取放料机构和自动加注机的制作方法
1.本实用新型涉及自动上料领域,特别涉及一种取放料机构和自动加注机。
背景技术:
2.使用普通胶塞时,由于胶塞与敏感药物直接接触,可能会因为胶塞与药物的相互作用而导致相容性问题的发生。而覆膜胶塞通过在胶塞表面增加具有阻隔性的塑料薄膜,屏蔽了胶塞与药物的接触,提高了药品的安全性,故目前普遍采用覆膜胶塞包装药品。覆膜胶塞的生产过程为,一次硫化生产出半成品即带有未覆膜胶塞的整版胶片,半成品胶片经过冲切成独立的个体后,再将成百上千个半成品的未覆膜胶塞放入到模具中进行二次硫化,再经过二次冲切,得到最终成品即附膜胶塞。
3.二次硫化时,硫化模具少则需要放入几百个半成品,多则需要上千个。当前的生产过程中,大都需要依靠人工将成百上千个半成品逐个装入到相应的工装定位槽中。再利用取放料机构将工装定位槽中的半成品移送到硫化模具中。
4.在实际生产过程中,由于不同硫化模具之间的差异性,以及不同工人对模具安装的习惯不同,模具位置可能在每次更换模具后发生变化,而为了每次都能稳定有效的将半成品精确放入模具相应孔槽之中,对放入半成品橡胶附膜塞的位置误差要求较高。当模具安装位置和模具本身尺寸差异性较大时,可能导致吸盘吸取的半成品橡胶附膜塞不能正确放入模具中,影响二次硫化时产品的良率,导致现有的取放料机构经常需要工作人员在高温的模具上进行放料操作,极易对人员安全造成影响。
技术实现要素:
5.本实用新型提供一种取放料机构和自动加注机,以解决现有技术中存在的上述技术问题。
6.为解决上述技术问题,本实用新型提供一种取放料机构,包括:用于拾取或放置产品的取放料组件、固定基板、设置于所述固定基板上并与所述取放料组件连接的位置调整结构,其中,所述位置调整结构包括设置在所述固定基板和所述取放料组件之间并为所述取放料组件相对于固定基板提供平移和转动自由度的多自由度连接组件和通过所述多自由度连接组件驱动所述取放料组件平移或者转动的至少一组位置调整驱动。
7.作为优选,所述多自由度连接组件包括:至少一组双自由度连接组件,其中的双自由度分别为与取放料机构送料方向垂直的平移自由度和以垂向轴线为中心旋转的旋转自由度。
8.作为优选,所述多自由度连接组件包括:至少一组三自由度连接组件,其中的三自由度分别为与取放机构送料方向平行或垂直的平移自由度和以垂向轴线为中心旋转的旋转自由度。
9.作为优选,每组所述多自由度连接组件均包括设置于所述固定基板上的第一直线模组和/或与取放料组件连接的第二直线模组以及连接在固定基板与取放料组件之间的旋
转轴,其中,所述第一直线模组与第二直线模组同时设置时,两者设置方向相互垂直。
10.作为优选,所述位置调整驱动包括:分别设置于固定基板上的第一伺服驱动和第二伺服驱动,所述第一伺服驱动和第二伺服驱动的设置方向相同或相反且均与所述取放料机构送料方向垂直。
11.作为优选,所述位置调整结构通过位置调整基板与所述取放料组件连接。
12.作为优选,所述取放料机构还包括用于控制所述取放料组件升降的升降组件,所述升降组件设置于所述位置调整基板与所述取放料组件之间。
13.作为优选,还包括与所述固定基板连接并带动所述取放料组件在取料工位与放料工位之间移动送料的伸缩机构。
14.本实用新型还提供一种自动加注机,包括所述的取放料机构和设置在取放料机构的取料工位处的自动理料机构。
15.作为优选,所述自动理料机构包括:机架、安装在所述机架上的振动理料组件和为所述振动理料组件供料的循环输送组件。
16.作为优选,所述振动理料组件包括:理料盘、设置在所述理料盘底部以控制理料盘振动的振动驱动和控制所述理料盘倾斜或者水平的伸缩驱动。
17.作为优选,所述循环输送组件包括:位于所述振动理料组件的一端上方的储料仓、位于所述振动理料组件的另一端的下方的收料仓、连接在所述储料仓与所述收料仓之间的循环输送管道以及用于将所述收料仓中的物料驱动至所述储料仓的输送风机。
18.与现有技术相比,本实用新型具有以下优点:
19.本实用新型在原有取放料组件的基础上增加位置调整机构,使得所述取放料组件可以沿垂直于送料方向平移和沿垂向轴线旋转方,进而使取放料组件可以根据硫化模具的实际安装位置进行相应的调整,使半成品物料可以与硫化模具中相应的产品型腔能够一一对应。
20.通过伸缩机构与升降组件配合,共同驱动取放料组件将整理好的半成品物料从理料盘的定位槽中取出,然后伸入硫化模具中并将半成品物料准确放入到相应的产品型腔中。取代了人工,降低了人工逐个放入的劳动强度。本实用新型可以一次性放入所有半成品物料,即同一硫化模具中的所有半成品物料均是同时放入的,其硫化时间相同,从而可以大大提高了产品质量。解决了因人工逐批放入半成品物料导致同一硫化模具中的半成品物料的硫化时间不同,最终形成的产品质量一致性较差的问题。
21.本实用新型通过振动理料组件使半成品物料可以自动进入到相应的定位槽中,通过循环输送组件将多余产品收集储存,完全的取代了人工完成半成品物料上料和理料,为企业节省了人力成本。
附图说明
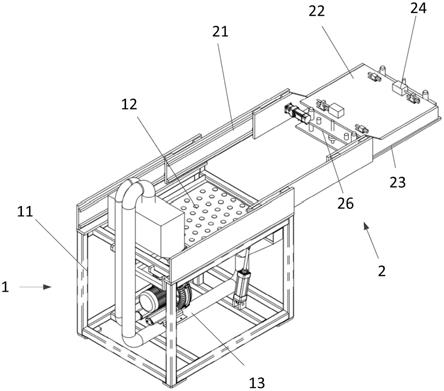
22.图1为本实用新型的自动加注机的立体结构示意图;
23.图2为本实用新型中自动理料机构处于理料工位时的结构示意图;
24.图3为本实用新型中自动理料机构处于上料工位时的结构示意图;
25.图4为本实用新型中取放料机构的结构示意图;
26.图5为本实用新型中取放料机构的组装结构示意图;
27.图6a为本实用新型中双自由度连接件的结构示意图;
28.图6b为本实用新型中三自由度连接件的结构示意图;
29.图7为本实用新型中取放料机构的立体结构示意图。
具体实施方式
30.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图对本实用新型的具体实施方式做详细的说明。需说明的是,本实用新型附图均采用简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本实用新型实施例的目的。
31.如图1所示,本实用新型提供一种自动加注机,包括自动理料机构1和取放料机构2。所述自动理料机构1用于对覆膜胶塞的半成品物料进行自动上料和理料,所述取放料机构2用于将理料完成后的半成品物料从取料工位也即是自动理料机构所在位置处移送至放料工位也即是硫化模具所在位置处。
32.参照图2和图3,所述自动理料机构1包括:机架11、安装在所述机架11上的振动理料组件12和为所述振动理料组件12供料的循环输送组件13。其中,所述循环输送组件13用于接收半成品物料并将半成品物料自动上料到振动理料组件12中,所述振动理料组件12利用半成品物料的重力作用和自身振动功能,使半成品物料可以顺利的进入到相应的定位槽中,实现半成品物料的自动理料。所述循环输送组件13还用于接收理料过程中未顺利进入到定位槽中的其他半成品物料,以便再次上料。
33.优选地,所述振动理料组件12包括:表面带有与半成品物料形状对应的定位槽的理料盘121、设置在所述理料盘121底部以控制理料盘121及其上的半成品物料振动的振动驱动122以及控制所述理料盘121倾斜或者水平的伸缩驱动123。也即是说,所述理料盘121具有两种工位,一种是如图3处于倾斜状态下的理料工位,另一种是如图2所示的理料完成后处于水平状态的上料工位(对应所述取放料机构2的取料工位)。理料工位和上料工位的切换由所述伸缩驱动实现。进一步的,为了确保所述理料盘121在工位切换时的位置准确度,即确保所述理料盘121在两个工位每次停止的位置都相同,故可以在机架11上分别设置定位机构,从而对理料盘121进行定位,确保取放料机构2每次都能够在正确的位置顺利取料。所述伸缩驱动123优选采用伸缩气缸。
34.作为优选,所述循环输送组件13包括:位于所述理料盘121的一端上方的储料仓131、位于所述理料盘121的另一端的下方的收料仓132、连接在所述储料仓131与所述收料仓122之间的循环输送管道133以及用于将所述收料仓132中的物料驱动至所述储料仓131的输送风机134。当然,所述储料仓131位于理料盘121的上料端也是相对于理料盘121位置较高的一端,并为理料盘121提供半成品物料,所述收料仓132位于理料盘121的出料端也是相对于理料盘121位置较低的一端,以便接收从理料盘121上滑落的半成品物料。所述输送风机134为所述收料仓132中的半成品物料提供动力,使其可以通过循环输送管道133返回到储料仓131中,以便于后续继续上料。
35.参照图1至图3,所述自动理料机构1的工作过程为:
36.理料盘121中还没有半成品物料时,伸缩气缸收缩将理料盘121降至理料位。
37.打开储料仓131,将储存的半成品物料放入理料盘121中,振动驱动122工作,带动所述理料盘121及其上的半成品物料振动,在重力和振动的双重作用下,理料盘121上的一
部分半成品物料可以准确落入到相应的定位槽中。多余的半成品物料则通过收料仓132收集,在输送风机134的作用下通过循环输送管道133送回储料仓131。如果理料盘121上所有的定位槽中都有半成品物料,则伸缩气缸伸出,将理料盘121推送至上料位,推送过程中所述理料盘121可以在定位机构的导向下进行精确定位。最后,等待取放料机构2将理料盘121里的半成品物料取走。
38.需要说明的是,上述步骤中的理料动作是可以重复多次进行的。实际生产过程中可以对理料的次数进行设定,即采取重复多次理料的方式来确保理料盘121的理料结果。也可以根据理料盘121上的半成品物料的数量判断是否需要重复上述理料操作。具体为,如果理料盘121上还有部分定位槽中没有半成品物料,则再次进行上述操作直至理料盘121中的定位槽中都有半成品物料为止。
39.参照图4至图6,所述取放料机构2包括设置在机架11上伸缩机构21、与所述伸缩机构21连接的固定基板22、用于拾取或放置产品的取放料组件23以及设置于所述固定基板22上并与所述取放料组件23连接的位置调整结构24。其中,所述伸缩机构21用于带动所述取放料组件23在取料工位与放料工位之间移动送料,也即是说,伸缩机构21用于带动所述取放料组件23在自动理料机构1与硫化模组之间移动送料,所述取放料组件23用于拾取自动理料机构1的理料盘121上的半成品物料,并将半成品物料放置到硫化模具的产品型腔中。所述位置调整机构24用于在硫化模具保养或安装完成后,根据硫化模具的位置对所述取放料组件23的位置做适应性的调整,使取放料组件23上的半成品物料的位置可以与硫化模具中的产品型腔一一对应。
40.优选地,所述伸缩机构21采用双级伺服伸缩机构,一方面可以通过伺服驱动,精确控制取放料组件34的伸出位置,另一方面可以在较小设备尺寸下实现较大的伸缩行程,从而大大减小设备的占地面积。进一步,所述取放料机构3还包括升降组件25,用于在取放料组件23拾取和放置半成品物料时,带动取放料组件23上升或下降。所述升降组件25可以设置在所述机架11上,通过所述伸缩机构21带动所述取放料组件23升降。本实施例优选将所述升降组件25也可以直接与取放料组件23连接,如此便于实现对取放料组件23进行精确的升降位置控制,同时也可以极大程度的提高取放料组件23的工作稳定性。
41.因此,通过伸缩机构21与升降组件25配合,共同驱动取放料组件23将整理好的半成品物料从理料盘121的定位槽中取出,然后伸入硫化模具中并将半成品物料准确放入到相应的产品型腔中。取代了人工,降低了人工逐个放入的劳动强度。本实用新型可以一次性放入所有半成品物料,即同一硫化模具中的所有半成品物料均是同时放入的,其硫化时间相同,从而可以大大提高了产品质量。解决了因人工逐批放入半成品物料导致同一硫化模具中的半成品物料的硫化时间不同,最终形成的产品质量一致性较差的问题。
42.具体地,所述升降组件25安装在位置调整基板26上,所述位置调整结构24通过所述位置调整基板26与所述取放料组件23连接。
43.重点参照图5,所述位置调整结构24包括设置在所述固定基板22和所述位置调整基板26之间并为所述取放料组件23提供相对于固定基板22平移和转动自由度的多自由度连接组件241和通过所述多自由度连接组件241驱动所述取放料组件23平移或者转动的至少一组位置调整驱动242。
44.作为优选,所述多自由度连接组件241包括:至少一组双自由度连接组件和至少一
组三自由度连接组件,其中的双自由度分别为与取放料机构2送料方向垂直的平移自由度和以垂向轴线为中心旋转的旋转自由度。三自由度分别为与取放料机构2送料方向平行或垂直的平移自由度和以垂向轴线为中心旋转的旋转自由度。
45.由于整个取放料组件23连同固定基板22和位置调整结构24都需要伸入到硫化模具中心,故对其整体尺寸有一定限制性要求,为了将整个取放料机构2的体积做得更小。本实施例优选采用两个位置调整驱动242和四个多自由度连接组件241配合,实现对所述取放料组件23的控制,其中双自由度连接组件设置优选设置为1个,三自由度连接组件优选设置为3个。具体操作时,两个位置调整驱动242同时动作,可以一次性控制所述取放料组件23完成平移和沿垂向轴线方向的旋转的调整。具体结构说明如下。所述双自由度连接组件包括第一直线模组241a/第二直线模组241b和旋转轴241c,其中,所述第一直线模组241a/第二直线模组241b的设置方向垂直于取放料机构2的送料方向也即是伸缩机构21的伸缩方向。所述第一直线模组241a/第二直线模组241b可以设置在固定基板22上也可以设置在位置调整基板26上,本实施例优选将第一直线模组241a/第二直线模组241b设置在固定基板22上,所述旋转轴241c则设置在所述第一直线模组241a/第二直线模组241b和所述位置调整基板26上,具体如图6a所示。
46.所述三自由度连接组件包括设置于所述固定基板22上的第一直线模组241a和设置在所述位置调整基板26上的第二直线模组241b以及连接在第一直线模组241a与第二直线模组241b之间的旋转轴241c,具体如图6b所示。其中,所述第一直线模组241a与第二直线模组241b的设置方向相互垂直,分别为平行和垂直于取放料机构2的送料方向。换句话说,所述双自由度连接组件包括一个单独设置的直线模组和一个旋转轴,所述三自由度连接组件在双自由度连接组件的基础上增加了一个直线模组。当直线模组只有一个时,优选设置在固定基板22上,当一个多自由度连接组件24中同时设置有两个直线模组时,则两个直线模组分层设置,分别设置在固定基板22和位置调整基板26上。并且,位于同一基板上的所有直线模组的全部相互平行,因此,位于不同基板上的任意两个直线模组的设置方向必然相互垂直。
47.作为优选,所述位置调整驱动242包括:分别设置于固定基板22上的第一伺服驱动242a和第二伺服驱动242b,所述第一伺服驱动242a和第二伺服驱动242b的设置方向相同或相反且均与所述取放料机构2的送料方向垂直。所述第一伺服驱动242a和第二伺服驱动242b分别独立连接至不同的多自由连接组件241,通过驱动固定基板22上的直线模组动作,从而使位置调整基板26相对于固定基板22平移与旋转。具体实现方式为:如果所述第一伺服驱动242a和第二伺服驱动242b如图4中所示方式一致,沿相反的方向布置时,控制其中一个位置调整伺服242伸出,另一个位置调整伺服242缩回,且保证两者伸出与缩回的量相等时,则可以实现位置调整基板26在平移方向上的独立运动。而当两位置调整伺服242都伸出或者都缩回时,则位置调整基板26会沿垂向轴线方向旋转运动。通过调整两位置调整伺服242不同的移动距离,便可以同时实现在平移和旋转方向上的调整。当然,所述位置调整驱动242用于在硫化模具的位置发生变动时进行动作,对所述取放料组件23的位置做适应性调整,并可以记住调整后位置状态,以便在后续每次放料时,做相同的调整。
48.需要说明的是,由于固定基板22上的所有直线模组均平行设置,故为了便于控制,优选将位于所述固定基板22上的直线模组设置为垂直于所述取放料机构2的送料方向,而
将位于位置调整基板26上的直线模组设置为平行于所述取放料机构2的送料方向。
49.参照图7,所述取放料组件23包括取放料基板231和安装在所述取放料基板231上的吸盘232,所述吸盘232的布置方式是与理料盘121中定位槽以及硫化模具中产品型腔的布置方式一致。如此,可以保证半成品物料可以被顺利取料和顺利放料。
50.显然,本领域的技术人员可以对实用新型进行各种改动和变型而不脱离本实用新型的精神和范围。这样,倘若本实用新型的这些修改和变型属于本实用新型权利要求及其等同技术的范围之内,则本实用新型也意图包括这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1