适用于工业机器人手臂的3D打印喷头及其使用方法
适用于工业机器人手臂的3d打印喷头及其使用方法
技术领域
1.本发明涉及适用于工业机器人手臂的3d打印喷头及其使用方法,属于3d打印技术领域。
背景技术:
2.作为增材制造技术的一种,3d打印技术可以实现从模型到实体的快速制造,在生物医疗、智能制造等行业都具有很好地应用前景。目前国内外的3d打印设备都是基于3坐标伺服平台,即通过三个独立的伺服电机控制喷头在x、y、z三个方向的移动。
3.3坐标伺服系统具有反应快,准确度高的优点,打印时首先需要对打印平台进行找平,然后将模型按照z轴方向进行分层,再进行逐层打印,对打印环境具有较高的要求,如打印基体是斜面甚至复杂曲面时,3坐标伺服系统即很难完成打印任务。
技术实现要素:
4.本发明的目的是针对上述现有技术的不足,提供一种适用于工业机器人手臂的3d打印喷头及其使用方法,以完成多种形状的打印基体(包括斜面、甚至复杂曲面)的打印任务。
5.本发明的技术方案如下:
6.适用于工业机器人手臂的3d打印喷头,其特征是,包括法兰盘、控制盒、料筒、针头,所述法兰盘用于与工业机器人手臂相连;所述料筒的两端分别连通控制盒、针头,所述料筒内设有活塞;所述控制盒的两端铰接于法兰盘,且所述控制盒侧壁设有进气口,由进气口进气,驱动活塞挤压物料,经针头挤出物料。
7.进一步的,所述法兰盘端面设有两个外凸的安装座,所述控制盒的相对两侧壁分别设有连接轴,两个安装座分别设有与连接轴配合的安装孔,所述控制盒置于两个安装座之间,两个连接轴分别安装于两个安装孔内,以便控制盒相对于法兰盘转动。
8.进一步的,其中一个连接轴为中空结构,该连接轴的中心孔作为进气口,并与控制盒内腔连通。
9.进一步的,所述控制盒侧壁设有角度刻度线,所述角度刻度线沿连接轴周向布置,所述安装座设有读取角度刻度线的可视窗口。
10.进一步的,所述控制盒的前端面设有料筒安装圆孔,所述料筒安装圆孔的相对两侧设有外凸的导向槽,所述料筒外壁的相对位置设有与导向槽匹配的限位块;通过转动料筒,使限位块与导向槽对应与否,以取出或固定料筒。
11.进一步的,所述料筒与控制盒连接处设有密封毛毡,所述密封毛毡在与导向槽对应位置设有与之匹配的密封毛毡块体。
12.进一步的,所述控制盒在料筒安装圆孔外沿设有锁紧旋钮,该锁紧旋钮通过转轴与控制盒外壁转动连接,且该锁紧旋钮的外轮廓具有一大端、一小端,通过旋转锁紧旋钮,使大端或小端位于密封毛毡上方,以实现对密封毛毡的锁紧或释放。
13.进一步的,所述控制盒在靠近法兰盘的端面为圆弧面,以便控制盒实现转动。
14.上述适用于工业机器人手臂的3d打印喷头的使用方法,其特征是,包括以下步骤:
15.1)安装:
16.将工业机器人手臂置于初始位置,第六轴上的法兰盘垂直向前,将3d打印喷头的法兰盘与第六轴上的法兰盘进行刚性连接,旋转控制盒,使法兰盘的可视窗口与控制盒上角度刻度线的0
°
位置对应;
17.将针头安装于料筒,将物料装在料筒中,在料筒内装入活塞;将料筒对准控制盒的料筒安装圆孔,使限位块与导向槽对应,料筒插入料筒安装圆孔,旋转料筒,使限位块位于控制盒内并与导向槽错开,以锁紧料筒;
18.在料筒与料筒安装圆孔处安装密封毛毡,并将密封毛毡的两个密封毛毡块体置于两个导向槽内;旋转锁紧旋钮,使锁紧旋钮的大端位于密封毛毡上方,以实现对密封毛毡的限位和锁紧;
19.此时,保证针头垂直向下,将进气口通过气管连接工业机器人的气源;
20.2)调试:
21.控制第六轴转动到适当位置,并记录第六轴角度α,转动控制盒至合适角度,记录此时转角读数β,控制机器人使针头触碰打印基体上的打印原地,记录触碰时的坐标p0,此时打印喷头末端的方位坐标系:
[0022][0023]
3)模型处理:
[0024]
将需要打印的三维模型进行处理,以打印原地为坐标原地,将打印物体上每个点p
n
的坐标按照以下公式(3)进行转置处理,并将所得点按照z
nt
的大小进行分层,按照正交或s形分形算法将同层的点进行分形处理,得到针头的移动轨迹:
[0025]
p
z
=[p
z1 p
z2 ··· p
zn
]
ꢀꢀ
(2);
[0026]
p
nt
=[x
nt y
nt z
nt
]=p
n
r
t
=[x
n y
n z
n
]r
t
ꢀꢀ
(3);
[0027]
4)机器人程序生成:
[0028]
按照针头的移动轨迹,按照以下公式(4)计算机器人针头的移动轨迹:
[0029]
p
r1
=[x
r1 y
r1 z
r1
]=p
z1
·
invr
t
=[x
z1 y
z1 z
z1
]
·
invr
t
ꢀꢀ
(4),
[0030]
通过线性运动指令,movel指令,实现机器人点位直接的运动,生成机器人控制程序;
[0031]
5)打印:
[0032]
根据材料的粘性,设置控制盒中的气压,并通过控制程序控制机器人进行移动,同时通过增加控制盒内气压的方式挤压活塞,挤出物料,完成3d打印工作。
[0033]
本发明是一款可以与6轴或者7轴工业机器人手臂进行连接的3d打印喷头,以适应打印基体是斜面甚至复杂曲面时的3d打印任务,在医疗、生物支架的3d打印上有着良好的应用前景。
附图说明
[0034]
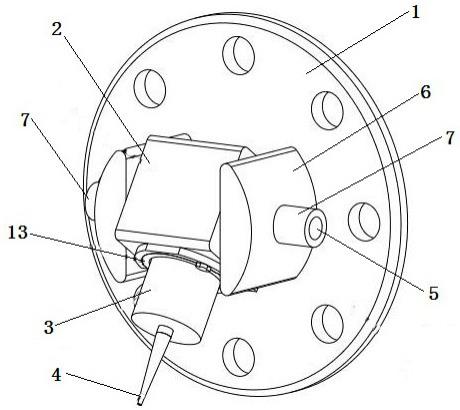
图1为本发明3d打印喷头的结构示意图;
[0035]
图2为图1的左视图;
[0036]
图3为图1的右视图;
[0037]
图4为本发明法兰盘的结构示意图;
[0038]
图5为本发明料筒的结构示意图;
[0039]
图6为本发明密封毛毡的结构示意图;
[0040]
图7为本发明控制盒的结构示意图;
[0041]
图8为图7的左视图;
[0042]
图9为图7的右视图;
[0043]
图10为图7的正视图;
[0044]
图中:法兰盘1、控制盒2、料筒3、针头4、进气口5、安装座6、连接轴7、角度刻度线8、可视窗口9、料筒安装圆孔10、导向槽11、限位块12、密封毛毡13、密封毛毡块体14、锁紧旋钮15、锁紧旋钮的大端16、锁紧旋钮的小端17、圆弧面18。
具体实施方式
[0045]
如图所示,适用于工业机器人手臂的3d打印喷头,包括法兰盘1、控制盒2、料筒3、针头4,所述法兰盘用于与工业机器人手臂相连;所述料筒的两端分别连通控制盒、针头,所述料筒内设有活塞;所述控制盒的两端铰接于法兰盘,且所述控制盒侧壁设有进气口5,由进气口进气,驱动活塞挤压物料,经针头挤出物料。
[0046]
具体的:
[0047]
1、所述法兰盘端面设有两个外凸的安装座6,所述控制盒的相对两侧壁分别设有连接轴7,两个安装座分别设有与连接轴配合的安装孔,所述控制盒置于两个安装座之间,两个连接轴分别安装于两个安装孔内。其中一个连接轴为中空结构,该连接轴的中心孔作为进气口,并与控制盒内腔连通。所述控制盒侧壁设有角度刻度线8,所述角度刻度线沿另一个连接轴周向布置,所述安装座设有读取角度刻度线的可视窗口9。
[0048]
所述控制盒在靠近法兰盘的端面为圆弧面18,以便控制盒相对于法兰盘实现转动(可以通过手动方式旋转控制盒,或者增设动力源,驱动未作为进气口的连接轴而带动控制盒旋转)。
[0049]
2、所述控制盒的前端面设有料筒安装圆孔10,所述料筒安装圆孔的相对两侧设有外凸的导向槽11,所述料筒外壁的相对位置设有与导向槽匹配的限位块12;通过转动料筒,使限位块与导向槽对应与否,以取出或固定料筒。所述料筒与控制盒连接处设有密封毛毡13,所述密封毛毡在与导向槽对应位置设有与之匹配的密封毛毡块体14。所述控制盒在料筒安装圆孔外沿设有锁紧旋钮15,该锁紧旋钮通过转轴与控制盒外壁转动连接,且该锁紧旋钮的外轮廓具有一大端16、一小端17,通过旋转锁紧旋钮,使大端或小端位于密封毛毡上方,以实现对密封毛毡的锁紧或释放。
[0050]
3、适用于工业机器人手臂的3d打印喷头的使用方法,包括以下步骤:
[0051]
1)安装:
[0052]
将工业机器人手臂置于初始位置,第六轴上的法兰盘垂直向前,将3d打印喷头的
法兰盘与第六轴上的法兰盘进行刚性连接,旋转控制盒,使法兰盘的可视窗口与控制盒上角度刻度线的0
°
位置对应;
[0053]
将针头安装于料筒,将物料装在料筒中,在料筒内装入活塞;将料筒对准控制盒的料筒安装圆孔,使限位块与导向槽对应,料筒插入料筒安装圆孔,旋转料筒,使限位块位于控制盒内并与导向槽错开,以锁紧料筒;
[0054]
在料筒与料筒安装圆孔处安装密封毛毡,并将密封毛毡的两个密封毛毡块体置于两个导向槽内;旋转锁紧旋钮,使锁紧旋钮的大端位于密封毛毡上方,以实现对密封毛毡的限位和锁紧;
[0055]
此时,保证针头垂直向下,将进气口通过气管连接工业机器人的气源;
[0056]
2)调试:
[0057]
控制第六轴转动到适当位置,并记录第六轴角度α,转动控制盒至合适角度,记录此时转角读数β,控制机器人使针头触碰打印基体上的打印原地,记录触碰时的坐标p0,此时打印喷头末端的方位坐标系:
[0058][0059]
3)模型处理:
[0060]
将需要打印的三维模型进行处理,以打印原地为坐标原地,将打印物体上每个点p
n
的坐标按照以下公式(3)进行转置处理,并将所得点按照z
nt
的大小进行分层,按照正交或s形分形算法将同层的点进行分形处理,得到针头的移动轨迹:
[0061]
p
z
=[p
z1 p
z2 ··· p
zn
]
ꢀꢀ
(2);
[0062]
p
nt
=[x
nt y
nt z
nt
]=p
n
r
t
=[x
n y
n z
n
]r
t
ꢀꢀ
(3);
[0063]
4)机器人程序生成:
[0064]
按照针头的移动轨迹,按照以下公式(4)计算机器人针头的移动轨迹:
[0065]
p
r1
=[x
r1 y
r1 z
r1
]=p
z1
·
invr
t
=[x
z1 y
z1 z
z1
]
·
invr
t
ꢀꢀ
(4),
[0066]
通过线性运动指令,movel指令,实现机器人点位直接的运动,生成机器人控制程序;
[0067]
5)打印:
[0068]
根据材料的粘性,设置控制盒中的气压,并通过控制程序控制机器人进行移动,同时通过增加控制盒内气压的方式挤压活塞,挤出物料,完成3d打印工作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1