一种高精度大画幅3D打印调焦系统
一种高精度大画幅3d打印调焦系统
技术领域
1.本发明涉及3d打印技术领域,具体来说,是一种高精度大画幅3d打印调焦系统。
背景技术:
2.现如今3d打印技术已经运用在很多领域,光固化3d打印技术因为其制作原型表面质量好、打印速度较快、尺寸精度高等优点,是高精度成型的主要实现方式,被广泛运用在小尺寸高精度的产品生产。该技术利用光固化光敏树脂,通过逐层累加实现实体模型的制作。光固化的方式目前有激光扫描和dlp(digital light processor——数字光处理器)成像两种方式。dlp成像方式原则上可以实现微米级极高精度的3d打印,其核心显示器件为dmd(digital micromirror device——数字微镜),目前的最高分辨点数为2560*1600,打印尺寸与精度要求相关,如果按精度要求较低的0.1mm计算,最大能实现256mm*160mm的打印尺寸,如果加工精度进一步提高,其打印尺寸将进一步减小,难以满足众多产业需求的高精度、大尺寸加工要求。因此在保证微米级精度的同时扩大打印面积仍是亟需解决的难题。
3.目前,如何在保证产品尺寸的基础上提高打印精度,消除打印产品脆弱点,提高产品质量是亟待解决的问题。
4.克服两台或两台以上的dlp光机上下移动过程中,dlp光机的焦距不一致,导致所投影出的图片不清晰,图片不能很好的曝光在样品池中,且目前3d打印缺少拼接处图像处理,采取无拼接两维移动的方式,影响了精度。
技术实现要素:
5.本发明的目的是提供一种高精度大画幅3d打印调焦系统,以解决现有技术中存在的问题。
6.本发明的目的是这样实现的:一种高精度大画幅3d打印调焦系统,包括:
7.机架;
8.包含计算机的控制单元;
9.升降活动地安装在机架上的升降座,所述升降座下侧至少设有两个水平并排布置的、高度一致的dlp光机,所述dlp光机的投影端朝下布置;
10.升降驱动机构,所述升降驱动机构安装在机架上并与升降座传动连接;
11.内置光固化光敏材料的样品池,所述样品池处于dlp光机的正下方;
12.沿样品池外轮廓布置的刻度尺,所述刻度尺用于测量dlp光机投影的图片区域边缘与样品池边缘的偏差距离;
13.至少一个相机,所述相机的拍摄端朝向样品池和刻度尺的布置区域。
14.其中,所述dlp光机、升降驱动机构、相机均与控制单元电信号连接;
15.如相机拍摄到dlp光机投影的图片区域边缘与样品池边缘产生不符合工艺要求的偏差时,所述控制单元根据相机拍摄的dlp光机投影的图片区域边缘与样品池边缘的偏差量,控制升降驱动机构输出的升降行程,以使dlp光机投影的图片全部曝光于样品池内。
16.进一步地,所述升降座下侧设有两个水平并排布置的、高度一致的dlp光机,所述dlp光机的投影方向与水平面垂直,所述样品池边缘为矩形,并且dlp光机投影的图片在水平面上看为矩形。
17.进一步地,所述刻度尺为直尺,设有四个,并分别贴合样品池的四条边布置,所述刻度尺水平布置,所述样品池水平设置。
18.进一步地,所述升降驱动机构为受控制单元控制的丝杆电机,所述丝杆电机安装在机架上并与升降座传动连接,所述丝杆电机的输出行程垂直于水平面。
19.进一步地,所述相机设有若干个,并环绕样品池和刻度尺的布置区域,所述相机的拍摄方向与水平面垂直。
20.进一步地,在理想状态下dlp光机投影的图片分别贴合样品池的四条边。
21.本发明的有益效果在于:
22.相机、丝杆电机、两台dlp光机与水平面垂直,样品池、刻度尺与水平面平行,在垂直方向上移动dlp光机时,丝杆电机会将dlp光机移动到指定的距离,将图像通过dlp光机投影到样品池中,相机会采集图片在样品池中超出的距离或未超出样品池的距离,相机将采集的图片传输到计算机,计算机处理后,将dlp光机需移动距离的指令发给丝杆电机,丝杆电机进行上或下移动,直至dlp光机投影的图片正好曝光在样品池中,从而克服因dlp光机调焦原因所导致的打印精度低的问题。
附图说明
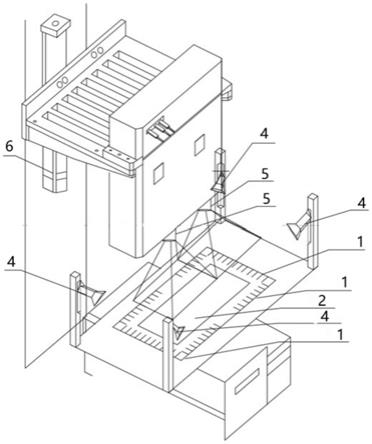
23.图1是本发明的系统布置图。
24.图2是本发明的dlp光机投影出的图片超出样品池的示意图。
25.图3是本发明的dlp光机投影出的图片未填满样品池的示意图。
26.图中,1刻度尺,2样品池,3超出区域,4相机,5dlp光机,6丝杆电机,7未填区域。
具体实施方式
27.下面结合附图1
‑
3和具体实施例对本发明进一步说明。
28.如图1所示,一种高精度大画幅3d打印调焦系统,包括:
29.机架;
30.包含计算机的控制单元;
31.升降活动地安装在机架上的升降座,升降座下侧设有两个水平并排布置的、高度一致的dlp光机5,dlp光机5的投影端朝下布置;
32.升降驱动机构,升降驱动机构安装在机架上并与升降座传动连接;
33.填充有光固化光敏树脂的样品池2,样品池2处于dlp光机5的正下方;
34.沿样品池2外轮廓布置的刻度尺1,刻度尺1用于测量dlp光机5投影的图片区域边缘与样品池2边缘的偏差距离;
35.至少一个相机4,相机4的拍摄端朝向样品池2和刻度尺1的布置区域。
36.其中,dlp光机5、升降驱动机构、相机4均与控制单元电信号连接。
37.如相机4拍摄到dlp光机5投影的图片区域边缘与样品池2边缘产生不符合工艺要求的偏差时,控制单元中的计算机根据相机4拍摄的dlp光机5投影的图片区域边缘与样品
池2边缘的偏差量进行计算,从而输出控制信号,控制升降驱动机构输出的升降行程,以使dlp光机5投影的图片全部曝光于样品池2内。
38.作为优化方案,所述升降座下侧设有两个水平并排布置的、高度一致的dlp光机5,dlp光机5的投影方向与水平面垂直,样品池2边缘为矩形,并且dlp光机5投影的图片在水平面上看为矩形。刻度尺1为直尺,设有四个,并分别贴合样品池2的四条边布置,刻度尺1水平布置,样品池2水平设置。在理想状态下dlp光机5投影的图片分别贴合样品池2的四条边(全等),不论dlp光机5的高度如何变化,dlp光机5投影的图片至少与样品池2在几何形状上相似,也即长宽比例相同。
39.作为优化方案,升降驱动机构为受控制单元控制的丝杆电机6,丝杆电机6安装在机架上并与升降座传动连接,丝杆电机6的输出行程垂直于水平面。
40.上述相机4设有若干个,并环绕样品池2和刻度尺1的布置区域,相机4的拍摄方向与水平面垂直。
41.本实施例在使用时:相机4、丝杆电机6、两台dlp光机5与水平面垂直,样品池2、刻度尺1与水平面平行,在垂直方向上移动dlp光机5时,丝杆电机6会将dlp光机5移动到指定的距离,将图像通过dlp光机5投影到样品池2中,相机4会采集图片在样品池2中超出的距离或未超出样品池2的距离,相机4将采集的图片传输到计算机,计算机处理后,将dlp光机5需移动距离的指令发给丝杆电机6,丝杆电机6进行上或下移动,直至dlp光机5投影的图片正好曝光在样品池2中。
42.如图2所示,dlp光机5投影出的图片超出样品池2边缘时,形成矩形的超出区域3并被相机4捕捉。
43.如图3所示,dlp光机5投影出的图片未填满样品池2时,会形成矩形的未填区域7并被相机4捕捉。
44.dlp光机5到达指定位置后,相机4会再次采集图片,并传输到计算机,并判断dlp光机5投影的图片是否全部曝光到样品池2中,若未曝光到样品池2中,将重复上述步骤,直到将dlp光机5移动到指定位置,图片全部曝光到样品池2中。
45.以上是本发明的优选实施例,本领域普通技术人员还可以在此基础上进行各种变换或改进,在不脱离本发明总的构思的前提下,这些变换或改进都应当属于本发明要求保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1