用于制造交叉板层预浸料材料的系统和方法
1.本公开总体上涉及复合材料,并且更具体地涉及用于自动制造交叉板层预浸渍复合材料的系统和方法。
背景技术:
2.复合零件的制造通常涉及层压纤维增强聚合物基体材料的多个层。每个层由用树脂预浸渍(例如,预浸料)的增强纤维组成。复合零件的每个层中的纤维通常以与相邻层的纤维角度不同的纤维角度定向,作为优化复合零件的强度和刚度特性并且提高固化的复合零件的质量的手段。例如,复合零件可以包括0度板层、以及通常包括-45度板层、+45度板层和90度板层的交叉定向板层。
3.单向预浸料是一种其中纤维平行于材料的纵向方向定向(即,0度纤维角度)的类型的预浸料。单向预浸带可具有连续的长度,并且支撑在背衬层上且卷绕在用于自动铺设设备的卷上。可获得具有不同宽度的单向预浸带的卷。例如,单向预浸带通常可具有高达12英寸或更大的宽度以用于自动铺带(atl)机中。
4.atl机在铺设长程单向预浸带以形成复合零件的0度板层方面非常有效。然而,在atl机中使用单向预浸带以铺设长复合零件的短程(例如,小于5英尺)交叉定向板层需要atl机在铺设每个交叉定向层时多次横穿零件。atl机铺设每个交叉定向板层所需的多次停止和启动显著增加了完成铺设过程所需的总时间量。此外,atl机在每个交叉定向板层的端部处需要留出过多的回转空间。
5.可以看出,在本领域中需要一种用在atl机中的在背衬层上制造连续长度的交叉定向预浸料材料的系统和方法,从而避免铺设横穿复合零件的许多短程。理想地,该系统能够制造多层交叉板层预浸料材料,诸如双层交叉板层预浸料(或三层交叉板层预浸料或四层交叉板层预浸料等),以进一步减少铺设复合零件的交叉定向层所需的时间量。
技术实现要素:
6.本公开解决了上述与交叉板层预浸料材料相关的需要,本公开提供了一种用于制造背衬交叉板层预浸料的制造系统。该制造系统包括切割机、粘合机和拾放系统。切割机包括切割站,该切割站构造成将连续长度的单向预浸料切割成预浸料区段。每个预浸料区段具有不平行于单向预浸料的纵向方向的一对相对的区段切割边缘。粘合机具有传送带和粘合站。拾放系统构造成从切割机拾取预浸料区段,并且将预浸料区段以首尾相连的关系放置在传送带上,且定向成使得区段切割边缘大体上平行于传送带的纵向方向。传送带构造成将预浸料区段供给到粘合站。粘合站构造成将预浸料区段粘合到连续长度的背衬材料,从而将预浸料区段从传送带传递到背衬材料,且产生连续长度的背衬交叉板层预浸料。
7.还公开了一种制造背衬交叉板层预浸料的方法。该方法包括:使用切割机的切割站将第一连续长度的单向预浸料切割成第一预浸料区段。如上文所提及的,每个预浸料区段具有不平行于单向预浸料的纵向方向的一对相对的区段切割边缘。该方法还包括:使用
拾放系统从切割机拾取第一预浸料区段,并且将第一预浸料区段以端对端的关系放置到粘合机的传送带上,且定向成使得区段切割边缘大体上平行于传送带的纵向方向。此外,该方法包括:使用传送带将第一预浸料区段供给到粘合机的粘合站,以及使用粘合站将第一预浸料区段粘合到连续长度的背衬材料。
8.另外公开了另一种制造背衬交叉板层预浸料方法,该方法包括使用切割机将第一连续长度的单向预浸料切割成第一预浸料区段。另外,该方法包括:使用拾放系统从切割机拾取第一预浸料区段,并且将第一预浸料区段以首尾相连的关系放置到粘合机的传送带上,且定向成使得区段切割边缘大体上平行于传送带的纵向方向。此外,该方法包括:使用传送带将第一预浸料区段供给到粘合机的粘合站。该方法还包括:使用粘合站将第一预浸料区段粘合至连续长度的背衬层,从而形成连续长度的中间背衬交叉板层预浸料。另外,该方法包括:使用粘合站将单向预浸料的第二连续长度或者第二预浸料区段的首尾相连系列粘合到中间背衬交叉板层预浸料的第一预浸料区段,从而产生最终的背衬交叉板层预浸料。
9.已讨论的特征、功能和优点可在本公开的各种实例中单独地实现,或者可以在其他实施例中组合,其进一步的细节可参考以下描述和下面的附图看出。
附图说明
10.通过参照附图,本公开的这些和其他特征将变得更加显而易见,其中,相同的标号自始至终表示相同的零件,并且其中:
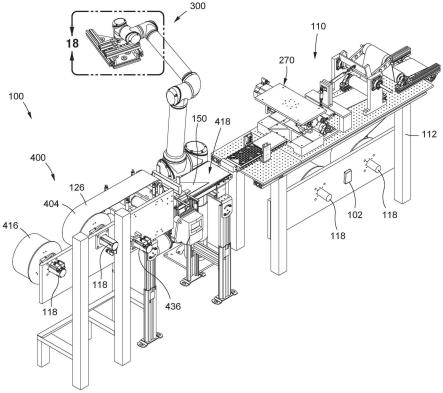
11.图1是用于从连续长度的单向预浸料(即,0度预浸料)开始自动制造连续长度的背衬交叉板层预浸料的制造系统的透视图;
12.图2是图1的制造系统的另一透视图,该制造系统包括切割机、拾放系统(例如,机器人装置)以及粘合机;
13.图3是图1和图2的制造系统的侧视图;
14.图4是切割机的实例的透视图,其示出了包括支撑在背衬层上的一卷单向预浸料的背衬单向预浸料滚筒,且进一步示出了用于在将单向预浸料从背衬单向预浸料滚筒拉出时收集背衬层的背衬层收集滚筒;
15.图5是图4的切割机的侧视图;
16.图6是切割机的由图4的参考标号6标识的部分的放大图,并且示出了气动摆动器;
17.图7是切割机的由图4的参考标号7标识的部分的放大图,并且示出了轧辊组件;
18.图8是切割机在其中背衬层收集滚筒邻近切割站定位的布置中的实例的侧视图;
19.图9是沿图8的线9-9截取的截面图;
20.图10是切割机的由图4的参考标号10标识的部分的放大图,并且示出了具有支撑安装在切割装置致动器上的切割装置的转台的切割站;
21.图11示出了图10的切割站,并且示出了经由转台相对于单向预浸料的纵向方向旋转至-45
°
的角度的切割装置和切割装置致动器;
22.图12示出了经由转台相对于单向预浸料的纵向方向旋转至+45
°
的角度的切割装置和切割装置致动器;
23.图13是构造成在由切割装置进行切割期间支撑单向预浸料的切割表面的实例的
透视图;
24.图14是图13的切割表面的实例的分解透视图,示出了上板、下板和构造成插入到形成在上板和下板中的凹槽中的牺牲性切割材料;
25.图15是具有预浸料夹具的区段输送系统的实例的透视图,该预浸料夹具构造为将每个预浸料区段从切割表面运输到区段拾取位置;
26.图16示出了将预浸料区段从原始位置输送至区段拾取位置的预浸料夹具;
27.图17示出了在将预浸料区段释放在区段拾取位置处之后返回至原始位置的预浸料夹具;
28.图18是图1的拾放系统(即,机器人装置)的一部分的放大图,并且示出了安装到机器人装置的机械臂的真空末端执行器的实例;
29.图19是图18的真空末端执行器的自上而下透视图;
30.图20是图18的真空末端执行器的自下而上透视图,并且示出了三个真空区(区a、b和c),这三个真空区能通过真空压力单独地启用以用于接合不同形状的预浸料区段;
31.图21是图18至图20的真空末端执行器的顶部示意图,并且示出了同时通过真空压力启用以真空拾取90度预浸料区段的区a和b;
32.图22是示出了真空末端执行器的顶部示意图,示出了同时通过真空压力启用以真空拾取-45度预浸料区段的区b和c;
33.图23是相对于图21中的定向旋转45
°
的真空末端执行器的顶部示意图,并且示出了同时通过真空压力启用以真空拾取+45度预浸料区段的区a和b;
34.图24是机器人装置以及切割机和粘合机的部分的顶视图,并且示出了切割机上的区段拾取位置处的-45度预浸料区段,并且还示出了具有真空末端执行器的机器人装置的实例;
35.图25示出了在切割机的区段拾取位置处拾取-45度预浸料区段的真空末端执行器;
36.图26示出了相对于图25中的定向旋转45
°
的真空末端执行器,并且示出了将-45度预浸料区段放置在粘合机上的真空末端执行器;
37.图27示出了粘合机的传送带上的-45度预浸料区段;
38.图28是粘合机的实例的透视图;
39.图29是图28的粘合机的侧视图;
40.图30是粘合机的由图28的参考标号30标识的部分的放大图,并且示出了构造为加热背衬材料和/或预浸料区段的加热装置的实例;
41.图31是粘合机的透视图,示出了包括背衬材料的卷的背衬材料滚筒的实例,该背衬材料示出为通过粘合机,并且还示出了用于收集将预浸料区段粘合到背衬材料所产生的背衬交叉板层预浸料的交叉板层材料收集滚筒;
42.图32是粘合机的由图28的参考标号32标识的部分的透视图,并且示出了构造成施加压实压力以将预浸料区段固化到背衬材料的初始压实台和二次压实台;
43.图33是粘合机的由图28的参考标号33标识的部分的透视图,并且示出了构造成在将背衬交叉板层预浸料卷绕到交叉板层材料收集滚筒上之前测量背衬交叉板层预浸料中的张力载荷的张力测定仪的实例;
44.图34是制造连续长度的背衬交叉板层预浸料的方法中包括的操作的流程图;
45.图35是经由切割机将90度预浸料区段从连续长度的单向预浸料切割、经由拾放系统重新定向并且经由粘合机粘合至最初没有预浸料材料的背衬层的示意图;
46.图36是将-45度预浸料区段从连续长度的单向预浸料切割且粘合到最初没有预浸料材料的背衬层的示意图;
47.图37是将+45度预浸料区段从连续长度的单向预浸料切割且粘合到最初没有预浸料材料的背衬层的示意图;
48.图38是将90度预浸料区段从第一连续长度的单向预浸料切割、重新定向且粘合到由背衬层背衬的第二连续长度的单向预浸料(即,0度预浸料)的示意图;
49.图39是将-45度预浸料区段从第一连续长度的单向预浸料切割且粘合到由背衬层背衬的第二连续长度的单向预浸料的示意图;
50.图40是将+45度预浸料区段从第一连续长度的单向预浸料切割且粘合到由背衬层背衬的第二连续长度的单向预浸料的示意图;
51.图41是将90度预浸料区段从连续长度(即,一卷)的单向预浸料(即,0度预浸料)切割、重新定向且粘合到连续长度的背衬交叉板层预浸料的示意图,该背衬交叉板层预浸料包括由背衬层背衬的一系列-45度预浸料区段;
52.图42是将-45度预浸料区段从连续长度的单向预浸料切割且粘合到连续长度的背衬交叉板层预浸料的示意图,该背衬交叉板层预浸料包括由背衬层背衬的一系列90度预浸料区段;
53.图43是将-45度预浸料区段从第一连续长度的单向预浸料切割且粘合到连续长度的背衬交叉板层预浸料的示意图,该背衬交叉板层预浸料包括由背衬层背衬的一系列+45度预浸料区段;
54.图44是将+45度预浸料区段从第一连续长度的单向预浸料切割且粘合到连续长度的背衬交叉板层预浸料的示意图,该背衬交叉板层预浸料包括由背衬层背衬的一系列-45度预浸料区段;
55.图45是将+45度预浸料区段从第一连续长度的单向预浸料切割且粘合到连续长度的背衬交叉板层预浸料的示意图,该背衬交叉板层预浸料包括由背衬层背衬的一系列90度预浸料区段;
56.图46是将90度预浸料区段从第一连续长度的单向预浸料切割且粘合到连续长度的背衬交叉板层预浸料的示意图,该背衬交叉板层预浸料包括由背衬层背衬的一系列+45度预浸料区段;
57.图47是将连续长度的单向预浸料(即,0度预浸料)粘合到连续长度的背衬交叉板层预浸料的示意图,该背衬交叉板层预浸料包括由背衬层背衬的一系列90度预浸料区段;
58.图48是连续长度的单向预浸料粘合到连续长度的背衬交叉板层预浸料的示意图,该背衬交叉板层预浸料包括由背衬层背衬的一系列-45度预浸料区段;
59.图49是连续长度的单向预浸料粘合到连续长度的背衬交叉板层预浸料的示意图,该背衬交叉板层预浸料包括由背衬层背衬的一系列+45度预浸料区段。
具体实施方式
60.现在参考示出本发明的优选和各种实例的附图,图1至图3中示出用于自动制造连续长度的背衬交叉板层预浸料416的制造系统100的实例。背衬交叉板层预浸料416包括支撑在背衬层126上的至少一层首尾相连预浸料区段150。制造系统100包括切割机110、粘合机400和拾放系统300。切割机110构造成支撑一卷连续长度的单向预浸料122。单向预浸料122(例如,单向预浸带)包括连续的增强纤维124(图24和图27),该连续的增强纤维相对于单向预浸料122的纵向方向以0度的纤维角度定向。增强纤维124用树脂预浸渍。增强纤维124可由多种材料中的任一种形成,诸如塑料、玻璃、陶瓷、碳、金属或其任何组合。树脂可以是热固性树脂或热塑性树脂,并且可以由多种有机或无机材料中的任何一种形成。单向预浸料122支撑在背衬层126上。背衬层126可以是纸材料和/或背衬层126可以是聚合物膜。
61.切割机110构造成从连续长度的单向预浸料122剥离背衬层126,并且将剥离的单向预浸料122供给到切割站230,在该切割站处,单向预浸料122被顺序地切割成预浸料区段150。每个预浸料区段150具有一对相对的区段侧边缘154(图15)和一对相对的区段切割边缘152(图15)。切割站230切割单向预浸料122,使得区段切割边缘152不平行于单向预浸料122的纵向方向。例如,如下所述,切割站230能够相对于单向预浸料122的纵向方向以-45度、+45度、90度或各种其他角度中的任一个的定向切割单向预浸料122。
62.粘合机400具有传送带418和粘合站420,并且该粘合机构造为支撑一卷连续长度的背衬材料404。如下所述,背衬材料404可包括类似于上述背衬层126的背衬层126,在切割成预浸料区段150之前,切割机110将该背衬层从单向预浸料122剥离。或者,背衬材料404可包括一卷背衬交叉板层预浸料416,其可由本公开的制造系统100预先制造,如下文所述。更进一步地,背衬材料404可包括连续长度(例如,一卷)的单向预浸料122。
63.拾放系统300构造成从切割机110顺序拾取预浸料区段150,并且将预浸料区段150以首尾相连的关系放置在移动的传送带418上。拾放系统300将预浸料区段150以一定向放置在传送带418上,使得预浸料区段150的区段切割边缘152彼此对准,且大体上平行于传送带418的纵向方向。一旦预浸料区段150放置在传送带418上,区段切割边缘152就变成由制造系统100生产的背衬交叉板层预浸料416的侧面。拾放系统300优选地将预浸料区段150以彼此不重叠的关系放置,且相邻的预浸料区段150之间的最大间隙为0.10英寸,但可调整制造系统100以适应首尾相连预浸料区段150之间的任何重叠要求或间隙要求。此外,拾放系统300优选地将预浸料区段150定向成使得预浸料区段150的纤维角度彼此平行。
64.传送带418构造成将一系列预浸料区段150供给到粘合站420。在一个实例中,传送带418以恒定速度移动,并且背衬材料404与传送带418同步地和/或以与传送带418相同的速度在传送带418上移动。粘合站420构造成将预浸料区段150粘合到连续长度的背衬材料404,从而将预浸料区段150从传送带418传递到背衬材料404,并且产生卷绕到滚筒上的连续长度的背衬交叉板层预浸料416,如下所述。在本公开中,背衬交叉板层预浸料416包含背衬层126和首尾相连系列的预浸料区段150的至少一层,该预浸料区段的增强纤维124定向为不平行于背衬交叉板层预浸料416的纵向方向。如图35至图37所示和下文所述,制造系统100具有制造单层背衬交叉板层预浸料416(即,单层首尾相连的预浸料区段150在背衬层126上限定交叉定向预浸料)的能力。此外,如图38至图49所示和下文所述,制造系统100具有制造双层背衬交叉板层预浸料416的能力,其中多层预浸料材料中的至少一层包括交叉
定向预浸料材料。虽然未在图中示出,但是制造系统100还具有在背衬层126上制造具有多于两层预浸料材料的背衬交叉板层预浸料416的能力。例如,制造系统100还具有在背衬层126上制造包含三层或更多层预浸料材料的背衬交叉板层预浸料416的能力。
65.如图1至图3所示,切割机110支撑在切割机框架112上。粘合机400定位成邻近切割机110,并支撑在粘合机框架402上。拾放系统300定位成邻近切割机110的下游端并且邻近粘合机400的上游端。在所示的实例中,拾放系统300是机器人装置302,如下面更详细描述的。然而,在未示出的其他实例中,拾放系统300可构造为门架系统,其构造成从切割机110拾取预浸料区段150、重新定向预浸料区段150并且将预浸料区段150放置到传送带418上。虽然未示出,但是制造系统100联接到和/或包括将各个部件互连并且能够实现制造系统100的操作的各种公用线路。此类公用线路可以包括气动线路、真空线路、压缩空气线路、数据和通信线路以及电力线路,为了附图的清晰起见,已经省略了所有这些线路。
66.在图1至图3的实例中,切割机110定位成与粘合机400对准,使得单向预浸料122通过切割机110的移动方向与传送带418的移动方向对准。如下所述,将切割机110与粘合机400对准允许生产连续长度的背衬交叉板层预浸料416的能力,该背衬交叉板层预浸料416具有第一层预浸料和第二层预浸料,该第一层预浸料包括背衬层126上的一系列预浸料区段150,该第二层预浸料包括在第一层预浸料区段150的顶部上的连续长度(即,未切割)的单向预浸料122(即,0度纤维角度)。在这方面,机器人装置302定位在制造系统100的侧面,以避免干扰单向预浸料122(即,未切割的)从切割机110传递到粘合机400。
67.然而,在未示出的其他实例中,制造机可构造成使得切割机110和粘合机400彼此不对准。例如,切割机110和粘合机400可并排定位,并且可定向成使得切割机110的下游端定位成紧邻粘合机400的上游端,以允许拾放系统300(例如,机器人装置302)容易地将预浸料区段150从切割机110传递到传送带418。然而,在这种并排布置中,不能将连续长度(即,未切割)的单向预浸料122从切割机110传递到粘合机400。
68.参考图4至图5,示出了切割机110的实例,该切割机包括构造成支撑背衬单向预浸料滚筒114的背衬单向预浸料卡盘116。背衬单向预浸料滚筒114构造成支撑一卷连续长度的单向预浸料122,该单向预浸料自身支撑在背衬层126上,如上所述。此外,切割机110包括构造成支撑背衬层收集滚筒132的背衬层收集卡盘134。背衬层收集滚筒132构造成在单向预浸料122供给通过切割机110从单向预浸料122上剥离背衬层126时收集背衬层126。背衬单向预浸料卡盘116和背衬层收集卡盘134各自通过卡盘伺服电机118(图1)可旋转地驱动。每个卡盘包括安装在卡盘的单独支腿上的气动夹具。当滚筒安装在卡盘上时,压缩空气被提供给气动夹具以推动气动夹具抵靠滚筒的内壁,从而将滚筒固定到卡盘。通过将压缩空气源与气动夹具分离来实现从卡盘移除滚筒。
69.切割机110包括多个辊(例如,惰辊182、摆动辊184等),以用于支撑单向预浸料122,并且促进单向预浸料122通过切割机110的方向变化。在制造系统100的一些实例中,辊可以各自包括从辊的柱形外表面突出的周向对准脊(未示出)。一对周向对准脊分别位于每个辊的相对端上。周向对准脊以与单向预浸料122的宽度相等的宽度间隔开,并且周向对准脊构造成当单向预浸料122移动通过切割机110时保持单向预浸料122的对准。粘合机400还可包括具有周向对准脊的辊(例如,惰辊182)。在粘合机400上,周向对准脊以与背衬材料404的宽度相等的距离间隔开,并且提供了用于在粘合期间保持背衬材料404与传送带418
上的预浸料区段150对准的手段。
70.参考图4至图7,切割机110包括轧辊组件200,该轧辊组件构造成拉动单向预浸料122通过切割机110,并且将预定长度的单向预浸料122供给到切割站230中。在所示的实例中,轧辊组件200具有相对的轧辊202,该相对的轧辊相对于彼此定位以便在这些轧辊202之间限定辊接合部210。在所示的实例中,轧辊202包括上轧辊204和下轧辊206。
71.轧辊组件200还包括具有旋转编码器(未示出)的轧辊伺服电机208。轧辊伺服电机208构造为可旋转地驱动下轧辊206。在所示实例中,下轧辊206为具有带纹理的外表面(例如,喷砂)的刚性柱体(例如,固态铝),该带纹理的外表面构造成与支撑单向预浸料122的背衬层126摩擦接合。上轧辊204可自由旋转且由较软的弹性材料形成,以用于支承单向预浸料122而不损坏材料。例如,上轧辊204可包括三元乙丙橡胶(epdm)橡胶或其他弹性材料。
72.轧辊组件200包括轧辊致动器212,该轧辊致动器可以包括气动驱动的线性致动器。轧辊致动器212在致动器安装支架196与轧辊支撑配件214(图7)之间延伸。轧辊致动器212构造成在关闭位置与打开位置之间使上轧辊204朝向和远离下轧辊206移动。在打开位置中,单向预浸料122可插入辊接合部210中,之后轧辊致动器212将上轧辊204向下移动到关闭位置,从而夹持到单向预浸料122上。当由制造系统100的控制器102(图1)提示时,启动轧辊伺服电机208以使下轧辊206旋转,从而将预定长度的单向预浸料122供给到切割站230中以切割成预浸料区段150。轧辊伺服电机208的旋转编码器提供了用于对从轧辊组件200延伸到切割站230中的预定长度进行计量的手段。
73.参考图4至图6,切割机110还包括位于背衬单向预浸料滚筒114与轧辊组件200之间的气动摆动器组件(dancer assembly)180。气动摆动器组件180构造成当轧辊组件200将单向预浸料122从背衬单向预浸料滚筒114拉出时在单向预浸料122上施加基本上恒定的张力载荷。对此,气动摆动器组件180在单向预浸料122上保持有限量的张力(例如,约10磅的力),并避免超过张力极限,以避免单向预浸料122的拉伸损坏。此外,单向预浸料122中的张力使得轧辊组件200能够将精确长度的单向预浸料122分配到切割站230中。
74.如图6所示,气动摆动器组件180包括一对惰辊182和摆动辊184。摆动辊184和惰辊182以这样的方式定位,即为移动通过气动摆动器组件180的单向预浸料122提供钝角环绕角,并且这允许精确地控制单向预浸料122上的张力载荷并防止单向预浸料122的磨损和其他损坏。气动摆动器组件180包括摆动臂(dancer arm)188和支撑摆动臂188的摆动器安装台186。摆动臂188枢转地联接到摆动器安装台186,并且该摆动臂具有辊安装部190和致动器安装部192。辊安装部190支撑摆动辊184。摆动器致动器194在致动器安装部192与致动器安装支架196之间延伸。在所示的实例中,摆动器致动器194是线性致动器,诸如低粘滞气缸。气动摆动器组件180包括旋转编码器(未示出),该旋转编码器将摆动臂188的位置输出至控制回路(未示出),以由此向摆动器致动器194提供反馈,以便在单向预浸料122中保持基本上恒定的张力。
75.参考图8至图9,示出了切割机110的替代布置,其中背衬层收集滚筒132定位成邻近切割站230。与图1至图5中其中背衬层收集滚筒132定位成紧邻背衬单向预浸料滚筒114的布置相反,图8至图9中的背衬层收集滚筒132位于轧辊组件200的下游和切割站230的上游,并构造成当单向预浸料122在进入切割站230之前离开轧辊组件200时从单向预浸料122剥离背衬层126。如图8至图9中所示,通过在离开轧辊组件200之后从单向预浸料122剥离背
衬层126,单向预浸料122从单向预浸料122从背衬单向预浸料滚筒114解绕的点到单向预浸料122在进入切割站230之前穿过轧辊组件200的点保持完全支撑在背衬层126上。通过恰好在进入切割站230之前将单向预浸料122支撑在背衬层126上,相对于图1至图5的背衬层收集滚筒132定位成紧邻背衬单向预浸料滚筒114的布置,对单向预浸料122的处理的稳定性和准确性得到改进。在图8至图9中,背衬层收集滚筒132经由卡盘支撑结构120支撑在切割站230上方。包括惰辊182(图8),以用于将背衬层126从轧辊组件200重新定向到背衬层收集滚筒132。如上所述,背衬层收集滚筒132由卡盘伺服电机118可旋转地驱动,如图9中所示。
76.参考图10至图13,示出了用于将连续长度的单向预浸料122切割成预浸料区段150的切割站230的实例。在所示的实例中,切割站230构造成将单向预浸料122切割成预浸料区段150(图15),该预浸料区段具有相对于单向预浸料122的纵向方向以-45度、+45度或90度定向的区段切割边缘152(图15)。为此,切割站230包括支撑在切割组件框架234上的切割组件232。切割组件232包括切割装置236和构造成支撑切割组件232的转台242(图10)。转台242构造成锁定切割装置236相对于单向预浸料122的纵向方向的定向。在所示的实例中,切割装置236悬挂在转台242下方。转台242具有用于将切割装置236的定向锁定在90度(图10)、+45度(图11)或-45度(图12)的棘爪244。然而,转台242可以包括相对于导向预浸料的纵向方向处于各种其他角度定向的任一种的棘爪244,这可以由制造系统100制造的背衬交叉板层预浸料416的期望纤维角度决定。
77.在图10至图12中,切割装置236示出为切割轮。然而,在其他实例中,切割装置236可构造为超声波装置、切割刀片或其他切割装置构造,其在切割单向预浸料122时提供高度准确性和可重复性。切割装置236联接到切割装置托架238。切割组件232包括切割装置致动器240,该切割装置致动器用于驱动切割装置236穿过单向预浸料122的宽度以便切割成预浸料区段150。在所示的实例中,切割装置致动器240是构造成气动空气滑动件的线性致动器(例如,气动驱动致动器)。然而,切割装置致动器240可以构造为螺旋驱动机构或其他致动器布置。
78.参考图13至图14,切割站230包括用于在切割期间支撑单向预浸料122的切割表面250。切割表面250可以是多孔的或可以具有多个孔,并且流体地联接至真空源,诸如压缩空气动力真空发生器、或者车间真空源或泵。向切割表面250施加真空压力用于将单向预浸料122真空联接至切割表面250,并且防止单向预浸料122在切割装置236切割期间的移动,这允许精确切割并降低损坏预浸料区段150的风险。
79.在图13至图14所示的实例中,切割表面250具有上板254和下板256。下板256包括腔室以及构造成接收上板254的凹部。上板254和下板256由刚性材料(例如,金属材料,诸如铝)形成,并且各自均包括凹槽258,该凹槽分别与由与转台242相关联的棘爪244限定的切割装置236的切割定向对准。凹槽258构造成接收牺牲性切割材料260,当切割单向预浸料122时,切割装置236支承该牺牲性切割材料。牺牲性切割材料260的实例包括但不限于诸如橡胶(例如,epdm)的无孔材料或诸如vyon
tm
的能够真空联接至单向预浸料122的多孔材料。
80.切割表面250可选地构造为流体地联接到加压空气源(例如,压缩空气源)以用于将空气从孔隙或多孔表面排出,作为用于迫使预浸料区段150远离切割表面250的手段。迫使预浸料区段150远离切割表面250防止对切割服务的粘滞,从而促进预浸料区段150从切割表面250滑动平移。
81.参考图15至图17,切割机110包括上述的区段拾取位置286,在该位置中,每个预浸料区段150可由拾放系统300拾取。为此,切割机110包括区段输送系统270,该区段输送系统构造成将每个预浸料区段150从切割表面250运输到区段拾取位置286。在区段拾取位置286处,预浸料区段150处于为拾放系统300拾取预浸料区段150提供间隙的可公开接近位置。区段输送系统270位于切割表面250的正下游。
82.在图15至图17中,区段输送系统270包括区段夹持系统272,该区段夹持系统包括一对预浸料夹具274,该一对预浸料夹具构造成在通过切割装置236切割以产生预浸料区段150之前夹持在单向预浸料122的下游部分的侧边缘上。每个预浸料夹具274具有用于在夹持位置(图15至图16)与松开位置(图17)之间竖直地移动预浸料夹具274的预浸料夹具致动器276。预浸料输送系统包括邻近切割表面250定位的输送系统支撑台282和位于输送系统支撑台282下游的输送系统真空台284。输送系统支撑台282构造成在将单向预浸料122切割成预浸料区段150之前和之后支撑单向预浸料。输送系统真空台284构造成流体地联接到真空源,以用于在由区段输送系统270运输之后将每个预浸料区段真空联接到区段拾取位置286。
83.每个预浸料夹具274均支撑在线性导轨278上。此外,区段夹持系统272包括夹具运输器致动器280,例如线性致动器(例如,气动驱动致动器)。夹具运输器致动器280经由运输器基板288联接至预浸料夹具274,该运输器基板位于输送系统支撑台282和输送系统真空台284下方。运输器基板288在一对预浸料夹具274的下部之间延伸并且该一对预浸料夹具的下部互连。在将单向预浸料122真空联接到切割表面250之前,夹具运输器致动器280构造成将少量的张力(例如,小于10磅的力)施加到单向预浸料122,作为消除任何松弛的手段。轧辊组件200抵抗由夹具运输器致动器280施加到单向预浸料122的张力载荷。一旦向单向预浸料122施加张力载荷,则在切割表面250处启用真空压力,之后夹具运输器致动器280被禁用,从而停止向单向预浸料122施加张力。切割装置236然后被驱动穿过单向预浸料122,从而产生预浸料区段150。
84.在切割单向预浸料122之后,预浸料夹具274保持夹持到预浸料区段150。在切割表面250处停用真空压力,并且夹具运输器致动器280沿着线性导轨278移动区段夹具,从而将每个预浸料区段150从切割站230运输至区段拾取位置286(图15至图16),该区段拾取位置可占据输送系统真空台284的至少一部分。一旦到达区段拾取位置286,则在输送系统真空台284处启用真空压力,以将预浸料区段150固定到位,并且预浸料夹具274向上移动到松开位置中。夹具运输器致动器280使预浸料夹具274返回至输送系统支撑台282(图15),以准备好当通过轧辊组件200供给到切割站230中时夹持在单向预浸料122的另一个下游部分上。
85.参考图1至图3和图18至图27,示出了构造为机器人装置302的拾放系统300的实例。然而,在未示出的另一实例中,拾放系统可以包括高架门架。如图18至图27中所示,机器人装置302具有机械臂304,该机械臂构造成在区段拾取位置286(图24至图25)处顺序地拾取预浸料区段150,并且将预浸料区段150以彼此端对端的关系放置在传送带418上,并且定向成使得预浸料区段150的区段切割边缘152彼此对准且平行于传送带418的纵向方向。
86.如图18至图27中所示,机械臂304包括构造成用于真空联接到预浸料区段150的真空末端执行器306。真空末端执行器306包括具有多孔表面的真空充气室(vacuum plenum)308(图19至图20),诸如具有多个小孔(例如,50-90微米的孔径)的vyon片。真空充气室308
分成两个或更多个(例如,三个)真空区310(图20至图23),这些真空区成形为与由切割站230切割的预浸料区段150的形状互补。真空充气室308包括刚性充气室框架312,以支撑真空充气室308。如图18所示,充气室框架312构造成经由充气室适配器配件314附接到机械臂304。真空充气室308的真空区310(图19至图20)中的每个流体地联接到真空源(如压缩空气动力真空发生器)或中央车间真空。真空区310可通过真空压力单独地启用,以允许真空末端执行器306接合预浸料区段150的不同形状。
87.在图21至图23的示例性真空末端执行器306中,真空充气室308包括真空区a、真空区b和真空区c,并且这些真空区根据单向预浸料122(即,输入材料)的宽度等于背衬交叉板层预浸料416(即,输出材料)的宽度的情况特定地成形和构造。例如,单向预浸料122的宽度可以是6英寸,并且背衬交叉板层预浸料416的宽度也可以是6英寸。然而,例如,在单向预浸料122的宽度(例如,12英寸)不同于背衬交叉板层预浸料416的宽度(例如,6英寸)的情况下,真空区的形状将与图21至图23中所示的真空区不同。
88.图21示出了-90度预浸料区段160、以及用于将真空末端执行器306真空联接至90度预浸料区段160的真空区a和b的启用。图22示出了-45度预浸料区段162以及用于将真空末端执行器306真空联接至-45度预浸料区段162的真空区b和c的启用。图23示出了+45度预浸料区段164、以及真空末端执行器306的重新定向,以用于将真空末端执行器306真空联接至+45度预浸料区段164。
89.图24示出了在切割机110的区段拾取位置286处的-45度预浸料区段162。图25示出了机械臂304将真空末端执行器306定位在-45度预浸料区段162上以用于真空接合。图26示出了机械臂304将-45度预浸料区段162重新定向,并且将-45度预浸料区段162放置在传送带418上,使得区段切割边缘152平行于传送带418的纵向方向。图27示出了在从真空末端执行器306释放之后传送带418上的-45度预浸料区段162。
90.在制造系统100的实例中,传送带418构造成以恒定速度移动,并且拾放系统300(例如,机械臂304)构造成在将预浸料区段150放置在传送带418上时匹配传送带418的速度。对此,制造系统100生产背衬交叉板层预浸料416的速度由传送带418的速度决定,该传送带可以使用制造商提供的驱动器和控制器单独地驱动和控制。
91.在所示的实例中,传送带418是真空传送带,该真空传送带构造成流体地联接到真空源(未示出),以用于一旦由拾放系统300放置就将预浸料区段150不可移动地固定到真空传送带。对此,用于将第一预浸料区段156放置在传送带418上的目标可名义上设定为传送带418上的全局x,y坐标位置。一旦第一预浸料区段156放置在传送带418上,传送带418就开始运动,并且拾放系统300以首尾相连的关系将预浸料区段150连续地放置在移动的传送带418上。传送带418可包括安装到传送带轴(未示出)的旋转编码器,以用于确定预浸料区段150何时已移动了适当距离以允许放置下一个预浸料区段150。机器人装置302可以被编程为跟随传送带418短距离以便匹配传送带418的速度。一旦速度匹配,末端执行器将预浸料区段150放置在传送带418上,且真空压力从真空末端执行器306分离,从而将预浸料区段150传递到传送带418。
92.虽然未示出,但是制造系统100可进一步包括用于提高预浸料区段150的拾取和放置的准确度的视觉系统。视觉系统可包括成像装置(例如,相机),该成像装置构造成对区段拾取位置286处的每个预浸料区段150成像,并且将相对于区段拾取位置286处的预浸料区
段150的标称位置和标称定向的实际位置(例如,在x、y坐标中)和定向(例如,在角度中)传输到控制器102。控制器102构造成以补偿实际位置/定向与标称位置/定向之间的差异的方式控制机器人装置302,以在区段拾取位置286处将末端执行器更好地对准预浸料区段150。对此,视觉系统可促进提高拾放系统300将每个预浸料区段150放置在传送带418上的准确性。视觉系统可安装在制造系统100上的各个位置中的任一个处。例如,视觉系统可安装在机械臂304上、末端执行器上、切割机110上区段拾取位置286上方和/或下方的位置处和/或粘合机400上预浸料区段150放置在传送带418上的位置上方。
93.现在参考图28至图33,示出了粘合机400的实例。如上文所提及,粘合机400构造成以将预浸料区段150从传送带418传递到背衬材料404的方式将预浸料区段150顺序地粘合到背衬材料404。对此,背衬材料404中预浸料区段150之间的粘合力大于将预浸料区段150联接到传送带418的真空力,使得每个预浸料区段150逐渐粘合到背衬材料404,同时逐渐从与传送带418的真空接合中释放,并且由此得到连续长度的背衬交叉板层预浸料416。如下文更详细描述的,粘合机400构造成在特定的张力下将背衬交叉板层材料卷绕到交叉板层材料收集滚筒412上。
94.参考图28至图29和图33,粘合机400包括构造成支撑背衬材料滚筒408的背衬材料卡盘410。背衬材料滚筒408支撑一卷背衬材料404。背衬材料404从背衬材料滚筒408解绕,并且以与传送带418相同的速度供给通过粘合机400。粘合机400还包括构造成支撑交叉板层材料收集滚筒412的交叉板层材料收集卡盘414。交叉板层材料收集滚筒412构造成收集将预浸料区段150粘合到背衬材料404所产生的背衬交叉板层预浸料416。背衬材料卡盘410和交叉板层材料收集卡盘414各自具有卡盘伺服电机118(图1),以用于可旋转地驱动背衬材料卡盘410和交叉板层材料收集卡盘414。
95.参考图31,粘合机400可包括至少一个惰辊182,以用于在背衬材料404从背衬材料滚筒408解绕时重新定向背衬材料。虽然未示出,但惰辊182可包括一对周向对准脊,该一对周向对准脊以与背衬材料404的宽度相等的距离间隔开。如上文关于切割机110的辊所述,粘合机400的惰辊182上的周向对准脊提供了用于保持背衬材料404与传送带418上的预浸料区段150的对准的手段,从而防止预浸料区段150悬于背衬材料404的边缘之上。
96.参考图30至图32,制造系统100包括至少一个压实台425,该压实台构造成抵靠预浸料区段150压实背衬材料404,以用于将预浸料区段150传递到背衬材料404。例如,图32示出了初始压实台426和二次压实台430,它们各自构造成对预浸料区段150施加压实压力以抵靠背衬材料404。在图31至图32中,已移除了初始压实台426和二次压实台430的一侧上的多个结构支撑件(例如,见图28至图30),以更好地示出压实台426、430的部件。
97.在图30至图32中,初始压实台426位于传送带418的下游端的上游。初始压实台426具有初始压实辊428,该初始压实辊构造成对背衬材料404施加初始压实压力以抵靠传送带418上的预浸料区段150。初始压实台426包括分别位于初始压实辊428的相对端上的一对压实致动器438(例如,线性气动致动器),以用于竖直地施加初始压实辊428的压实压力以抵靠支撑在传送带418上的预浸料区段150。
98.参考图32,二次压实台430位于传送带418的下游端的下游。二次压实台430具有上压实辊432和下压实辊434,该上压实辊和下压实辊相对于彼此竖直地定位以限定辊接合部210。上压实辊432相对于下压实辊434的竖直定位消除了可引起水平分量的水平力的可能
性,否则该水平分量将引起预浸料区段150与背衬材料404之间的接合部处的滑动。
99.二次压实台430包括分别位于上压实辊432的相对端上的一对压实致动器438(例如,线性气动致动器),以用于朝向和远离下压实辊434竖直地移动上压实辊432,以调节辊接合部210处的间隙的尺寸。辊接合部210接收来自初始压实台426的背衬交叉板层预浸料416,并且以增加预浸料区段150与背衬材料404的粘合的方式施加预浸料区段150的二次压实压力以抵靠背衬材料404。初始压实台426的初始压实辊428以及二次压实台430的上压实辊和下压实辊432、434可以具有由诸如橡胶(例如,epdm)的弹性材料形成的外表面以适应压实力的潜在非均匀施加,并且因此可以避免在压实以抵靠背衬材料404期间损坏预浸料区段150。
100.有利地,初始压实台426和二次压实台430提供了两个单独的位置,在这些位置中预浸料区段150被压实以抵靠背衬材料404。对此,两个单独的压实台425使预浸料区段150和背衬材料404处于压实期间的停留时间加倍,从而减少在任何一个压实台对过度压实的需要,并且相应地减少损坏预浸料材料的可能性。此外,将二次压实台430定位在传送带418的下游解决了在预浸料区段150从传送带418的真空释放之后预浸料区段150失去与背衬材料404的粘合的可能性。对此,二次压实台430确保了在将背衬交叉板层预浸料416卷绕到交叉板层材料收集滚筒412上时预浸料区段150保持粘合到背衬材料404。此外,两个单独的压实台425提供了用于改变初始压实台426和二次压实台430处施加的压实压力的手段。对此,初始压实辊428施加的初始压实力的大小可能由于传送带418的结构的偏离而受到限制。在这种情况下,二次压实台430可以施加增加量的压实压力,以补偿初始压实台426处减少的压实压力。
101.在图32中,下压实辊434通过压实辊伺服电机436(图1)可旋转地驱动,以用于拉动背衬材料404通过粘合站420。压实辊伺服电机436设定拉动背衬材料404通过粘合机400的速度,该速度等于传送带418的速度,从而消除预浸料区段150与背衬材料404之间的接合部处的滑动的可能性,否则该滑动可能危害背衬交叉板层预浸料416的质量。虽然未示出,但是背衬材料卡盘410可以包括制动器,该制动器构造成在二次压实台430停止拉动背衬材料404通过粘合站420的情况下停止背衬材料滚筒408的旋转。
102.参考图28至图30,粘合机400进一步包括一个或多个加热装置440,该加热装置构造为加热背衬材料404和/或预浸料区段150,作为增加预浸料区段150到背衬材料404的粘合的手段。在所示的实例中,粘合机400包括支撑在加热装置支撑框架444上的一个或多个加热装置440。加热装置440位于传送带418上方和粘合站420的上游。加热装置440构造成加热预浸料区段150,作为增加预浸料区段150中的树脂的粘性和/或稍微降低树脂粘度的手段,所有这些促进与背衬材料404的粘合。
103.在一个实例中,加热装置440是构造为红外加热器灯泡的红外发射器442。红外发射器442位于距预浸料区段150和背衬材料404一间隔距离处,从而避免否则使用需要与预浸料区段150或背衬材料404直接接触的加热装置将发生的污染。有利地,红外发射器442允许精确控制施加到预浸料区段150和背衬材料404上的热量,以避免损坏预浸料区段150或背衬材料404。此外,红外加热器允许将热量精确地集中到它们所瞄准的表面上,由此避免加热附近部件所导致的不利影响,诸如堆积在间接加热的部件上的过量树脂。在所示的实例中,粘合机400包括向下面向传送带418上的预浸料区段150的第一陶瓷红外加热器、以及
在与传送带418上的预浸料区段150接触之前水平面向背衬材料404的第二陶瓷红外加热器。
104.参考图30至图31和图33,粘合机400包括至少一个张力测定仪422,该至少一个张力测定仪构造成测量背衬材料404和/或背衬交叉板层预浸料416中的张力载荷。在所示的实例中,张力测定仪422各自包括具有柱形表面的悬臂式载荷传感器424,该柱形表面构造成基于施加到该柱形表面的侧向力来测量张力载荷。例如,如图29至图31所示,粘合机400包括位于惰辊182和第一压实辊之间的载荷传感器424,以用于在从背衬材料滚筒408解绕之后且在与预浸料区段150接触之前测量背衬材料404中的张力。图28至图29、图31和图33示出了在二次压实台430与交叉板层材料收集滚筒412之间的载荷传感器424,以用于在卷绕到交叉板层材料收集滚筒412上之前测量背衬交叉板层预浸料416中的张力。
105.每个载荷传感器424构造为将张力测量结果传输至控制器102,该控制器使用张力测量结果来控制滚筒的扭矩载荷,作为用于将背衬材料404中和背衬交叉板层预浸料416中的张力载荷保持在预定范围内的手段。例如,控制器102使用来自惰辊182和第一压实辊之间的载荷传感器424的张力测量结果来控制背衬材料卡盘410的卡盘伺服电机118,以将背衬材料404上的张力载荷保持在预定载荷范围内的方式调节背衬材料滚筒408上的扭矩载荷。控制器102使用来自二次压实台430和背衬交叉板层材料收集滚筒412之间的载荷传感器424的张力测量结果来控制交叉板层材料收集卡盘414的卡盘伺服电机118,以将背衬交叉层预浸料416上的张力载荷保持在预定载荷范围(例如,25-30磅的力)内的方式调节交叉板层材料收集滚筒412上的扭矩载荷。
106.参考图34,示出了制造一卷连续长度的背衬交叉板层预浸料416的方法500中包括的操作的流程图。方法500包括:将第一连续长度的单向预浸料128(例如,单向预浸带)支撑在背衬单向预浸料滚筒114上。如上所述,第一连续长度的单向预浸料128由背衬层126(诸如背衬纸或聚合物膜)背衬。该方法包括:将背衬层126与第一连续长度的单向预浸料128分离,同时将单向预浸料128供给到切割站230中。另外,该方法包括:在从第一连续长度的单向预浸料128剥离背衬层126时,在背衬层收集滚筒132上收集背衬层126。
107.方法500还包括:将单向预浸料128接收在轧辊组件200的相对轧辊202的辊接合部210内,并且使用轧辊202将单向预浸料128的纵向区段供给到切割机110的切割站230中。如上所述,轧辊组件200具有限定辊接合部210的上轧辊204和下轧辊206。上轧辊204可经由轧辊致动器212移动以调节辊接合部210的间隙,以用于接收和夹持到单向预浸料128上。轧辊伺服电机208可旋转地驱动下轧辊206,使得预定长度的单向预浸料128供给到切割站230中以切割成预浸料区段150。方法500还包括:在轧辊组件200将单向预浸料128供给到切割站230中时在单向预浸料128上施加基本上恒定的张力载荷。单向预浸料128中的基本上恒定的张力载荷由气动摆动器组件180控制,该气动摆动器组件位于背衬单向预浸料滚筒114与轧辊组件200之间。
108.如图8至图9中所示且如上所述,背衬层收集滚筒132可任选地定位成邻近切割站230,这与图1至图5中所示的其中背衬层收集滚筒132定位成紧邻背衬单向预浸料滚筒114的布置相反。在图8至图9中,从第一连续长度的单向预浸料128分离背衬层126的步骤包括:当单向预浸料128在进入切割站230之前离开轧辊组件200时,从单向预浸料128分离背衬层126。背衬层126被收集在背衬层收集滚筒132上,该背衬层收集滚筒位于轧辊组件200的下
游和切割站230的上游。如上所述,图8至图9中所示的布置提高了单向预浸料128在穿过切割机110时被控制的稳定性和准确度。
109.方法500的步骤502包括:使用切割站230将第一连续长度的单向预浸料128切割成第一预浸料区段156。第一预浸料区段156中的每个具有不平行于单向预浸料122的纵向方向的一对相对的区段切割边缘152。切割单向预浸料128的步骤502包括:切割单向预浸料128,使得区段切割边缘152相对于单向预浸料128的纵向方向以+45度、-45度、90度或其他角度定向。为此,切割单向预浸料128的步骤502包括:经由切割站230的转台242锁定切割装置236(例如,切割轮、超声装置)相对于单向预浸料128的纵向方向的定向。如上所述,转台242具有用于锁定切割装置236的定向的棘爪244。步骤502还包括:使切割装置236在单向预浸料128的宽度上平移,以将单向预浸料128切割成预浸料区段150。在所示的实例中,切割组件232包括切割装置致动器240,该切割装置致动器构造成用于使切割装置236在单向预浸料128的宽度上平移的气动空气滑动件。
110.切割第一连续长度的单向预浸料128的步骤502另外包括:经由真空压力将单向预浸料128固定到切割站230的切割表面250。如上所述,切割表面250是多孔的或具有流体地联接到真空源的多个孔。每当轧辊组件200将预定长度的单向预浸料128延伸到切割站230中时,启用真空源,以将预浸料真空联接至切割表面250,以用于在由切割装置236进行切割期间将单向预浸料128固定到位。
111.该方法包括:使用预浸料夹具274夹持到单向预浸料128的相对侧上,并且经由区段输送系统270的夹具运输器致动器280(例如,线性气动致动器)向单向预浸料128施加张力。一旦施加张力,则然后向切割表面250施加真空压力,以将单向预浸料128固定到切割表面250,之后停用夹具运输器致动器280,以停止在单向预浸料128上施加张力。然后驱动切割装置236穿过单向预浸料128,以产生预浸料区段150。在切割单向预浸料128之后,预浸料夹具274保持夹持在预浸料区段150上,并且停用切割表面250处的真空压力,以允许预浸料区段150从切割表面250平移。在一些实例中,切割表面250可从切割表面250的孔或多孔表面排出压缩空气,以促使预浸料区段150远离切割表面250,并且促进预浸料区段150从切割表面250滑动平移。
112.方法500还包括:使用区段输送系统270将每个预浸料区段150从切割表面250输送至区段拾取位置286以由拾放系统300拾取。如上所述,区段输送系统270位于切割表面250的正下游。运输每个预浸料区段150包括经由夹具运输器致动器280沿着一对线性导轨278移动预浸料夹具274,从而将每个预浸料区段150运输至区段拾取位置286。一旦到达区段拾取位置286,则向输送系统真空台284施加真空压力,以将预浸料区段150在区段拾取位置286处固定到位,并且随后将预浸料夹具274移动到松开位置。然后,夹具运输器致动器280将预浸料夹具274平移回输送系统支撑台282,以准备夹持由轧辊组件200供给到切割站230中的单向预浸料128的另一个下游部分。
113.方法500的步骤504包括:使用拾放系统300在区段拾取位置286处顺序地拾取第一预浸料区段156,并将第一预浸料区段156以首尾相连的关系放置到传送带418上,并且定向成使得区段切割边缘152大体上平行于传送带418的纵向方向。在图中所示的实例中,拾取第一预浸料区段156的步骤504包括:使用机器人装置302的机械臂304拾取每个预浸料区段150。然而,在未示出的其他实例中,预浸料区段150可由高架门架系统或其他能够将预浸料
区段150从切割机110传递至粘合机400的机构拾取。
114.在所示实例中,拾取第一预浸料区段156的步骤504包括:使用真空充气室308将每个预浸料区段150真空联接到机械臂304。如上所述,真空充气室308具有联接至真空源的多孔表面。将每个预浸料区段150真空联接到机械臂304包括:将真空充气室308定位于预浸料区段150上方区段拾取位置286处,并且基于预浸料区段150的形状向一个或多个真空区310施加真空压力。在图21至图23的上述实例中,真空充气室308包括真空区a、b和c。如上所述,真空区310中的每个单独地流体联接到真空源,以使得能够单独地向真空区310的任何组合提供真空压力,以使得能够真空接合到预浸料区段150的不同形状。
115.为了促进在拾取之前将真空末端执行器306与预浸料区段150对准,方法500可包括:使用视觉系统(例如,相机-未示出)对区段拾取位置286处的每个预浸料区段150成像,并且基于成像将机械臂304索引到预浸料区段150,如上所述。作为安装在机械臂304上的替代方案,视觉系统可在区段拾取位置286上方和/或下方的位置处安装至切割机110。另外,视觉系统(例如,相机)可在预浸料区段150放置在传送带418上的位置上方安装到粘合机400。
116.方法500的步骤506包括:使用传送带418将第一预浸料区段156供给到粘合机400的粘合站420。如上所述,将第一预浸料区段156供给到粘合站420的步骤506包括:以恒定速度移动传送带418,并且在将预浸料区段150放置在传送带418上时使拾放系统300(例如,真空末端执行器306)的速度与传送带418的速度匹配。为了防止一旦放置在传送带418上预浸料区段150就移动,将第一预浸料区段156供给到粘合站420的步骤506包括:将第一预浸料区段156真空联接到真空传送带。
117.方法500的步骤508包括:使用粘合站420将第一预浸料区段156顺序地粘合到连续长度的背衬材料404。第一预浸料区段156与传送带418的真空联接可防止第一预浸料区段156在粘合到背衬材料404时移动。粘合第一预浸料区段156的步骤508包括:将背衬材料404从背衬材料滚筒408解绕,并且将背衬材料404供给到传送带418上。当背衬材料404从背衬材料滚筒408解绕并且预浸料区段150粘合到背衬材料404时,该方法包括:将得到的背衬交叉板层预浸料416收集到交叉板层材料收集滚筒412上。如上所述,背衬材料滚筒408和交叉板层材料收集滚筒412均由卡盘伺服电机118可旋转地驱动。
118.将第一预浸料区段156粘合到背衬材料404的步骤508包括:使用至少一个压实台425压实背衬材料404以抵靠预浸料区段150,以使预浸料区段150粘合到背衬材料404,并且得到连续长度的背衬交叉板层预浸料416。在所示的实例中,压实背衬材料404以抵靠预浸料区段150包括:向背衬材料404施加初始压实压力以抵靠支撑在传送带418上的预浸料区段150。在位于传送带418的下游端的上游的初始压实台426处使用初始压实辊428施加初始压实压力。在施加初始压实压力之后,该方法另外包括:施加使背衬材料404和预浸料区段150彼此抵靠的二次压实压力。如上所述,在位于传送带418的下游端的下游的二次压实台430处,在夹在上压实辊432和下压实辊434之间的背衬交叉板层预浸料416上施加二次压实压力。
119.方法500还包括:可旋转地驱动上压实辊432和/或下压实辊434,以拉动背衬材料404通过粘合站420。作为安全预防措施,方法500可以包括:如果二次压实台430停止拉动背衬材料404通过粘合站420,则使用背衬材料卡盘410的制动器停止背衬材料滚筒408的旋
转。在所示的实例中,下压实辊434由压实辊伺服电机436可旋转地驱动,该压实辊伺服电机构造成以与传送带418相同的速度拉动背衬材料404通过粘合站420。通过在两个单独的压实台施加压实压力,预浸料区段150和背衬材料404在压实期间的停留时间的总量相对于其中依赖于单个压实台来压实预浸料区段150以抵靠背衬材料404的构造(未示出)加倍。
120.为了促进预浸料区段150与背衬材料404的粘合,方法500还包括:在压实之前使用至少一个加热装置440加热背衬材料404和/或预浸料区段150。使用定位在传送带418上方的一个或多个加热装置440来执行加热背衬材料404。在一个实例中,加热背衬材料404可包括使用一个或多个红外发射器442加热背衬材料404。例如,第一陶瓷红外加热器可向下面向传送带418上的预浸料区段150。在与传送带418上的预浸料区段150接触之前,第二陶瓷红外加热器可水平地面向背衬材料404。
121.方法500还包括使用至少一个张力测定仪422来测量背衬材料404中的张力载荷和/或背衬交叉板层预浸料416中的张力载荷。例如,背衬材料404中的张力载荷可使用具有柱形外表面的载荷传感器424测量,该载荷传感器构造成在接触预浸料区段150之前在背衬材料404从背衬材料滚筒408解绕时支承背衬材料404。可以使用位于二次压实台430与交叉板层材料收集滚筒412之间的类似载荷传感器424来测量背衬交叉板层预浸料416中的张力载荷。有利地,张力测定仪422允许控制器102控制卡盘伺服电机118以调节背衬材料滚筒408和交叉板层材料收集滚筒412上的扭矩载荷量,作为将张力载荷保持在预定限制内的手段。
122.参考图35至图49,示出了用于制造背衬交叉板层预浸料416的不同定向组合的工序的示意图。图35至图37表示用于制造背衬交叉板层预浸料416的3种不同定向的工序,该背衬交叉板层预浸料具有支撑在背衬层126上的单层预浸料材料(即,背衬层126上的单层交叉定向预浸料材料)。图38至图49表示用于制造背衬交叉板层预浸料416的12种不同定向的工序,该交叉板层预浸料具有支撑在背衬层126上的两层预浸料材料,并且其中该多层预浸料材料中的至少一层包括交叉定向预浸料材料(即,增强纤维不平行于背衬交叉板层预浸料416的纵向方向)。
123.在图35至图37中,3个工序中的每个涉及上述步骤502、504和506。该工序的步骤508包括:将第一预浸料区段156粘合到没有预浸料材料的连续长度的背衬层126。图35示出了经由切割机110从第一连续长度的单向预浸料128切割预浸料区段150,经由拾放系统300重新定向,并且作为90度预浸料区段160放置在粘合机400上,之后由一个或多个压实台425施加压实压力以用于将90度预浸料区段160粘合到背衬层126,且得到90度背衬预浸料450。图36示出了从第一连续长度的单向预浸料128切割-45度预浸料区段162,重新定向并且放置在粘合机400上,并且然后经由压实台粘合至背衬层126,并且得到-45度背衬预浸料452。图37示出了从第一连续长度的单向预浸料128切割+45度预浸料区段164,重新定向并放置在粘合机400上,然后经由压实台粘合到背衬层126,并得到+45度背衬预浸料454。
124.参考图38至图49,分别表示的12个工序中的每个涉及上述步骤502、504和506。图38至图40表示其中步骤508包括使用粘合站420将第一预浸料区段156粘合至连续长度的预浸料背衬组件406的工序,预浸料背衬组件406包括由背衬层126背衬的预浸料材料。图38示出了经由切割机110从第一连续长度的单向预浸料128切割预浸料区段150,经由拾放系统300重新定向,并且作为90度预浸料区段160放置在粘合机400的传送带418上,之后通过一
个或多个压实台425施加压实压力,以用于将90度预浸料区段160粘合至由背衬层126背衬的第二连续长度的单向预浸料130(即,0度预浸料),并且得到0/90度背衬预浸料456,其中,该0度预浸料夹在背衬层126与90度预浸料之间。图39示出了从第一连续长度的单向预浸料128切割-45度预浸料区段162,重新定向且放置在传送带418上,并且随后经由压实台粘合到由背衬层126背衬的第二连续长度的单向预浸料130,并且得到0/-45度背衬预浸料458,其中,0度预浸料夹在背衬层126与-45度预浸料之间。图40示出了从第一连续长度的单向预浸料128切割+45度预浸料区段164,并且粘合到由背衬层126背衬的第二连续长度的单向预浸料130,并且得到0/+45度背衬预浸料460,其中,0度预浸料夹在背衬层126与+45度预浸料之间。
125.图41至图46表示其中步骤508包括使用粘合站420将第一预浸料区段156粘合至连续长度的预浸料背衬组件406的工序,该预浸料背衬组件包括由制造系统100先前制造的背衬交叉板层预浸料416(即,中间背衬交叉板层预浸料480)。第一预浸料区段156粘合到其上的背衬交叉板层预浸料416包括在背衬层126上的一系列第二预浸料区段158。对此,图41至图46表示将一系列第一预浸料区段156粘合到先前制造的背衬交叉板层预浸料416的一系列第二预浸料区段158以得到最终背衬交叉板层预浸料482的工序。在每个实例中,第一预浸料区段156的纤维角度不平行于第二预浸料区段158的纤维角度。
126.图41示出了从第一连续长度的单向预浸料128切割90度预浸料区段160,重新定向并粘合到由背衬层126背衬的一系列-45度预浸料162(即,中间背衬交叉板层预浸料480),并且得到-45/90度背衬预浸料462(即,最终背衬交叉板层预浸料482),其中,-45度预浸料夹在背衬层126和90度预浸料之间。图42示出了从第一连续长度的单向预浸料128切割-45度预浸料区段162,并且粘合到由背衬层126背衬的一系列90度预浸料区段160,并且得到90/-45度背衬预浸料464,其中,90度预浸料夹在背衬层126与-45度预浸料之间。图43示出了从第一连续长度的单向预浸料128切割-45度预浸料区段162,并且粘合到由背衬层126背衬的一系列+45度预浸料区段164,并且得到+45/-45度背衬预浸料466,其中,+45度预浸料夹在背衬层126与-45度预浸料之间。
127.图44示出了从第一连续长度的单向预浸料128切割+45度预浸料区段164,并且粘合到由背衬层126(即,中间背衬交叉板层预浸料480)背衬的一系列-45度预浸料区段162,并且得到-45/+45度背衬预浸料468(即,最终背衬交叉板层预浸料482),其中,-45度预浸料夹在背衬层126与+45度预浸料之间。图45示出了从第一连续长度的单向预浸料128切割+45度预浸料区段164,并且粘合到由背衬层126背衬的一系列90度预浸料区段160,并且得到90/+45度背衬预浸料470,其中,90度预浸料夹在背衬层126与+45度预浸料之间。图46示出了从第一连续长度的单向预浸料128切割90度预浸料区段160,并且粘合到由背衬层126背衬的连续长度的一系列+45度预浸料区段164,并且得到+45/90度背衬预浸料472,其中,+45度预浸料夹在背衬层126和90度预浸料之间。
128.图47至图49表示这样的工序:其中,在执行将第一预浸料区段156粘合到没有其他预浸料材料的连续长度的背衬材料404的步骤508之后,方法500还包括将第二连续长度的单向预浸料130供给到粘合站420,并且将第二连续长度的单向预浸料130粘合到连续长度的背衬材料404上的第一预浸料区段156(即,中间背衬交叉板层预浸料480)。将第二连续长度的单向预浸料130供给通过切割站230(无切割)且进入粘合站420中。制造图47至图49中
所示的定向组合要求切割机110与粘合机400对准,如图1至图3中所示。对此,第二连续长度的单向预浸料130通过切割机110的移动方向与传送带418的移动方向对准。
129.由图47至图49表示的工序需要在粘合机400上安装一卷背衬交叉板层预浸料,该背衬交叉板层预浸料包括在背衬层126上的第一预浸料区段156(即,中间背衬交叉板层预浸料480)。此外,该工序需要在切割机110上安装一卷第二连续长度的单向预浸料130,并且拉动第二连续长度的单向预浸料130通过切割机110,而不切割成预浸料区段150。相反,图47至图49的过程包括使用传送带418将第二连续长度的单向预浸料130供给到粘合站420的传送带418上,同时在传送带418上方拉动背衬层126上的连续长度的第一预浸料区段156。工序还包括将第二连续长度的单向预浸料130粘合到背衬层126上的连续长度的第一预浸料区段156,从而得到背衬层126上的两层预浸料区段150(即,最终背衬交叉板层预浸料482)。
130.图47示出了将第二连续长度的单向预浸料130(即,0度预浸料)粘合到连续长度的背衬交叉板层预浸料416,该背衬交叉板层预浸料包括由背衬层126背衬的一系列90度预浸料区段160,并且得到90/0度背衬预浸料474,其中,90度预浸料夹在背衬层126和0度预浸料之间。图48示出了将第二连续长度的单向预浸料130粘合到连续长度的背衬交叉板层预浸料416,该背衬交叉板层预浸料包括由背衬层126背衬的一系列-45度预浸料区段162,并且得到-45/0度背衬预浸料476,其中,-45度预浸料夹在背衬层126与0度预浸料之间。图49示出了将第二连续长度的单向预浸料130粘合到连续长度的背衬交叉板层预浸料416,该背衬交叉板层预浸料包括由背衬层126背衬的一系列+45度预浸料区段164,并且得到+45/0度背衬预浸料478,其中,+45度预浸料夹在背衬层126与0度预浸料之间。
131.此外,本公开包括根据下列条款的实例:
132.条款1.一种用于制造背衬交叉板层预浸料(416)的制造系统(100),包括:切割机(110),具有切割站(230),该切割站构造为将连续长度的单向预浸料(122)切割成预浸料区段(150),每个预浸料区段具有不平行于单向预浸料(122)的纵向方向的一对相对的区段切割边缘(152);粘合机(400),具有传送带(418)和粘合站(420);拾放系统(300),构造为从切割机(110)拾取预浸料区段(150),并且将预浸料区段(150)以首尾相连的关系放置在传送带(418)上,并且定向成使得区段切割边缘(152)大体上平行于传送带(418)的纵向方向;并且其中,传送带(418)构造成将预浸料区段(150)供给到粘合站(420),粘合站(420)构造成将预浸料区段(150)粘合到连续长度的背衬材料(404),从而将预浸料区段(150)从传送带(418)传递到背衬材料(404),并且得到连续长度的背衬交叉板层预浸料(416)。
133.条款2.根据条款1的制造系统(100),其中,切割机(110)包括:轧辊组件(200),具有相对于彼此定位以限定辊接合部(210)的相对的轧辊(206),该辊接合部构造成接收并夹持到单向预浸料(122)上,并且将单向预浸料(122)的纵向区段供给到切割站(230)中。
134.条款3.根据条款2的制造系统(100),其中,切割机(110)包括:背衬单向预浸料卡盘(116),构造成支撑背衬单向预浸料滚筒(114),该背衬单向预浸料滚筒包含支撑在背衬层(126)上的一卷连续长度的单向预浸料(122);以及背衬层收集卡盘(134),构造成支撑背衬层收集滚筒(132),该背衬层收集滚筒用于在背衬层(126)从单向预浸料(122)剥离时收集背衬层(126)。
135.条款4.根据条款3的制造系统(100),其中,切割机(110)包括:气动摆动器组件
(180),位于背衬单向预浸料滚筒(114)与轧辊组件(200)之间,并且气动摆动器组件构造成在轧辊组件(200)拉动单向预浸料(122)通过切割机(110)时在单向预浸料(122)上施加恒定的张力载荷。
136.条款5.根据条款3的制造系统(100),其中:背衬层收集滚筒(132)位于轧辊组件(200)的下游且在切割站(230)的上游,并且该背衬层收集滚筒构造成当单向预浸料(122)在进入切割站(230)之前离开所述轧辊组件(200)时从单向预浸料(122)剥离背衬层(126)。
137.条款6.根据条款1的制造系统(100),其中:切割站(230)构造为将连续长度的单向预浸料(122)切割成预浸料区段(150),每个预浸料区段均具有相对于单向预浸料(122)的纵向方向以+45度、-45度或90度中的一个定向的区段切割边缘(152)。
138.条款7.根据条款6的制造系统(100),其中,切割站(230)包括:切割组件(232),具有切割装置(236)和切割装置致动器(240),该切割装置致动器构造成使切割装置(236)在单向预浸料(122)的宽度上平移,以将单向预浸料(122)切割成预浸料区段(150);以及转台(242),构造成支撑切割组件(232),并且锁定切割装置(236)相对于单向预浸料(122)的纵向方向的定向。
139.条款8.根据条款1的制造系统(100),其中,切割站(230)包括:切割表面(250),具有构造为流体地联接到真空源的多个孔,以用于将单向预浸料(122)真空联接到切割表面(250),以防止切割期间的移动。
140.条款9.根据条款1的制造系统(100),其中,切割机(110)包括:区段拾取位置(286),在该区段拾取位置处每个预浸料区段(150)由拾放系统(300)拾取;以及区段输送系统(270),构造成将每个预浸料区段(150)从切割站(230)运输到区段拾取位置(286)。
141.条款10.根据条款9的制造系统(100),其中,区段输送系统(270)包括:区段夹持系统(272),包括构造成夹持在预浸料区段(150)的相对的区段侧边缘(154)上的一对预浸料夹具(274);一对线性导轨(278),分别支撑一对预浸料夹具(274);以及夹具运输器致动器(280),构造为沿着线性导轨(278)移动预浸料夹具(274),从而将每个预浸料区段(150)从切割站(230)运输到区段拾取位置(286)。
142.条款11.根据条款1的制造系统(100),其中:拾放系统(300)包括具有机械臂(304)的机器人装置(302),该机械臂构造为拾取在切割机(110)处的预浸料区段(150),并且将预浸料区段(150)放置在传送带(418)上。
143.条款12.根据条款11的制造系统(100),其中,机械臂(304)包括构造成用于真空联接至预浸料区段(150)的真空末端执行器(306),真空末端执行器(306)包括:真空充气室(308),具有多孔表面并且构造为流体地联接至真空源,真空充气室(308)分成两个或更多个真空区(310);并且其中,真空区(310)中的每个流体联接到真空源,并且真空区(310)可基于预浸料区段(150)的形状通过真空压力单独地启用。
144.条款13.根据条款1的制造系统(100),其中,传送带(418)是真空传送带,该真空传送带构造为流体地联接到真空源,以用于将预浸料区段(150)真空联接到真空传送带。
145.条款14.根据条款1的制造系统(100),其中,粘合站(420)包括:至少一个压实台(425),构造为以使得预浸料区段(150)粘合到背衬材料(404)的方式压实预浸料区段(150)以抵靠背衬材料(404)。
146.条款15.根据条款14的制造系统(100),其中,至少一个压实台(425)包括:初始压
实台(426),位于传送带(418)的下游端的上游,并且初始压实台具有初始压实辊(428),该初始压实辊构造成向背衬材料(404)施加初始压实压力以抵靠传送带(418)上的预浸料区段(150),由此使得预浸料区段(150)粘合到背衬材料(404),从而得到背衬交叉板层预浸料(416);以及二次压实台(430),位于传送带(418)的下游端的下游,并且二次压实台具有相对于彼此定位以限定辊接合部(210)的上压实辊(432)和下压实辊(434),该辊接合部构造成接收背衬交叉板层预浸料(416),并且施加二次压实压力:由此增加所述预浸料区段(150)与所述背衬材料(404)的粘合。
147.条款16.根据条款15的制造系统(100),其中:上压实辊(432)和下压实辊(434)中的至少一者以拉动背衬材料(404)通过粘合站(420)的方式被可旋转地驱动。
148.条款17.根据条款1的制造系统(100),其中,粘合机(400)包括:至少一个加热装置(440),构造为加热背衬材料(404)和/或预浸料区段(150),以促进预浸料区段(150)与背衬材料(404)的粘合。
149.条款18.根据条款17的制造系统(100),其中:加热装置(440)包括红外发射器。
150.条款19.根据条款1的制造系统(100),其中,粘合机(400)包括:背衬材料卡盘(410),构造为支撑背衬材料滚筒(408),该背衬材料滚筒支撑一卷背衬材料(404),以用于从背衬材料滚筒(408)解绕并且供给通过切割机(110);交叉板层材料收集卡盘(414),构造成支撑用于收集背衬交叉板层材料预浸料(416)的交叉板层材料收集滚筒(412);并且背衬材料卡盘(410)和交叉板层材料收集卡盘(414)各自具有卡盘伺服电机(118),以用于分别可旋转地驱动背衬材料卡盘(410)和交叉板层材料收集卡盘(414)。
151.条款20.根据条款19的制造系统(100),其中,粘合机(400)包括:至少一个张力测定仪(422),构造成测量以下位置中的至少一个的张力载荷:在从背衬材料滚筒(408)解绕之后并且在接触预浸料区段(150)之前背衬材料(404)中;在卷绕到交叉板层材料收集滚筒(412)上之前背衬交叉板层预浸料(416)中;其中,张力测定仪(422)构造成分别将张力测量结果传送到控制器(102);并且控制器(102)构造为控制背衬材料卡盘(410)和交叉板层材料收集卡盘(414)的相应的卡盘伺服电机(118),并且以分别将背衬材料(404)和背衬交叉板层预浸料(416)的张力载荷保持在预定载荷范围内的方式来调节背衬材料滚筒(408)和交叉板层材料收集滚筒(412)上的相应的扭矩载荷。
152.条款21.根据条款20的制造系统(100),其中,张力测定仪(422)包括:载荷传感器(424),具有构造成支承背衬材料(404)的柱形表面,并且基于由背衬材料(404)在载荷传感器(424)上赋予的侧向力来测量张力载荷。
153.条款22.根据条款1的制造系统(100),其中:切割机(110)构造为以使得单向预浸料(122)通过切割机(110)的移动方向与传送带(418)的移动方向对准的方式定位成与粘合机(400)对准。
154.条款23.一种制造背衬交叉板层预浸料(416)的方法,该方法包括:使用切割机(110)的切割站(230)将第一连续长度的单向预浸料(128)切割成第一预浸料区段(156),每个第一预浸料区段具有不平行于单向预浸料(128)的纵向方向的一对相对的区段切割边缘(152);使用拾放系统(300)从切割机(110)拾取第一预浸料区段(156),并且将第一预浸料区段(156)以首尾相连的关系放置在粘合机(400)的传送带(418)上,并且定向成使得区段切割边缘(152)大体上平行于传送带(418)的纵向方向;使用传送带(418)将第一预浸料区
段(156)供给到粘合机(400)的粘合站(420);以及使用粘合站(420)将第一预浸料区段(156)粘合到连续长度的背衬材料(404)。
155.条款24.根据条款23的方法,其中,将第一预浸料区段(156)粘合至背衬材料(404)包括:使用粘合站(420)将第一预浸料区段(156)粘合至没有预浸料材料的连续长度的背衬层(126)。
156.条款25.根据条款23的方法,其中,将第一预浸料区段(156)粘合至背衬材料(404)包括:使用粘合站(420)将第一预浸料区段(156)粘合至连续长度的预浸料背衬组件(406);并且其中,预浸料背衬组件(406)包括由背衬层(126)背衬的预浸料材料。
157.条款26.根据条款25的方法,其中,将第一预浸料区段(156)粘合至预浸料背衬组件(406)包括:使用粘合站(420)将第一预浸料区段(156)粘合至连续长度的背衬交叉板层预浸料(416);并且其中,背衬交叉板层预浸料(416)包括在背衬层(126)上的首尾相连的一系列第二预浸料区段(158)。
158.条款27.根据条款23的方法,其中,在将第一预浸料区段(156)粘合至连续长度的背衬材料(404)之后,该方法还包括:使用传送带(418)将第二连续长度的单向预浸料(130)供应至粘合站(420);以及使用粘合站(420)将第二连续长度的单向预浸料(130)粘合到在连续长度的背衬层(126)上的第一预浸料区段(156)。
159.条款28.根据条款27的方法,还包括:以使得单向预浸料(128)通过切割机(110)的移动方向与传送带(418)的移动方向对准的方式将切割机(110)定位在粘合机(400)的上游;将包括在连续长度的背衬层(126)上的第一预浸料区段(156)的一卷背衬交叉板层预浸料(416)安装在粘合机(400)上;将一卷第二连续长度的单向预浸料(130)安装在切割机(110)上;拉动第二连续长度的单向预浸料(130)通过切割机(110),而不将第二连续长度的单向预浸料(130)切割成预浸料区段(150);使用传送带(418)将第二连续长度的单向预浸料(130)供给到粘合站(420),同时在传送带(418)上拉动背衬层(126)上的连续长度的第一预浸料区段(156);以及使用粘合站(420)将第二连续长度的单向预浸料(130)粘合到背衬层(126)上的连续长度的第一预浸料区段(156),从而得到在背衬层(126)上的两层预浸料区段(150)。
160.条款29.根据条款23的方法,还包括:将单向预浸料(122)接收在轧辊组件(200)的相对的轧辊(206)之间的辊接合部(210)内;以及使用轧辊(206)将单向预浸料(122)的纵向区段供给到切割站(230)中。
161.条款30.根据条款29的方法,还包括:将单向预浸料(122)支撑在背衬单向预浸料滚筒(114)上,单向预浸料(122)由背衬层(126)背衬;将背衬层(126)与单向预浸料(122)分离,同时拉动单向预浸料(122)通过切割机(110);以及当单向预浸料(122)与背衬层(126)分离时,在背衬层收集滚筒(132)上收集背衬层(126)。
162.条款31.根据条款30的方法,还包括:当轧辊组件(200)将单向预浸料(122)供给到切割站(230)中时,经由位于背衬单向预浸料滚筒(114)与轧辊组件(200)之间的气动摆动器组件(180)在单向预浸料(122)上施加基本上恒定的张力载荷。
163.条款32.根据条款30的方法,其中,将背衬层(126)与单向预浸料(122)分离,以及当单向预浸料(122)与背衬层(126)分离时收集背衬层(126),分别包括:当单向预浸料(122)在进入切割站(230)之前离开轧辊组件(200)时将背衬层(126)与单向预浸料(122)分
离;以及在位于轧辊组件(200)的下游且在切割站(230)的上游的背衬层收集滚筒(132)上收集背衬层(126)。
164.条款33.根据条款23的方法,其中,切割单向预浸料(122)包括:经由切割站(230)将连续长度的单向预浸料(122)切割成预浸料区段(150),每个预浸料区段具有相对于单向预浸料(122)的纵向方向以+45度、-45度或90度中的一个定向的区段切割边缘(152)。
165.条款34.根据条款33的方法,其中,切割单向预浸料(122)包括:经由包括在切割站(230)内的转台(242)锁定切割装置(236)相对于单向预浸料(122)的纵向方向的定向;以及使切割装置(236)在单向预浸料(122)的宽度上并沿由转台(242)锁定的定向平移。
166.条款35.根据条款33的方法,其中,切割单向预浸料(122)包括:经由真空压力将单向预浸料(122)固定至具有流体地联接至真空源的多个孔的切割表面(250)。
167.条款36.根据条款33的方法,还包括:使用定位成与切割站(230)相邻的区段输送系统(270)将每个预浸料区段(150)从切割表面(250)运输至区段拾取位置(286),在该区段拾取位置中拾放系统(300)拾取预浸料区段(150)。
168.条款37.根据条款36的方法,其中,将每个预浸料区段(150)从切割表面(250)运输到区段拾取位置(286)包括:经由区段夹持系统(272)的一对预浸料夹具(274)夹持到预浸料区段(150)的相对的区段侧边缘(154)上;以及经由夹具运输器致动器(280)沿着一对线性导轨(278)移动预浸料夹具(274),从而将每个预浸料区段(150)从切割站(230)运输到区段拾取位置(286)。
169.条款38.根据条款23的方法,其中,从切割机(110)拾取第一预浸料区段(156)包括:使用机器人装置(302)的机械臂(304)拾取每个预浸料区段(150)。
170.条款39.根据条款38的方法,其中,使用机械臂(304)拾取每个预浸料区段(150)包括:使用真空充气室(308)将每个预浸料区段(150)真空联接至机械臂(304)。
171.条款40.根据条款39的方法,其中,将每个预浸料区段(150)真空联接到机械臂(304)包括:将真空压力施加到真空充气室(308)的一个或多个真空区(310)。
172.条款41.根据条款23的方法,其中,将第一预浸料区段(156)供给到粘合站(420)包括:将第一预浸料区段(156)真空联接到真空传送带。
173.条款42.根据条款23的方法,其中,将第一预浸料区段(156)供给至粘合站(420)包括:以恒定速度移动传送带(418);以及当将预浸料区段(150)放置在传送带(418)上时,使拾放系统(300)的速度与传送带(418)的速度匹配。
174.条款43.根据条款23的方法,其中,将第一预浸料区段(156)粘合至背衬材料(404)包括:使用至少一个压实台(425)压实背衬材料(404)以抵靠预浸料区段(150),由此使得预浸料区段(150)粘合至背衬材料(404)。
175.条款44.根据条款43的方法,其中,压实背衬材料(404)以抵靠预浸料区段(150)包括:使用位于传送带(418)的下游端的上游的初始压实台(426)处的初始压实辊(428)对背衬材料(404)施加初始压实压力以抵靠支撑在传送带(418)上的预浸料区段(150);以及使用位于传送带(418)的下游端的下游的二次压实台(430)处的上压实辊(432)和下压实辊(434)在背衬材料(404)和预浸料区段(150)上施加二次压实压力。
176.条款45.根据条款44的方法,还包括:可旋转地驱动上压实辊(432)和下压实辊(434)中的至少一者,以拉动背衬材料(404)通过粘合站(420)。
177.条款46.根据条款23的方法,还包括:使用至少一个加热装置(440)加热传送带(418)上的预浸料区段(150)和/或背衬材料(404),以促进预浸料区段(150)与背衬材料(404)的粘合。
178.条款47.根据条款46的方法,其中,加热背衬材料(404)包括:使用红外发射器加热背衬材料(404)。
179.条款48.根据条款23的方法,还包括:从背衬材料滚筒(408)解绕背衬材料(404);将背衬材料(404)供给到传送带(418)上方,以用于将第一预浸料区段(156)粘合到背衬材料(404),以得到背衬交叉板层预浸料(416);以及在交叉板层材料收集滚筒(412)上收集背衬交叉板层预浸料(416)。
180.条款49.根据条款48的方法,还包括:使用至少一个张力测定仪(422)测量以下位置中的至少一个的张力载荷:在从背衬材料滚筒(408)上解绕之后且在接触预浸料区段(150)之前背衬材料(404)中;在卷绕到交叉板层材料收集滚筒(412)上之前背衬交叉板层预浸料(416)中;将来自张力测定仪(422)的张力测量传送到控制器(102);以及使用控制器(102)以将背衬材料(404)和背衬交叉板层预浸料(416)各自的张力载荷保持在预定载荷范围内的方式来分别控制背衬材料滚筒(408)和交叉板层材料收集滚筒(412)上的扭矩载荷。
181.条款50.根据条款49的方法,其中,测量张力载荷包括:使用载荷传感器(424)测量张力载荷,该载荷传感器具有构造为支承背衬材料(404)的柱形表面。
182.条款51.一种制造背衬交叉板层预浸料(416)的方法,包括:使用切割机(110)将第一连续长度的单向预浸料(128)切割成第一预浸料区段(156),每个第一预浸料区段具有不平行于单向预浸料(128)的纵向方向的一对相对的区段切割边缘(152);使用拾放系统(300)从切割机(110)拾取第一预浸料区段(156),并且将第一预浸料区段(156)以首尾相连的关系放置在粘合机(400)的传送带(418)上,并且定向成使得区段切割边缘(152)大体上平行于传送带(418)的纵向方向;使用传送带(418)将第一预浸料区段(156)供给到粘合机(400)的粘合站(420);使用粘合站(420)将第一预浸料区段(156)粘合到连续长度的背衬层(126),由此形成连续长度的中间背衬交叉板层预浸料(416);以及使用粘合站(420)将第二连续长度的单向预浸料(130)或首尾相连的一系列第二预浸料区段(158)粘合到中间背衬交叉板层预浸料(416)的第一预浸料区段(156),从而得到最终背衬交叉板层预浸料(416)。
183.本公开的附加修改和改进对本领域普通技术人员可以是显而易见的。因此,在本文中描述和示出的零件的特定组合旨在仅表示本公开的某些实例,而并非旨在用作本公开的精神和范围内的替代实例或装置的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1