一种轿车子午线轮胎的接头分散方法与流程
1.本发明涉及轮胎接头分散的技术领域,更具体的说,它涉及一种轿车子午线轮胎的接头分散方法。
背景技术:
2.随着社会经济的发展,子午线轮胎在满足汽车基本安全性能的基础上,还需要不断满足人们对舒适性和操作性的需求。轮胎的动静平衡和均匀性是影响舒适性和操作性的重要因素,而在轮胎生产过程中,成型工序合理分布各个部件接头的位置是确保轮胎具有良好均匀性和动静平衡的重要步骤。
3.轮胎的接头主要分为材料接头和成型接头,材料接头是轮胎各个部件生产过程中的拼接接头,成型接头是成型工序中各个部件贴合成环形件产生的接头,轮胎的接头在生产过程中是无法避免的,所以理想中的均匀在轮胎制造过程中时不可能实现的,故只有通过各种途径,把这种不均匀性和动静不平衡性控制在尽可能小的范围内。
4.现有的研究中,大多都是在解决成型接头均匀分散的问题,并没有考虑材料接头的均匀分散,轮胎的各个半制品部件包括:胎面、带束层、冠带条、帘布层、内衬层、胎侧、胎圈、支撑胶等,其中大部分半制品部件没有材料接头或材料接头对轮胎性能影响较小,但帘布层材料接头对轮胎均匀性和平衡性影响较大,因此需要提供一种同时考虑材料接头和成型接头均匀分散的接头分散方法。
技术实现要素:
5.针对现有技术存在的不足,本发明的目的在于提供一种轿车子午线轮胎的接头分散方法,其通过帘布层的材料接头和成型接头的位置,确定后续半制品部件成型接头的位置,同时实现了材料接头的均匀分散和成型接头的均匀分散。
6.为实现上述目的,本发明提供了如下技术方案:一种轿车子午线轮胎的接头分散方法,包括以下步骤:s01、确定帘布层材料接头和成型接头位置;s02、确定成型接头位置:根据已确定的材料接头位置与成型接头位置换算出贴合为环状后相邻接头之间的角度,此处的相邻接头包括成型接头和材料接头,选出角度最大的两相邻接头,将两相邻接头的中间位置确定为下一个未安排位置的半制品部件成型接头的位置;s03、确定后续接头位置,重复步骤s02,直至所有半制品部件成型接头的位置确定;当帘布层为一层时,步骤s02与步骤s01之间还包括以下步骤:s011、确定帘布层有无材料接头,若有,则执行步骤s02,若无,则执行步骤s012;s012、确定帘布层贴合为环状后帘布成型接头正对的位置为下一个未安排位置的半制品部件成型接头的位置;
s013、随机选择两接头沿瞬时针方向或沿逆时针方向的中间位置为下一未安排位置的半制品部件的成型接头位置,之后执行步骤s02;当帘布层为两层时,步骤s02与步骤s01之间,执行确定两帘布层位置的步骤;确定两帘布层位置包括以下步骤:s011、分别确定两层帘布层贴合为环状后相邻两接头的角度;s012、模拟两层帘布层的环形贴合,模拟两帘布层的不同贴合状态,在每一个贴合状态中,记录其中一帘布层各个接头沿顺时针方向与相邻另一帘布层的接头之间的角度,记录其中的最小值;s013、比较记录的各最小值,确定其中最大的角度并且记录为k;s014、确定两帘布层的位置,选定k值对一个的帘布层的贴合状态,将其中一帘布层旋转(k+1)/2-1度,将此时两帘布层的位置确定为帘布层的贴合位置。
7.通过采用上述技术方案,通过帘布层的材料接头和成型接头的位置,确定后续半制品部件成型接头的位置,同时实现了材料接头的均匀分散和成型接头的均匀分散。由于帘布层可能只有成型接头而无材料接头,此处给出了在轮胎只有一层帘布层且无材料接头时应该如何进行成型接头的分散。
8.通过对两帘布层环形贴合方式的模拟,分散最为均匀的方式作为最终两帘布层的位置,使得最终材料接头和成型接头的分散更加均匀。
9.本发明进一步设置为:当帘布层为两层时,所述步骤s011中,将两帘布层分别记录为第一帘布层和第二帘布层,第一帘布层的接头数记录为m,成型接头命名为x1,按照顺时针方向将各材料接头分别命名为x2至xm,x1至xm与后一个接头的角度分别记为a1至am;第二帘布层的接头数记录为n,其中成型接头命名为y1,按照顺时针方向将各材料接头分别命名为y2至yn,y1至yn与后一个接头的角度分别记为b1至bn。
10.本发明进一步设置为:当帘布层为两层时,所述步骤s011中,帘布层处于展开状态时,总长度记录为l,任一接头与后一个接头的距离记录为l
x
,该接头与后一个接头在帘布层贴合为环状后的角度为(l
x
/l)*360
°
。
11.本发明进一步设置为:当帘布层为两层时,所述步骤s012包括以下步骤:s0121、y1相对于x1顺时针偏转1
°
后作为两帘布层的一模拟贴合状态,分别计算第二帘布层其余接头与第一帘布层中沿顺时针方向相邻接头之间的角度,记录其中的最小值为q
11min
;s0122、y1相对于x1逆时针偏转1
°
后作为两帘布层的一模拟贴合状态,分别计算第二帘布层其余接头与第一帘布层中沿顺时针方向相邻接头之间的角度,记录其中的最小值为p
11min
。
12.本发明进一步设置为:当帘布层为两层时,所述步骤s012还包括以下步骤:s0123、将步骤s0121和步骤s0122中的x1分别换为x2至xm,重复步骤s0121和步骤s0122,获得q
21min
至q
m1min
和p
21min
至p
m1min
;s0124、将步骤s0121、步骤s0122和步骤s0123中的y1分别换为y2至yn,重复重复步骤s0121和步骤s0122,获得q
22min
至q
mnmin
和p
22min
至p
mnmin
。
13.通过采用上述技术方案,通过采用上述模拟方式,能够合理且快速的确定两帘布层的位置。
14.本发明进一步设置为:所述步骤s01中,通过成型机检测装置获得帘布层材料接头的位置。
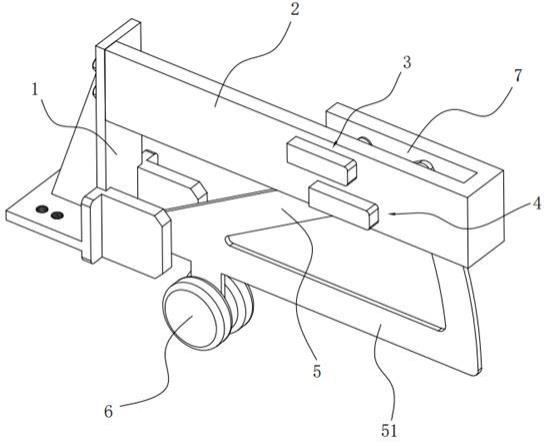
15.本发明进一步设置为:所述成型机检测装置包括第一传感器,其设置在传送带上方;第二传感器,其设置在传送带上方且高度低于第一传感器;遮挡板,其设置在传送带上方且围绕一轴线上下转动;以及滚轮,其设置在遮挡板下方;当滚轮直接与传送带接触时,遮挡板只遮挡住第二传感器,当滚轮压在帘布层上非接头位置时,遮挡板同时将第一传感器和第二传感器遮挡,当滚轮压在帘布层接头位置时,遮挡板只遮挡住第一传感器。
16.通过采用上述技术方案,通过滚轮压在不同位置时带动遮挡板对两传感器的不同遮挡效果以及传送带的传送速度能够计算出帘布层接头的位置。
17.综上所述,本发明相比于现有技术具有以下有益效果:1、本发明通过帘布层的材料接头和成型接头的位置,确定后续半制品部件成型接头的位置,同时实现了材料接头的均匀分散和成型接头的均匀分散;2、本发明中,由于帘布层可能只有成型接头而无材料接头,此处给出了在轮胎只有一层帘布层且无材料接头时应该如何进行成型接头的分散;3、本发明通过对两帘布层环形贴合方式的模拟,分散最为均匀的方式作为最终两帘布层的位置,使得最终材料接头和成型接头的分散更加均匀;4、本发明通过采用上述模拟方式,能够合理且快速的确定两帘布层的位置;5、本发明通过滚轮压在不同位置时带动遮挡板对两传感器的不同遮挡效果以及传送带的传送速度能够计算出帘布层接头的位置。
附图说明
18.图1为实施例的帘布层展开时的示意图;图2为实施例的帘布层贴合为环状后的示意图;图3为实施例的成型机检测装置的示意图;图4为实施例体现传感器具体组成的示意图。
19.图中:1、支撑架;2、第一固定板;21、连接板;3、第一传感器;4、第二传感器;5、遮挡板;51、支撑板;6、滚轮;7、第二固定板;8、信号发射端;9、信号接收端。
具体实施方式
20.为了使本领域的人员更好地理解本发明的技术方案,下面结合本发明的附图,对本发明的技术方案进行清楚、完整的描述,基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的其它类同实施例,都应当属于本技术保护的范围。此外,以下实施例中提到的方向用词,例如“上”“下”“左”“右”等仅是参考附图的方向,因此,使用的方向用词是用来说明而非限制本发明创造。
21.下面结合附图和较佳的实施例对本发明作进一步说明。
22.实施例:一种轿车子午线轮胎的接头分散方法,包括以下步骤:
s01、确定帘布层材料接头和成型接头位置;s02、确定成型接头位置:根据已确定的材料接头位置与成型接头位置换算出贴合为环状后相邻接头之间的角度,此处的相邻接头包括成型接头和材料接头,选出角度最大的两相邻接头,将两相邻接头的中间位置确定为下一个未安排位置的半制品部件成型接头的位置;s03、确定后续接头位置,重复步骤s02,直至所有半制品部件成型接头的位置确定。
23.首先确定帘布层的材料接头和成型接头位置,然后进行后续未安排位置的半制品部件成型接头的位置的确定,每个未安排位置的半制品部件成型接头确定的位置都是已确定位置的相邻接头中,相邻接头之间角度最大的两接头的中间位置;依次完成所有未安排位置的半制品部件成型接头的位置确定后,材料接头和成型接头分布均匀,提高了轮胎的动静平衡和均匀性。
24.具体的,当帘布层为一层时,步骤s02与步骤s01之间还包括以下步骤:s011、确定帘布层有无材料接头,若有,则执行步骤s02,若无,则执行步骤s012;s012、确定帘布层贴合为环状后帘布成型接头正对的位置为下一个未安排位置的半制品部件成型接头的位置;s013、随机选择两接头沿瞬时针方向或沿逆时针方向的中间位置为下一未安排位置的半制品部件的成型接头位置,之后执行步骤s02。
25.由于帘布层可能不存在材料接头,在不存在材料接头的时候,无法直接进行步骤s02,所以在步骤s02之前执行步骤s011、s012和s013,在确定好三个接头位置之后,再进行步骤s02。
26.具体的,当帘布层为两层时,步骤s02与步骤s01之间,执行确定两帘布层位置的步骤;在帘布层为两层的时候,首先需要对两帘布层的位置进行确定,之后再进行步骤s02,确定其余半制品部件的成型接头的位置;此处两帘布层的位置是指两帘布层贴合成为内外两环状之后两帘布层之间的相对位置,可以理解为两帘布层的接头之间的位置关系。
27.确定两帘布层位置包括以下步骤:s011、分别确定两层帘布层贴合为环状后相邻两接头的角度;s012、模拟两层帘布层的环形贴合,模拟两帘布层的不同贴合状态,在每一个贴合状态中,记录其中一帘布层各个接头沿顺时针方向与相邻另一帘布层的接头之间的角度,记录其中的最小值;s013、比较记录的各最小值,确定其中最大的角度并且记录为k;s014、确定两帘布层的位置,选定k值对一个的帘布层的贴合状态,将其中一帘布层旋转(k+1)/2-1度,将此时两帘布层的位置确定为帘布层的贴合位置。
28.通过模拟两层帘布层的环形贴合状态,之后通过比较能够确定材料接头和成型接头分布最均匀的贴合方式,从而确定两层帘布层的贴合位置。
29.具体的,步骤s011中,将两帘布层分别记录为第一帘布层和第二帘布层,第一帘布层的接头数记录为m,成型接头命名为x1,按照顺时针方向将各材料接头分别命名为x2至xm,x1至xm与后一个接头的角度分别记为a1至am;附图1和附图2中对第一帘布层接头命名和角度标记的示例展示,第二帘布层的接头数记录为n,其中成型接头命名为y1,按照顺时针方
向将各材料接头分别命名为y2至yn,y1至yn与后一个接头的角度分别记为b1至bn。
30.步骤s011中,帘布层处于展开状态时,总长度记录为l,任一接头与后一个接头的距离记录为l
x
,该接头与后一个接头在帘布层贴合为环状后的角度为(l
x
/l)*360
°
。
31.具体的,步骤s012包括以下步骤:s0121、y1相对于x1顺时针偏转1
°
后作为两帘布层的一模拟贴合状态,分别计算第二帘布层其余接头与第一帘布层中沿顺时针方向相邻接头之间的角度,记录其中的最小值为q
11min
;s0122、y1相对于x1逆时针偏转1
°
后作为两帘布层的一模拟贴合状态,分别计算第二帘布层其余接头与第一帘布层中沿顺时针方向相邻接头之间的角度,记录其中的最小值为p
11min
。
32.s0123、将步骤s0121和步骤s0122中的x1分别换为x2至xm,重复步骤s0121和步骤s0122,获得q
21min
至q
m1min
和p
21min
至p
m1min
;s0124、将步骤s0121、步骤s0122和步骤s0123中的y1分别换为y2至yn,重复重复步骤s0121和步骤s0122,获得q
22min
至q
mnmin
和p
22min
至p
mnmin
。
33.在步骤s013中,比较q
11min
至q
mnmin
和p
11min
至p
mnmin
,确定其中最大值为k。
34.具体的,步骤s01中,通过成型机检测装置获得帘布层材料接头的位置,具体的,参见附图3和附图4,成型机检测装置包括设置在传送带上方的第一传感器3、设置在传送带上方且高度低于第一传感器3的第二传感器4、设置在传送带上方且围绕一轴线上下转动的遮挡板5以及设置在遮挡板5下方的滚轮6;当滚轮6直接与传送带接触时,遮挡板5只遮挡住第二传感器4,当滚轮6压在帘布层上非接头位置时,遮挡板5同时将第一传感器3和第二传感器4遮挡,当滚轮6压在帘布层接头位置时,遮挡板5只遮挡住第一传感器3。
35.遮挡板5同时遮挡第一传感器3和第二传感器4时开始计时,直至遮挡板5遮挡住第一传感器3而未遮挡第二传感器4时计时结束,传送带的传送速度乘以时间能够得到帘布层的材料接头到帘布层传送前端的距离,也就是帘布层的材料接头与成型接头的距离;遮挡板5从只遮挡住第二传感器4转变为同时遮挡住第一传感器3和第二传感器4的时候,证明此时滚轮6压合在帘布的端部,而帘布的端部是帘布贴合呈环形时的成型接头位置;当遮挡板5从同时遮挡住第一传感器3和第二传感器4转变为只遮挡住第一传感器3的时候,证明此时滚轮6压合在材料接头处,所以通过传送带的传送速度乘以时间能够得到帘布层的材料接头与成型接头之间的距离。
36.具体的,成型机检测装置还包括支撑架1,支撑架1固定在传送带架体上;遮挡板5转动连接在支撑架1上,遮挡板5与支撑架1的转动轴线水平且与传送带的传送方向垂直;在遮挡板5与支撑架1转动连接一端固定连接有一支撑板51,滚轮6转动连接在支撑板51底部;通过滚轮6底部接触物体的厚度不同时,其能够通过支撑板51来带动遮挡板5进行转动。
37.成型机检测装置还包括第一固定板2和第二固定板7,第一固定板2固定连接在支撑架1上,第一固定板2和第二固定板7之间通过连接板21固定连接在一起;遮挡板5远离支撑架1的一端为自由端,自由端插入到第一固定板2和第二固定板7之间;第一传感器3和第二传感器4都设置有两部分,一部分为信号发射端8,一部分信号接收端9,信号发射端8和信号接收端9分别固定在第一固定板2和第二固定板7上,当遮挡板5的自由端位于信号发射端8和信号接收端9之间时,信号发射端8发射的信号无法被信号接收端9接收。
38.具体的,第一传感器3和第二传感器4都设置为红外线传感器,信号发射端8为红外线发射器,信号接收端9为红外线接收器。
39.当滚轮6支撑在传送带上时,遮挡板5的自由端只能够将第二传感器4遮挡,随着帘布层的传送而使得滚轮6支撑在帘布层上非材料接头位置时,滚轮6的高度提高,从而带动遮挡板5自由端的位置提高,使得第一传感器3和第二传感器4被同时遮挡;帘布继续传送,滚轮6支撑在材料接头位置时,遮挡板5的位置再次提高,使得遮挡板5的自由端高度高于第二传感器4高度,遮挡板5仅遮挡住第一传感器3。
40.以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1