一种3D打印机的制作方法
一种3d打印机
技术领域
1.本发明涉及3d打印技术领域,尤其涉及一种3d打印机。
背景技术:
2.3d打印即快速成型技术的一种,又称增材制造,它是一种以数字模型文件为基础,运用粉末状金属或塑料等可粘合材料,通过逐层打印的方式来构造物体的技术。
3.例如,申请号为201710546102.7的专利所提出的3d打印喷头、3d打印喷头系统及3d打印机,其中,供的3d打印喷头、3d打印喷头系统及3d打印机,可以解决在现有的3d打印机上增加喷头或者更换成不同功能的喷头比较困难,喷头种类的扩展能力差的技术问题。
4.3d打印机相较于传统的零件加工模式能够通过数据模型快速制得样品,然而打印速度慢,无法批量生产是3d打印机的通病,通常3d打印机制得样品所需的加工时间通常为4-8小时,在研发新产品的过程中,样品起到试验、观察结构可靠性等作用,样品需要在流经多个部门(例如研发部、生产部、质检部等)进行研究,通常需要制备4-5个样品以供使用,导致加工时间大大延长,影响研发进度,而配置多台3d打印机的成本较高,因此,还有待改进。
技术实现要素:
5.有鉴于此,有必要提供一种3d打印机,用以解决3d打印机打印速度慢,无法满足研发新产品需要快速制得多个样品的需求的问题。
6.本发明提供一种3d打印机,包括主机、至少一个副机、主机测距组件以及位移量计算组件;所述主机具有一主打印端;所述副机具有一副打印端;所述主机测距组件用以测量所述主打印端的位移;所述位移量计算组件与所述主机测距组件电连接,所述位移量计算组件与副机的副打印端电性或信号连接,以经由计算所述主打印端的位移量使所述主打印端与副打印端同步移动。
7.进一步的,所述副机还包括一副机执行组件,所述位移量计算组件经由副机执行组件与所述副打印端连接,以驱动所述副打印端移动。
8.进一步的,所述副机执行组件包括第一执行端、第二执行端和第三执行端,所述副打印端可相对于所述副机沿相互垂直的第一方向、第二方向以及第三方向移动,所述第一执行端固定设于所述主机,所述第一执行端与所述第二执行端连接,用以驱动所述第二执行端沿所述第一方向移动,所述第二执行端与所述第三执行端连接,用以驱动所述第三执行端沿所述第二方向移动,所述第三执行端与所述副打印端连接,用以驱动所述副打印端沿所述第三方向移动。
9.进一步的,所述主机测距组件包括第一测距端、第二测距端以及第三测距端,所述第一测距端、第二测距端以及第三测距端均固定设于所述主打印端上,所述主打印端可相对于所述主机沿相互垂直的第四方向、第五方向以及第六方向移动,所述第一测距端用以测量所述主打印端沿所述第四方向移动的距离,所述第二测距端用以测量所述主打印端沿所述第五方向移动的距离,所述第三测距端用以测量所述主打印端沿所述第六方向移动的
距离。
10.进一步的,所述第一测距端、第二测距端以及第三测距端具有为激光传感器,三个所述激光传感器的发射端分别平行于第四方向、第五方向以及第六方向设置。
11.进一步的,所述主机内固定设置有与三个激光传感器一一对应的第一反光板、第二反光板以及第三反光板,所述第一反光板、第二反光板以及第三反光板均覆盖对应的所述激光传感器的照射区域。
12.进一步的,所述第一测距端、第二测距端以及第三测距端经由一环套与所述主打印端可拆卸连接。
13.进一步的,所述环套设于所述主打印端的外壁上,所述主打印端的底部为出料口,所述环套位于所述出料口的上方。
14.进一步的,所述位移量计算组件用以计算单位时间内的所述主打印端的位移量、并将所述位移量连续性的输出至所述副打印端中。
15.进一步的,所述位移量计算组件包括第一位移量计算端、第二位移量计算端、第三位移量计算端,所述副打印端可相对于所述副机沿相互垂直的第一方向、第二方向以及第三方向移动,所述主打印端可相对于所述主机沿相互垂直的第四方向、第五方向以及第六方向移动,所述第一位移量计算端用以计算单位时间内所述主打印端沿第四方向移动的第一距离,并驱动所述副打印端沿第一方向移动所述第一距离,所述第二位移量计算端用以计算单位时间内所述主打印端沿第五方向移动的第二距离,并驱动所述副打印端沿第二方向移动所述第二距离,所述第三位移量计算端用以计算单位时间内所述主打印端沿第六方向移动的第三距离,并驱动所述副打印端沿第三方向移动所述第三距离。
16.与现有技术相比,通过设置主机具有一主打印端,副机具有一副打印端,主机测距组件用以测量主打印端的位移,位移量计算组件与主机测距组件电连接,位移量计算组件与副机的副打印端电性或信号连接,以经由计算主打印端的位移量使主打印端与副打印端同步移动,相较于多台3d打印机实现量产的过程,本实施例中的3d打印机只需一套建模软件及相应的硬件,通过主机测距组件和位移量计算组件进行替代,同步生产多个样品所需的机器成本更低,在研发新产品的过程中可以低成本快速制得多个样品。
附图说明
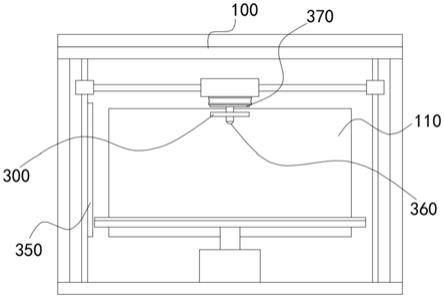
17.图1为本发明提供的一种3d打印机本实施例中主机与主机测距组件连接的结构示意图;
18.图2为本发明提供的一种3d打印机本实施例中主机测距组件的结构示意图;
19.图3为本发明提供的一种3d打印机本实施例中副机的结构示意图;
20.图4为本发明提供的一种3d打印机本实施例中整体的工作原理图。
具体实施方式
21.下面结合附图来具体描述本发明的优选实施例,其中,附图构成本技术一部分,并与本发明的实施例一起用于阐释本发明的原理,并非用于限定本发明的范围。
22.如图1和图3所示,本实施例中的一种3d打印机,包括主机100、至少一个副机200、主机测距组件300以及位移量计算组件400,主机100具有一主打印端110,副机200具有一副
打印端210主机测距组件300用以测量主打印端110的位移,位移量计算组件400与主机测距组件300电连接,位移量计算组件400与副机200的副打印端210电性或信号连接,以经由计算主打印端110的位移量使主打印端110与副打印端210同步移动。
23.其中,通过主机测距组件300以及位移量测量组件用以复制主机100的主打印端110的移动至副打印端210上,相较于多台3d打印机实现量产的过程,本实施例中的3d打印机只需一套建模软件及相应的硬件,在低成本的基础上实现量产的过程,下面进行更加详细的阐述和说明。
24.主机100为具备建模软件及相应的硬件的结构,副机200为不包含建模软件及相应的硬件结构的3d打印机,通过主机测距组件300以及位移量计算组件400使至少一个副打印端210与主打印端110相同步工作。
25.需要说明的是,副机200的数量越多,可以更加有效的提高生产效率,但相应的成本越高,副机200的数量根据单次所需量产的样品量以及经济情况而定。
26.为了便于副打印端210相对于主打印端110做出相应的动作,在一个优选的实施例中,副机200还包括一副机200执行组件,位移量计算组件400经由副机200执行组件与副打印端210连接,以驱动副打印端210移动。
27.其中,副机200执行组件包括第一执行端220、第二执行端230和第三执行端240,副打印端210可相对于副机200沿相互垂直的第一方向、第二方向以及第三方向移动,第一执行端220固定设于主机100,第一执行端220与第二执行端230连接,用以驱动第二执行端230沿第一方向移动,第二执行端230与第三执行端240连接,用以驱动第三执行端240沿第二方向移动,第三执行端240与副打印端210连接,用以驱动副打印端210沿第三方向移动。
28.在一个优选的实施例中,如图2所示,主机测距组件300包括第一测距端310、第二测距端320以及第三测距端330,第一测距端310、第二测距端320以及第三测距端330均固定设于主打印端110上,主打印端110可相对于主机100沿相互垂直的第四方向、第五方向以及第六方向移动,第一测距端310用以测量主打印端110沿第四方向移动的距离,第二测距端320用以测量主打印端110沿第五方向移动的距离,第三测距端330用以测量主打印端110沿第六方向移动的距离。
29.需要说明的是,上述副打印端210沿第一方向、第二方向以及第三方向的移动可实现在规定的空间范围内移动至任意位置处,同理,上述主打印端110沿第四方向、第五方向以及第六方向的移动可实现在规定的空间范围内移动至任意位置处,位于便于同步的过程,第一方向与第四方向平行,第二方向与第五方向平行,第三方向与第六方向平行。
30.在一个优选的实施例中,第一测距端310、第二测距端320以及第三测距端330具有为激光传感器,三个激光传感器的发射端分别平行于第四方向、第五方向以及第六方向设置,通过激光传感器能够测量主打印端110相对于主机100的固定点处的距离。
31.为了便于激光传感器的测量工作,在一个优选的实施例中,主机100内固定设置有与三个激光传感器一一对应的第一反光板350、第二反光板360以及第三反光板370,第一反光板350、第二反光板360以及第三反光板370均覆盖对应的激光传感器的照射区域。
32.其中,第一测距端310、第二测距端320以及第三测距端330经由一环套340与主打印端110可拆卸连接。
33.为了避免环套340干涉主打印端110的打印工作,在一个优选的实施例中,环套340
设于主打印端110的外壁上,主打印端110的底部为出料口,环套340位于出料口的上方。
34.在一个优选的实施例中,如图4所示,位移量计算组件400用以计算单位时间内的主打印端110的位移量、并将位移量连续性的输出至副打印端210中。
35.其中,位移量计算组件400包括第一位移量计算端410、第二位移量计算端420、第三位移量计算端430,副打印端210可相对于副机200沿相互垂直的第一方向、第二方向以及第三方向移动,主打印端110可相对于主机100沿相互垂直的第四方向、第五方向以及第六方向移动,第一位移量计算端410用以计算单位时间内主打印端110沿第四方向移动的第一距离,并驱动副打印端210沿第一方向移动第一距离,第二位移量计算端420用以计算单位时间内主打印端110沿第五方向移动的第二距离,并驱动副打印端210沿第二方向移动第二距离,第三位移量计算端430用以计算单位时间内主打印端110沿第六方向移动的第三距离,并驱动副打印端210沿第三方向移动第三距离。
36.工作流程:主机100工作,进行打印样品,主打印端110在第四方向、第五方向、第六方向的移动以实现上述打印样品的过程,在上述打印过程中,第一测距端310用以连续性的测量单位时间内主打印端110相对于主机100沿第四方向的位移,并通过第一位移量计算端410测量出单位时间内主打印端110在第四方向上的位移量,并连续性的将单位时间内的位移量传递给副机200,使副机200的副打印端210在第一方向上做出相应的位移,同理,副机200的副打印端210在第二方向上的位移以及第三方向上的位移分别与主机100的主打印端110在第五方向上的位移和第六方向上的位移同步,以实现主机100与副机200的同步打印工作。
37.与现有技术相比:通过设置主机100具有一主打印端110,副机200具有一副打印端210,主机测距组件300用以测量主打印端110的位移,位移量计算组件400与主机测距组件300电连接,位移量计算组件400与副机200的副打印端210电性或信号连接,以经由计算主打印端110的位移量使主打印端110与副打印端210同步移动,相较于多台3d打印机实现量产的过程,本实施例中的3d打印机只需一套建模软件及相应的硬件,通过主机测距组件300和位移量计算组件400进行替代,同步生产多个样品所需的机器成本更低,在研发新产品的过程中可以低成本快速制得多个样品。
38.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1