线缆交缠在一起,效果显著,便于在产业上推广和应用。
3、但是,上述的收放拖缆装置在使用过程中,收放线缆过程中线缆的外侧缺少限位,收放过程的方向也不易微调。因此,本领域技术人员提供了一种巡检机器人收放拖缆装置及其收放拖缆方法,以解决上述背景技术中提出的问题。
技术实现思路
1、本发明的目的在于提供一种巡检机器人收放拖缆装置及其收放拖缆方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
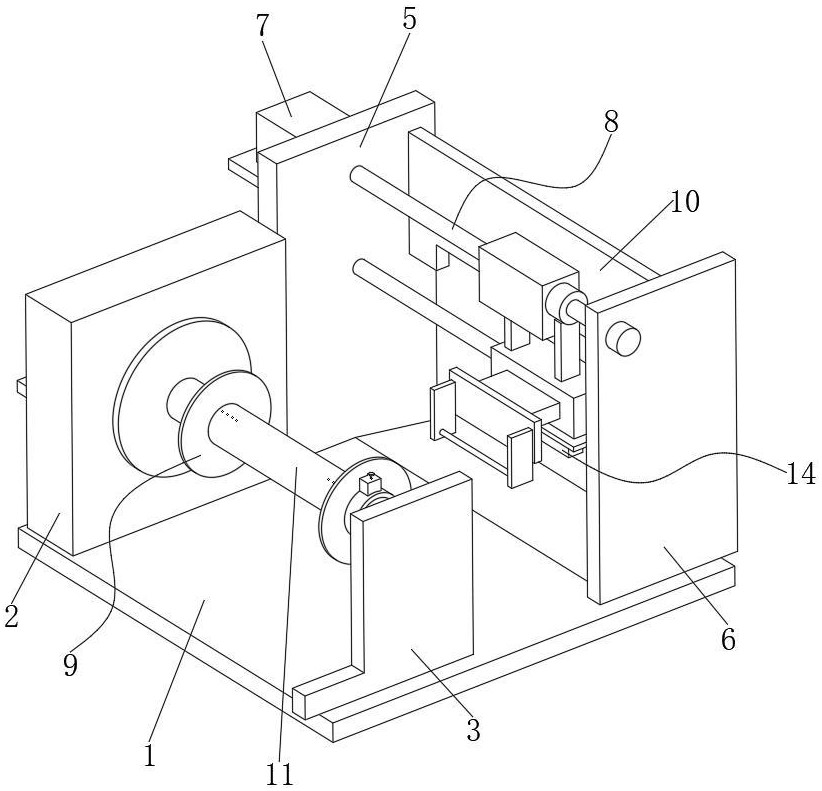
3、一种巡检机器人收放拖缆装置及其收放拖缆方法,包括稳定固定座,所述稳定固定座的顶部固定有第一铸铁安装支架,所述稳定固定座的顶部固定有第二铸铁安装支架,所述稳定固定座的顶部固定有第三铸铁安装支架,所述稳定固定座的顶部固定有第四铸铁安装支架,所述第一伺服电机的一侧安装有第一伺服电机,所述第三铸铁安装支架的一侧固定有第二伺服电机,所述第三铸铁安装支架和所述第四铸铁安装支架之间设置有收放缆角度微调装置,所述第三铸铁安装支架和所述加固安装支架之间固定有加固安装支架,所述第一伺服电机的输出轴外侧固定有收放线缆轴,所述收放线缆轴的内部开设有多个定位安装孔,所述收放线缆轴的外侧设置有收放缆限位装置,所述稳定固定座的顶部开设有倒角;
4、所述收放缆角度微调装置包括滚珠丝杆,所述滚珠丝杆的外侧螺纹连接有可自锁滚珠螺母,所述可自锁滚珠螺母的外侧固定有移动定位套,所述第四铸铁安装支架的外侧固定有制动器,所述第三铸铁安装支架和所述第四铸铁安装支架的对应面之间固定有导向碳钢杆,所述移动定位套的底部固定有第一连接架,所述可自锁滚珠螺母的底部固定有第二连接架,所述第一连接架和所述第二连接架的底部固定有活动导向套,所述活动导向套的外侧安装有连接碳钢块,所述连接碳钢块远离所述活动导向套的一端固定有碳钢连接安装板,所述碳钢连接安装板的外侧固定有两个导向移动支架,两个所述导向移动支架的对应面之间固定有导向收放缆连接杆所述活动导向套的底部固定有收放夹持锁定机构;
5、所述收放夹持锁定机构包括安装支撑板,所述安装支撑板的底部固定有两个连接壳体,所述连接壳体的一侧内壁固定有第三伺服电机,所述第三伺服电机的输出轴外侧固定有金属偏心轮,所述连接壳体的两侧内壁之间固定有内部安装板,所述内部安装板的一侧连接有安装弹簧,所述安装弹簧的一端连接有活动垫,所述活动垫的外侧固定有导向柱,所述导向柱的一端安装有支撑垫,所述支撑垫的一侧固定有金属支撑杆,所述金属支撑杆远离支撑垫的一端固定有夹持定位套。
6、作为本发明再进一步的方案:所述第二伺服电机的输出轴与所述滚珠丝杆之间固定连接,所述活动导向套活动套接在所述导向碳钢杆的外侧。
7、作为本发明再进一步的方案:所述第三铸铁安装支架的内部开设有通孔,且该通孔的尺寸与所述滚珠丝杆的尺寸适配。
8、作为本发明再进一步的方案:所述第四铸铁安装支架的内部开设有通孔,且该通孔的尺寸与所述滚珠丝杆的尺寸适配,所述滚珠丝杆的一端配合安装在所述制动器的内部。
9、作为本发明再进一步的方案:所述移动定位套的内部开设有连接孔,且该连接孔的尺寸与所述滚珠丝杆的尺寸适配。
10、作为本发明再进一步的方案:所述收放缆限位装置包括收放缆限位板,所述收放缆限位板的一侧固定有定位固定套,所述定位固定套的顶部固定有定位固定壳体,所述定位固定壳体的内顶壁设置有复位弹簧,所述复位弹簧的底部连接有限位铸铁板,所述限位铸铁板的底部固定有定位铸铁杆,所述限位铸铁板的顶部安装有活动铸铁柱。
11、作为本发明再进一步的方案:所述活动铸铁柱的顶部固定有铸铁把手板,所述定位铸铁杆的尺寸与所述收放线缆轴的尺寸适配。
12、作为本发明再进一步的方案:所述定位固定壳体的内部开设有安装孔,且该安装孔的尺寸与所述定位铸铁杆的尺寸适配。
13、作为本发明再进一步的方案:所述定位固定套的内部开设有限位孔,且该限位孔的尺寸与所述定位铸铁杆的尺寸适配;所述铸铁把手板的外侧开设有防滑纹,所述收放缆限位板和所述定位固定套均活动套接在所述收放线缆轴的外侧。
14、本发明涉及一种巡检机器人收放拖缆装置的收放拖缆方法,在进行巡检机器人的电缆收放时,电缆的一端与巡检机器人固定连接,同时电缆缠绕在收放线缆轴的外侧,巡检机器人在放出后移动时,需要启动第一伺服电机,让第一伺服电机的输出轴带动收放线缆轴转动,通过收放线缆轴转动辅助收放线缆轴外侧的电缆放缆,且随着巡检机器人的移动,放缆时需要对角度微调时,可以启动第二伺服电机,让第二伺服电机的输出轴带动滚珠丝杆转动,滚珠丝杆转动后能够带动滚珠丝杆外侧的可自锁滚珠螺母水平方向活动,此时可自锁滚珠螺母可以带动移动定位套同时水平方向移动,而且可自锁滚珠螺母底部固定有第二连接架,移动定位套的底部固定有第一连接架,能够让第一连接架和第二连接架带动活动导向套水平方向活动,活动导向套可以在导向碳钢杆的外侧水平方向移动,活动导向套的外侧通过连接碳钢块固定连接有碳钢连接安装板,碳钢连接安装板的外侧通过导向移动支架固定有导向收放缆连接杆,放缆过程中线缆是搭在导向收放缆连接杆顶部的,从而通过调整移动定位套和可自锁滚珠螺母位置的方式对活动导向套和导向收放缆连接杆的位置调整,导向收放缆连接杆位置调整后则可以带动放缆过程中的电缆位置微调;
15、收缆时需要对角度微调时,可以启动第二伺服电机,让第二伺服电机的输出轴带动滚珠丝杆转动,滚珠丝杆转动后能够带动滚珠丝杆外侧的可自锁滚珠螺母水平方向活动,可自锁滚珠螺母可以带动移动定位套同时水平方向移动,能够让第一连接架和第二连接架带动活动导向套水平方向活动,活动导向套可以在导向碳钢杆的外侧水平方向移动,收缆过程中线缆是搭在导向收放缆连接杆顶部的,从而通过调整移动定位套和可自锁滚珠螺母位置的方式对活动导向套和导向收放缆连接杆的位置调整,导向收放缆连接杆位置调整后则可以带动收缆过程中的电缆位置微调;
16、当巡检机器人的线缆缠绕在收放线缆轴外侧时,可以根据巡检机器人线缆的使用需求对两个收放缆限位板的位置进行调节,调节收放缆限位板的位置时可以向顶部拉动铸铁把手板,通过铸铁把手板带动活动铸铁柱活动,活动铸铁柱可以带动限位铸铁板移动,并让限位铸铁板挤压复位弹簧的一端,此时限位铸铁板同时带动定位铸铁杆从对应收放线缆轴内脱出,解锁定位固定套位置锁定后拨动定位固定套在收放线缆轴外侧移动,定位固定套和收放缆限位板移动至合适位置后,可以松开铸铁把手板,让定位固定壳体内的复位弹簧推动限位铸铁板活动,且定位铸铁杆可以活动插接进对应收放线缆轴内,可以方便地完成收放缆限位板位置的多档位调节,从而适应巡检机器人收放拖缆的使用需求。
17、与现有技术相比,本发明的有益效果是:
18、1、本装置设置有收放缆角度微调装置,在进行巡检机器人的电缆收放时,电缆的一端与巡检机器人固定连接,同时电缆缠绕在收放线缆轴的外侧,巡检机器人在放出后移动时,需要启动第一伺服电机,让第一伺服电机的输出轴带动收放线缆轴转动,而通过调整移动定位套和可自锁滚珠螺母位置的方式对活动导向套和导向收放缆连接杆的位置调整,导向收放缆连接杆位置调整后则可以带动放缆过程中的电缆位置微调,起到了收可以微调放缆角度的目的,收缆时需要对角度微调时,收缆过程中线缆是搭在导向收放缆连接杆顶部的,从而通过调整移动定位套和可自锁滚珠螺母位置的方式对活动导向套和导向收放缆连接杆的位置调整,导向收放缆连接杆位置调整后则可以带动收缆过程中的电缆位置微调,有利于巡检机器人收放拖缆的使用;
19、2、本装置设置有收放缆限位装置,当巡检机器人的线缆缠绕在收放线缆轴外侧时,可以根据巡检机器人线缆的使用需求对两个收放缆限位板的位置进行调节,定位固定套和收放缆限位板移动至合适位置后,可以松开铸铁把手板,让定位固定壳体内的复位弹簧推动限位铸铁板活动,且定位铸铁杆可以活动插接进对应倒角内,可以方便地完成收放缆限位板位置的多档位调节,从而适应巡检机器人收放拖缆的使用需求。
20、3.本装置设置有收放夹持锁定机构,在进行巡检机器人收放拖缆过程中,连接壳体内的第三伺服电机不启动,不会影响巡检机器人收放拖缆的正常进行,在巡检机器人收放拖缆完成后,为了避免拖缆仍然收放影响巡检机器人的正常使用和运行,可以拨动拖缆抬起,拖缆抬起后具体设置在两个夹持定位套之间,让两个夹持定位套对应面夹紧在相应的拖缆外侧,完成拖缆的夹持固定,能够配合巡检机器人收放拖缆的进行。
- 还没有人留言评论。精彩留言会获得点赞!