一种颗粒塑胶加工用具有摇动装置的振动式智能悬挂输送系统的制作方法
1.本发明涉及悬挂输送技术领域,具体为一种颗粒塑胶加工用具有摇动装置的振动式智能悬挂输送系统。
背景技术:
2.悬挂输送系统一般由控制装置控制传输系统进行工作,通过悬挂在高处进行运输,具有节约空间的优点,在悬挂输送系统运输颗粒塑胶的过程中,部分颗粒塑胶会由于自身粘性而产生粘附结块的情况。
3.悬挂输送机在运输颗粒塑胶时,一般为了将粘在一起的颗粒塑胶打散,会设置摇动装置,而现有的摇动装置一般采用电机控制摇动仓循环小幅度转动,来实现振动抖散的目的,但是此方法中颗粒塑胶无法全面与摇动仓内壁接触,导致该装置的振动抖散效果较差。
技术实现要素:
4.针对现有技术的不足,本发明提供了一种颗粒塑胶加工用具有摇动装置的振动式智能悬挂输送系统,解决了上述背景技术中提出的问题。为实现以上目的,本发明通过以下技术方案予以实现:一种颗粒塑胶加工用具有摇动装置的振动式智能悬挂输送系统,包括悬挂板,所述悬挂板的内部上端固定有漏斗型进料仓,所述悬挂板的内部转动连接有摇动装置,所述摇动装置包括摇动仓、l型撞击杆,所述摇动仓的内部中端对称固定有两个波浪形搅动板,所述摇动仓的内部下端对称转动连接有两个十字搅拌板,所述摇动仓的外部错位固定有两个气压仓一,所述l型撞击杆固定在悬挂板上,且l型撞击杆贯穿且滑动连接在摇动仓的内部,所述摇动仓的底部排料管道内通过扭簧转轴转动连接有密封板。
5.优选的,所述悬挂板的前端固定有旋转电机,所述旋转电机的转杆处与摇动仓固定,所述摇动仓的侧壁上开设有弧形槽。
6.优选的,两个所述十字搅拌板靠近气压仓一的一端均固定有齿轮一,两个所述气压仓一的一端均固定有气囊一,两个气囊一分别位于弧形槽内的两侧,两个所述气压仓一的另一端均滑动连接有卡齿杆一,且两个卡齿杆一分别与两个齿轮一啮合。
7.优选的,所述悬挂板的底部固定有筛选装置,筛选装置包括筛选仓、二次输送装置、连接管道、旋钮杆,所述筛选仓的内部固定有筛选板,所述二次输送装置固定在筛选仓的外部,所述二次输送装置一端与筛选仓连接,所述二次输送装置的另一端位于摇动仓上方,所述连接管道贯穿且滑动连接在悬挂板的底部,所述旋钮杆的末端固定有凸轮,且旋钮杆通过固定块转动连接在悬挂板内壁底部,所述筛选仓的内部下端设置有振动装置。
8.优选的,所述振动装置包括支杆、敲击杆,所述敲击杆通过旋杆转动连接在筛选仓内部,所述敲击杆的一端转动连接有辅助振动杆,所述敲击杆的另一端固定有气囊二,所述气囊二底部固定有喷气管道。
9.优选的,所述连接管道的外部上端对称固定有横板,且横板与悬挂板之间设置有弹片,所述连接管道的内部固定有顶杆,所述筛选板倾斜固定在筛选仓的内部。
10.优选的,所述喷气管道的出气口位于辅助振动杆右侧,所述支杆上固定有伸缩弹性压杆,所述旋杆通过传动带与旋转电机的转杆处传动连接。
11.优选的,所述筛选仓的底部固定有定量分装装置,所述定量分装装置包括收集仓、线性电机,所述收集仓的内部固定有空心管道,所述空心管道的底部固定有两个分装管道,所述空心管道的内部转动连接有转动块,所述转动块的底部固定有齿轮二。
12.优选的,所述空心管道的顶端与底部均开设有两个开口,且顶端两个开口与底部两个开口呈错位状开设,所述转动块的内部开设有两个贯穿通道。
13.优选的,所述线性电机固定在收集仓的外部,且线性电机的移动轴上固定有卡齿杆二,卡齿杆二贯穿收集仓且与齿轮二啮合。
14.本发明提供了一种颗粒塑胶加工用具有摇动装置的振动式智能悬挂输送系统。具备以下有益效果:
15.(1)、该颗粒塑胶加工用具有摇动装置的振动式智能悬挂输送系统,通过旋转电机控制摇动仓转动实现振动撞击颗粒塑胶的目的,并且,在摇动仓循环小范围转动时,l型撞击杆循环撞击两个波浪形搅动板,提升摇动仓内的振动效果,与此同时,摇动仓循环转动的同时,两个气压仓一内的气囊一依次被挤压,使两个卡齿杆一分别通过两个齿轮一控制两个十字搅拌板转动,进一步提升摇动仓内的振动撞击效果。
16.(2)、该颗粒塑胶加工用具有摇动装置的振动式智能悬挂输送系统,通过设置筛选装置来筛选颗粒塑胶,符合规格的颗粒塑胶通过筛选板下落,而不符合规格的颗粒塑胶通过筛选板滑落至二次输送装置内,通过二次输送装置将不符合规格的颗粒塑胶再次送入摇动仓内进行振动抖散,从而避免颗粒塑胶黏在一起。
17.(3)、该颗粒塑胶加工用具有摇动装置的振动式智能悬挂输送系统,通过设置振动装置来提升筛选板的筛选效率,当旋转电机控制摇动仓工作的同时,通过传动带控制敲击杆循环小幅度转动,从而不断撞击筛选板,通过产生的振动来提升筛选板的筛选效率,与此同时,当敲击杆转动至右侧时,通过伸缩弹性压杆挤压气囊二,使其内部气体通过喷气管道喷出,使辅助振动杆二次撞击筛选板,进一步提升筛选板的筛选效率。
18.(4)、该颗粒塑胶加工用具有摇动装置的振动式智能悬挂输送系统,通过设置定量分装装置来定量分装颗粒塑胶,被筛选后的颗粒塑胶进入收集仓内,接着通过空心管道上端的开口进入转动块内部的贯穿通道内,随后启动线性电机,通过卡齿杆二控制齿轮转动,使转动块转动,转动块在转动的过程中与空心管道顶端开口错位,使其内颗粒塑胶数量不在增加,随着转动块的转动,其底部与空心管道底部开口重合,此时转动块贯穿通道内颗粒塑胶通过分装管道排出,实现定量分装的目的。
附图说明
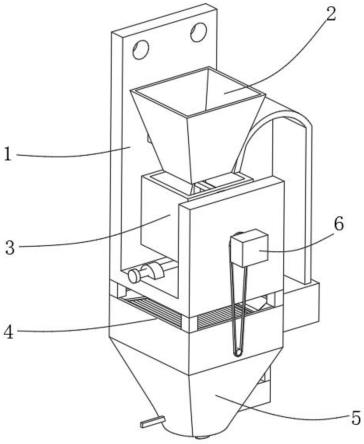
19.图1为本发明整体的三维结构示意图;
20.图2为本发明摇动装置的三维结构示意图;
21.图3为本发明摇动装置的剖视三维结构示意图;
22.图4为本发明筛选装置的双视角三维结构示意图;
23.图5为本发明振动装置的三维结构示意图;
24.图6为本发明定量分装装置的剖视三维结构示意图;
25.图7为本发明空心管道及其内部结构的三维剖视示意图。
26.图中:1、悬挂板;2、漏斗型进料仓;3、摇动装置;31、摇动仓;32、l型撞击杆;33、波浪形搅动板;34、气压仓一;35、十字搅拌板;36、密封板;4、筛选装置;41、筛选仓;42、二次输送装;43、连接管道;44、旋钮杆;45、筛选板;46、横板;47、凸轮;48、振动装置;481、支杆;482、敲击杆;483、旋杆;484、辅助振动杆;485、气囊二;486、喷气管道;5、定量分装装置;51、收集仓;52、线性电机;53、空心管道;54、分装管道;55、转动块;6、旋转电机。
具体实施方式
27.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
28.请参阅图1-7,本发明提供一种技术方案:一种颗粒塑胶加工用具有摇动装置的振动式智能悬挂输送系统,包括悬挂板1,悬挂板1的内部上端固定有漏斗型进料仓2,悬挂板1的内部转动连接有摇动装置3,摇动装置3包括摇动仓31、l型撞击杆32,摇动仓31的内部中端对称固定有两个波浪形搅动板33,摇动仓31的内部下端对称转动连接有两个十字搅拌板35,两个十字搅拌板35靠近气压仓一34的一端均固定有齿轮一,摇动仓31的外部错位固定有两个气压仓一34,两个气压仓一34的一端均固定有气囊一,两个气囊一分别位于弧形槽内的两侧,两个气压仓一34的另一端均滑动连接有卡齿杆一,且两个卡齿杆一分别与两个齿轮一啮合,l型撞击杆32固定在悬挂板1上,且l型撞击杆32贯穿且滑动连接在摇动仓31的内部,摇动仓31的底部排料管道内通过扭簧转轴转动连接有密封板36,悬挂板1的前端固定有旋转电机6,旋转电机6的转杆处与摇动仓31固定,摇动仓31的侧壁上开设有弧形槽。该颗粒塑胶加工用具有摇动装置的振动式智能悬挂输送系统,通过旋转电机6控制摇动仓31转动,实现振动撞击颗粒塑胶的目的,并且,在摇动仓31循环小范围转动时,l型撞击杆32循环撞击两个波浪形搅动板33,提升摇动仓31内的振动效果,与此同时,摇动仓31循环转动的同时,两个气压仓一34内的气囊一依次被挤压,使两个卡齿杆一分别通过两个齿轮一控制两个十字搅拌板35转动,进一步提升摇动仓31内的振动撞击效果。
29.进一步的是,悬挂板1的底部固定有筛选装置4,筛选装置4包括筛选仓41、二次输送装置42、连接管道43、旋钮杆44,筛选仓41的内部固定有筛选板45,二次输送装置42固定在筛选仓41的外部,二次输送装置42一端与筛选仓41连接,二次输送装置42的另一端位于摇动仓31上方,连接管道43贯穿且滑动连接在悬挂板1的底部,连接管道43的外部上端对称固定有横板46,且横板46与悬挂板1之间设置有弹片,连接管道43的内部固定有顶杆,筛选板45倾斜固定在筛选仓41的内部,旋钮杆44的末端固定有凸轮47,且旋钮杆44通过固定块转动连接在悬挂板1内壁底部,筛选仓41的内部下端设置有振动装置48。该颗粒塑胶加工用具有摇动装置的振动式智能悬挂输送系统,通过设置筛选装置4来筛选颗粒塑胶,符合规格的颗粒塑胶通过筛选板45下落,而不符合规格的颗粒塑胶通过筛选板45滑落至二次输送装置42内,通过二次输送装置42将不符合规格的颗粒塑胶再次送入摇动仓31内进行振动抖散,从而避免颗粒塑胶黏在一起。
30.更进一步的是,振动装置48包括支杆481、敲击杆482,敲击杆482通过旋杆483转动
连接在筛选仓41内部,敲击杆482的一端转动连接有辅助振动杆484,敲击杆482的另一端固定有气囊二485,气囊二485底部固定有喷气管道486,喷气管道486的出气口位于辅助振动杆484右侧,支杆481上固定有伸缩弹性压杆,旋杆483通过传动带与旋转电机6的转杆处传动连接。该颗粒塑胶加工用具有摇动装置的振动式智能悬挂输送系统,通过设置振动装置48来提升筛选板45的筛选效率,当旋转电机6控制摇动仓31工作的同时,通过传动带控制敲击杆482循环小幅度转动,从而不断撞击筛选板45,通过产生的振动来提升筛选板45的筛选效率,与此同时,当敲击杆482转动至右侧时,通过伸缩弹性压杆挤压气囊二485,使其内部气体通过喷气管道486喷出,使辅助振动杆484二次撞击筛选板45,进一步提升筛选板45的筛选效率。
31.值得注意的是,筛选仓41的底部固定有定量分装装置5,定量分装装置5包括收集仓51、线性电机52,收集仓51的内部固定有空心管道53,空心管道53的底部固定有两个分装管道54,空心管道53的内部转动连接有转动块55,转动块55的底部固定有齿轮二,空心管道53的顶端与底部均开设有两个开口,且顶端两个开口与底部两个开口呈错位状开设,转动块55的内部开设有两个贯穿通道,线性电机52固定在收集仓51的外部,且线性电机52的移动轴上固定有卡齿杆二,卡齿杆二贯穿收集仓51且与齿轮二啮合。该颗粒塑胶加工用具有摇动装置的振动式智能悬挂输送系统,通过设置定量分装装置5来定量分装颗粒塑胶,被筛选后的颗粒塑胶进入收集仓51内,接着通过空心管道53上端的开口进入转动块55内部的贯穿通道内,随后启动线性电机52,通过卡齿杆二控制齿轮转动,使转动块55转动,转动块55在转动的过程中与空心管道53顶端开口错位,使其内颗粒塑胶数量不在增加,随着转动块55的转动,其底部与空心管道53底部开口重合,此时转动块55贯穿通道内颗粒塑胶通过分装管道54排出,实现定量分装的目的。
32.使用时,首先将颗粒塑胶投放入漏斗型进料仓2内,随后输送进摇动仓31内,此时启动旋转电机6,使摇动仓31做左右循环小幅度转动,在摇动仓31循环小范围转动时,l型撞击杆32循环撞击两个波浪形搅动板33,提升摇动仓31内的振动效果,与此同时,摇动仓31循环转动的同时,由于l型撞击杆32固定不动,所以通过l型撞击杆32对两个气压仓一34内的气囊一依次被挤压,使两个卡齿杆一分别通过两个齿轮一控制两个十字搅拌板35转动,进一步提升摇动仓31内的振动撞击效果;
33.初步的振动撞击结束后,转动旋钮杆44,带动凸轮47转动,使凸轮47挤压横板46,使横板46带动连接管道43向上移动,使其与摇动仓31底部排料管道连接,此时连接管道43内部的顶杆会顶动密封板36转动,使摇动仓31内颗粒塑胶排出,使颗粒塑胶掉落在筛选板45上,当旋转电机6控制摇动仓31工作的同时,通过传动带控制旋杆483转动,旋杆483带动敲击杆482循环小幅度转动,从而不断撞击筛选板45,通过产生的振动来提升筛选板45的筛选效率,与此同时,当敲击杆482转动至右侧时,通过伸缩弹性压杆挤压气囊二485,使其内部气体通过喷气管道486喷出,使辅助振动杆484二次撞击筛选板45,进一步提升筛选板45的筛选效率,此时,符合规格的颗粒塑胶通过筛选板45下落,而不符合规格的颗粒塑胶通过筛选板45滑落至二次输送装置42内,通过二次输送装置42将不符合规格的颗粒塑胶再次送入摇动仓31内进行振动抖散,从而避免颗粒塑胶黏在一起;
34.被筛选后的颗粒塑胶进入收集仓51内,接着通过空心管道53上端的开口进入转动块55内部的贯穿通道内,随后启动线性电机52,通过卡齿杆二控制齿轮转动,使转动块55转
动,转动块55在转动的过程中与空心管道53顶端开口错位,使其内颗粒塑胶数量不在增加,随着转动块55的转动,其底部与空心管道53底部开口重合,此时转动块55贯穿通道内颗粒塑胶通过分装管道54排出,实现定量分装的目的。
35.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1