一种治具快换系统的制作方法
1.本实用新型涉及治具技术领域,尤其涉及一种治具快换系统。
背景技术:
2.工业机器人是可以装备用于对对象进行自动处理或加工的工具,可以进行多工位操作,在注塑行业内,现大部分已采用工业机器人取件的形式,以提高生产效率。但是当注塑机更换模具生产时,配套的取件治具也需要相应地进行人工更换,而人工更换治具费时费力,影响生产效率,因此急需要实现机器人自动更换治具,以节省人力,提高效率。
技术实现要素:
3.为了解决上述现有技术中存在的不足,本实用新型提供一种治具快换系统,其用于放置不同治具,通用性较好,实现了工业机器人的自动取放治具,提高了工业机器人治具的切换速率。
4.本实用新型解决上述技术问题所采用的技术方案为:一种治具快换系统,包括底座、多个立柱以及设置在每个所述立柱上的治具放置机构,多个所述立柱可拆卸连接在所述底座上,所述治具放置机构包括缓冲平台、滑板和立板,所述缓冲平台固定在所述立柱的顶端,所述滑板可滑动设置在所述缓冲平台上,且所述滑板与所述缓冲平台之间设置有缓冲机构,所述立板竖直固定在所述滑板上,且所述立板上可拆卸连接有治具基板。
5.所述缓冲平台的两端分别向上延伸固定有第一挡板和第二挡板,所述第一挡板和所述第二挡板之间固定有两块间隔分布的滑轨,所述滑板的底部设置有两块滑块,所述滑块滑动设于对应所述滑轨上。该结构中,滑轨固定在第一挡板和第二挡板之间,连接更为可靠,滑板通过滑块和滑轨的配合可滑动连接在缓冲平台上,从而移动更为顺畅。
6.所述缓冲机构包括两个缓冲弹簧,所述滑板的底部固定有缓冲板,所述缓冲板位于两块所述滑轨之间,两个所述缓冲弹簧间隔连接在所述缓冲板与所述第一挡板之间,以使得所述缓冲板保持向所述第一挡板运动的趋势。该结构中,缓冲机构包括两个缓冲弹簧,这样当立板受到工业机器人的冲击时,会往后退一段距离,避免了直接硬接触,抵消了工业机器人自动取放治具时的水平力,随后,在缓冲弹簧的作用下,会使得缓冲板靠近第一挡板,实现立板的自动复位。
7.所述滑板上固定有固定板,所述固定板上开设有一凹槽,所述立板的下端固定在所述凹槽内。该结构中,固定板的设置加强了立板与滑板之间的连接,且固定板上开设的凹槽用于供立板卡入,从而实现了立板的可靠连接。
8.所述立板上开设有一减重槽,且所述立板后侧与所述固定板之间固定有至少两个加强肋条。该结构中,减重槽的设置在不影响立板强度的情况下减轻了整体的质量,加强肋条的设置进一步加强了立板与固定板之间的连接可靠性。
9.所述立板的顶部间隔固定有两个夹板,每个所述夹板的上端开设有导向槽,所述治具基板的后端间隔固定有两个定位杆,所述定位杆位于对应所述导向槽内。该结构中,定
位杆用于与导向槽配合,这样在安装治具基板上,起到快速导向的作用,实现治具基板的快速安装定位。
10.所述固定板的两侧分别固定有定位柱,所述治具基板的底部开设有两个定位槽,所述定位柱插入设置在对应所述定位槽内。该结构中,定位柱用于与定位槽配合,这样实现治具基板牢靠连接,且便于快速拆装。
11.所述滑板上设置有用于检测工位上是否存在所述治具基板的检测机构,所述检测机构包括固定在所述滑板上的行程开关,当所述治具基板连接在所述立板上时,所述治具基板的下端与所述行程开关相接触。该结构中,行程开关用于与治具基板接触,当治具基板由上至下安装,其底部接触到行程开关。行程开关发送信号即代表检测到工位上存在治具基板。
12.所述检测机构还包括光电传感器,所述光电传感器固定在所述滑板上。该结构中,光电传感器为现有技术,其与行程开关配合,起到双重检测的作用。
13.所述立柱的个数为两个,两个所述立柱的高度不一致。该结构中,立柱为方钢管结构,立柱的底部焊接有铁板,铁板与底座之间通过螺栓进行连接,这样实现了位置可调,适用不同大小治具,具有一定通用性,两根立柱高度不一致,保证工业机器人自动取放治具无干涉。
14.与现有技术相比,本实用新型的优点在于:立柱采用可拆卸的方式连接在底座上,便于进行位置调节以及更换不同规格的立柱;治具放置机构用于供治具基板放置,治具事先安装在治具基板上,这样工业机器人只需要选择治具基板上的治具,便能实现快速换装选择;治具放置机构包括缓冲平台、滑板和立板,滑板可滑动设于缓冲平台上,并且在缓冲机构的作用抵消工业机器人自动放治具时的水平力,起到较好的保护作用;治具基板可拆卸设于立板上,便于更换安装不同治具的治具基板,具有较好的通用性;本实用新型用于放置不同治具,通用性较好,实现了工业机器人的自动取放治具,提高了工业机器人治具的切换速率。
附图说明
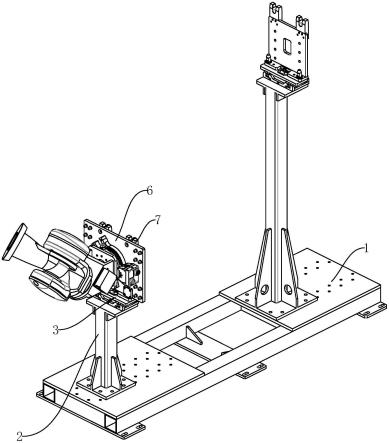
15.图1为本实用新型与工业机器人配合时的立体机构示意图;
16.图2为本实用新型的立体机构示意图;
17.图3为本实用新型中治具基板的立体机构示意图;
18.图4为本实用新型中治具放置机构的立体机构示意图;
19.图5为本实用新型中治具放置机构分解状态的立体机构示意图。
具体实施方式
20.以下结合附图和实施例对本实用新型作进一步详细说明,但不作为对本实用新型的限定。
21.实施例一:如图所示,一种治具快换系统,包括底座1、多个立柱2以及设置在每个立柱2上的治具放置机构3,多个立柱2可拆卸连接在底座1上,治具放置机构3包括缓冲平台31、滑板32和立板33,缓冲平台31固定在立柱2的顶端,滑板32可滑动设置在缓冲平台31上,且滑板32与缓冲平台31之间设置有缓冲机构,立板33竖直固定在滑板32上,且立板33上可
拆卸连接有治具基板6。
22.实施例二:如图所示,其他结构与实施例一相同,其不同之处在于,缓冲平台31的两端分别向上延伸固定有第一挡板34和第二挡板35,第一挡板34和第二挡板35之间固定有两块间隔分布的滑轨36,滑板32的底部设置有两块滑块37,滑块37滑动设于对应滑轨36上。该结构中,滑轨36固定在第一挡板34和第二挡板35之间,连接更为可靠,滑板32通过滑块37和滑轨36的配合可滑动连接在缓冲平台31上,从而移动更为顺畅。
23.缓冲机构包括两个缓冲弹簧5,滑板32的底部固定有缓冲板38,缓冲板38位于两块滑轨36之间,两个缓冲弹簧5间隔连接在缓冲板38与第一挡板34之间,以使得缓冲板38保持向第一挡板34运动的趋势。该结构中,缓冲机构包括两个缓冲弹簧5,这样当立板33受到工业机器人的冲击时,会往后退一段距离,避免了直接硬接触,抵消了工业机器人自动取放治具时的水平力,随后,在缓冲弹簧5的作用下,会使得缓冲板38靠近第一挡板34,实现立板33的自动复位。
24.滑板32上固定有固定板39,固定板39上开设有一凹槽40,立板33的下端固定在凹槽40内。该结构中,固定板39的设置加强了立板33与滑板32之间的连接,且固定板39上开设的凹槽40用于供立板33卡入,从而实现了立板33的可靠连接。
25.实施例三:如图所示,其他结构与实施例二相同,其不同之处在于,立板33上开设有一减重槽41,且立板33后侧与固定板39之间固定有至少两个加强肋条42。该结构中,减重槽41的设置在不影响立板33强度的情况下减轻了整体的质量,加强肋条42的设置进一步加强了立板33与固定板39之间的连接可靠性。
26.立板33的顶部间隔固定有两个夹板7,每个夹板7的上端开设有导向槽71,治具基板6的后端间隔固定有两个定位杆61,定位杆61位于对应导向槽71内。该结构中,定位杆61用于与导向槽71配合,这样在安装治具基板6上,起到快速导向的作用,实现治具基板6的快速安装定位。
27.固定板39的两侧分别固定有定位柱43,治具基板6的底部开设有两个定位槽62,定位柱43插入设置在对应定位槽62内。该结构中,定位柱43用于与定位槽62配合,这样实现治具基板6牢靠连接,且便于快速拆装。
28.实施例四:如图所示,其他结构与实施例三相同,其不同之处在于,滑板32上设置有用于检测工位上是否存在治具基板6的检测机构,检测机构包括固定在滑板32上的行程开关81,当治具基板6连接在立板33上时,治具基板6的下端与行程开关81相接触。该结构中,行程开关81用于与治具基板6接触,当治具基板6由上至下安装,其底部接触到行程开关81。行程开关81发送信号即代表检测到工位上存在治具基板6。
29.检测机构还包括光电传感器82,光电传感器82固定在滑板32上。该结构中,光电传感器82为现有技术,其与行程开关81配合,起到双重检测的作用。
30.立柱2的个数为两个,两个立柱2的高度不一致。该结构中,立柱2为方钢管结构,立柱2的底部焊接有铁板,铁板与底座1之间通过螺栓进行连接,这样实现了位置可调,适用不同大小治具,具有一定通用性,两根立柱2高度不一致,保证工业机器人自动取放治具无干涉。
31.值得注意的是,以上所述仅为本实用新型的较佳实施例,并非因此限定本实用新型的专利保护范围,本实用新型还可以对上述各种零部件的构造进行材料和结构的改进,
或者是采用技术等同物进行替换。故凡运用本实用新型的说明书及图示内容所作的等效结构变化,或直接或间接运用于其他相关技术领域均同理皆包含于本实用新型所涵盖的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1