全自动球类热熔焊接成型机的制作方法
1.本发明涉及匹克球制作设备领域,具体为全自动球类热熔焊接成型机。
背景技术:
2.热熔焊接成型机通过安装在其上焊件把超声能量传送到焊区,由于焊区即两个焊接的交界面处声阻大,因此会产生局部高温,又由于塑料导热性差,一时还不能及时散发,聚集在焊区,致使两个塑料的接触面迅速熔,热熔焊接成型机属于非标定制设备,可以根据产品的不同来定制相应的治具,例如:26孔皮匹克球,40孔匹克球等等。
3.但是,传统的热熔焊接成型机存在以下缺点:
4.(1)目前的匹克球一般采用超声波技术焊接,不能实现全自动化生产,人工单个放入匹克球,单个取出匹克球,需要大量人工,员工的工作强度大,制作成本较高;
5.(2)传统的热熔焊接成型机制备匹克球的时间过长,容易生产出不良匹克球,增加匹克球的制备成本。
技术实现要素:
6.本发明的目的在于提供全自动球类热熔焊接成型机,以解决上述背景技术中提出的目前的匹克球一般采用超声波技术焊接,不能实现全自动化生产,人工单个放入匹克球,单个取出匹克球,需要大量人工,员工的工作强度大,制作成本较高;传统的热熔焊接成型机制备匹克球的时间过长,容易生产出不良匹克球,增加匹克球的制备成本的问题。
7.为实现上述目的,本发明提供如下技术方案:全自动球类热熔焊接成型机,包括成型机底座,所述成型机底座的顶端安装有成型机机壳,所述成型机机壳内壁的底端从左到右依次安装有定位折叠上料机械手机构、加热成型机构和下料取除封边机械手机构,所述成型机机壳上安装有位于下料取除封边机械手机构下方的输送机,所述下料取除封边机械手机构包括滑行台、滑行块、第一电机、滑行丝杆、高度架、升降气缸、第二电机、下料台、螺纹柱、两个机械爪和两个活动块,所述定位折叠上料机械手机构包括位移台、位移块、位移丝杆、折叠座、固定台、支撑板、定位盘、方向座、角度气缸、连接座、折叠气缸和伺服电机,定位折叠上料机械手机构通过定位盘将半成品送入加热成型机构内。
8.作为本发明的一种优选技术方案,所述位移台的顶端开设有位移槽,所述位移槽的内部转动连接有位移丝杆,所述位移丝杆的中部螺纹连接有与位移槽滑动连接的位移块,所述位移块顶端的一侧固定安装有折叠座,所述位移块顶端的另一侧转动连接有折叠气缸,所述折叠座的内部转动连接有固定台,所述折叠气缸的活动端与固定台相邻的一侧转动连接,所述固定台的顶端固定安装有支撑板,所述支撑板的顶端转动连接有方向座,所述方向座的顶端固定安装有定位盘,所述定位盘的表面开设有若干个定位槽,所述支撑板的一侧固定安装有连接座,所述连接座的内部转动连接有角度气缸,所述角度气缸的活动端与方向座相邻的一侧转动连接,所述位移台的一侧固定安装有伺服电机,所述伺服电机的输出端穿过位移台与位移丝杆相邻的一侧固定连接,伺服电机通电后启动,伺服电机带
动位移丝杆转动,位移丝杆表面的螺纹与位移块内壁的螺纹相互匹配,位移块受到与之形状大小相互匹配的位移槽限位,所以位移块沿着位移丝杆发生滑动,位移块滑动的过程中多定位盘的位置进行调节,折叠气缸上电磁阀打开,往折叠气缸内输入压缩空气,推动活塞在折叠气缸内做往复运动,折叠气缸进行伸缩运动,折叠气缸从一侧推动固定台,使得固定台沿着折叠座发生角度偏转,角度气缸上电磁阀打开,往角度气缸内输入压缩空气,推动活塞在角度气缸筒内做往复运动,角度气缸进行伸缩运动,角度气缸从一侧拉扯方向座,使得定位盘随着方向座沿着支撑板发生角度偏转。
9.作为本发明的一种优选技术方案,所述位移台的底端与成型机机壳固定连接,定位折叠上料机械手机构通过位移台安装在成型机机壳上。
10.作为本发明的一种优选技术方案,所述滑行台的顶端开设有滑行槽,所述滑行槽的内部转动连接有滑行丝杆,所述滑行丝杆的中部螺纹连接有与滑行槽滑动连接的滑行块,所述滑行块的顶端固定安装有高度架,所述高度架底端的一侧固定安装有升降气缸,所述升降气缸的活动端固定安装有下料台,所述下料台的底端开设有活动槽,所述活动槽的内部转动连接有螺纹柱,所述螺纹柱的表面螺纹连接有两个活动槽滑动连接的活动块,两个所述活动块的底端均固定安装有机械爪,所述滑行台的一侧固定安装有第一电机,所述第一电机的输出端穿过滑行台与滑行丝杆正对的一侧固定连接,所述下料台的一侧固定安装有第二电机,所述第二电机的输出端穿过下料台与螺纹柱相邻的一侧固定连接,第一电机通电后启动,第一电机带动滑行丝杆转动,滑行丝杆表面的螺纹与滑行块内壁的螺纹相互匹配,滑行块受到与之形状大小相互匹配的滑行槽限位,所以滑行块沿着滑行丝杆发生滑动,对下料台的位置进行调节,升降气缸上电磁阀打开,往升降气缸内输入压缩空气,推动活塞在升降气缸筒内做往复运动,升降气缸进行伸缩运动,升降气缸从顶部推动下料台,对下料台的高度进行调节,第二电机通电后启动,第二电机带动螺纹柱转动,螺纹柱以自身的中心线为分界线开设两个方向相反的螺纹,两个活动块内部的螺纹分别与螺纹柱上的螺纹相互匹配,活动块受到与之形状大小相互匹配的活动槽限位,所以两个活动块沿着螺纹柱发生相对滑动,活动块带动机械爪进行同步运动,机械爪从匹克球的两侧进行夹持,将热熔焊接产品取出。
11.作为本发明的一种优选技术方案,所述滑行台的底端与成型机机壳固定连接,下料取除封边机械手机构通过滑行台安装在成型机机壳上。
12.作为本发明的一种优选技术方案,所述加热成型机构包括多槽位加热成型底模、四个立杆、定位板、推动气缸、滑杆和多槽位加热成型顶模,所述多槽位加热成型底模两侧的两端均固定安装有立杆,四个所述立杆的顶端分别与定位板底端的四个边角固定连接,所述定位板顶端的中部固定安装有推动气缸,所述推动气缸的活动端穿过定位板固定安装有多槽位加热成型顶模,所述多槽位加热成型顶模顶端的四个边角均固定安装有贯穿定位板的滑杆,推动气缸上电磁阀打开,往推动气缸内输入压缩空气,推动活塞在推动气缸筒内做往复运动,推动气缸进行伸缩运动,推动气缸从多槽位加热成型顶模的顶部向下推动,使得多槽位加热成型顶模与匹克球顶部接触,多槽位加热成型底模与匹克球底部接触,二者相互配合对匹克球进行加热热熔焊接成型,多槽位加热成型顶模滑动的过程中带动滑杆沿着定位板发生滑动,增加多槽位加热成型顶模滑动的稳定性。
13.作为本发明的一种优选技术方案,所述多槽位加热成型底模的底端和四个立杆的
底端均与成型机机壳固定连接,加热成型机构通过多槽位加热成型底模和立杆安装在成型机机壳上。
14.作为本发明的一种优选技术方案,所述成型机底座的一侧固定安装有数控面板,所述成型机底座的另一侧开设有出料口,所述出料口的内部固定安装有导料板,加工成型匹克球沿着导料板滑入外接冲切刀模内去掉封边。
15.与现有技术相比,本发明的有益效果是:
16.1、通过设置定位折叠上料机械手机构、下料取除封边机械手机构和加热成型机构,匹克球半成品放置在定位盘的定位槽内,位移块沿着位移丝杆发生滑动,角度气缸从一侧推动角度座,对定位盘的角度进行调节将半成品送入加热成型机构,多槽位加热成型底模和多槽位加热成型顶模对匹克球进行加热热熔焊接成型,两个机械爪从匹克球的两侧进行夹紧固定,将热熔焊接产品取出后放入冲切刀模内去掉封边,成型机的生产效率大大提高,而且不需要人工,降低匹克球的制备成本;
17.2、整个成型机对匹克球加工一体化而成,缩短了匹克球的加工时间,提高生产出匹克球的良品率,降低匹克球的制备成本。
附图说明
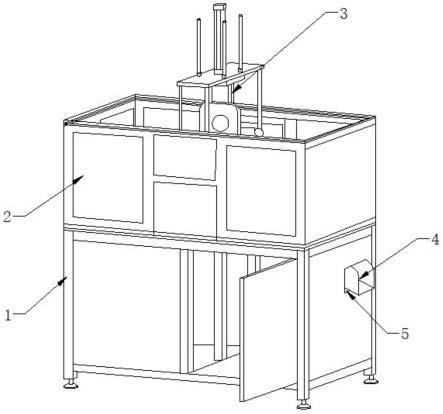
18.图1为本发明的立体图;
19.图2为本发明的侧视图;
20.图3为本发明的结构示意图;
21.图4为本发明定位折叠上料机械手机构的结构示意图;
22.图5为本发明下料取除封边机械手机构的结构示意图;
23.图6为本发明加热成型机构的侧视图。
24.图中:1、成型机底座;2、成型机机壳;3、加热成型机构;31、多槽位加热成型底模;32、立杆;33、定位板;34、推动气缸;35、滑杆;36、多槽位加热成型顶模;4、导料板;5、出料口;6、数控面板;7、定位折叠上料机械手机构;701、位移台;702、位移槽;703、位移块;704、位移丝杆;705、折叠座;706、固定台;707、支撑板;708、定位盘;709、方向座;710、定位槽;711、角度气缸;712、连接座;713、折叠气缸;714、伺服电机;8、下料取除封边机械手机构;801、滑行台;802、滑行块;803、滑行槽;804、第一电机;805、滑行丝杆;806、高度架;807、升降气缸;808、第二电机;809、下料台;810、螺纹柱;811、机械爪;812、活动块;813、活动槽;9、输送机。
具体实施方式
25.下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
26.请参阅图1-6,本发明提供了全自动球类热熔焊接成型机,包括成型机底座1,成型机底座1的顶端安装有成型机机壳2,成型机机壳2内壁的底端从左到右依次安装有定位折叠上料机械手机构7、加热成型机构3和下料取除封边机械手机构8,成型机机壳2上安装有
位于下料取除封边机械手机构8下方的输送机9,下料取除封边机械手机构8包括滑行台801、滑行块802、第一电机804、滑行丝杆805、高度架806、升降气缸807、第二电机808、下料台809、螺纹柱810、两个机械爪811和两个活动块812,定位折叠上料机械手机构7包括位移台701、位移块703、位移丝杆704、折叠座705、固定台706、支撑板707、定位盘708、方向座709、角度气缸711、连接座712、折叠气缸713和伺服电机714,定位折叠上料机械手机构7通过定位盘708将半成品送入加热成型机构3内。
27.位移台701的顶端开设有位移槽702,位移槽702的内部转动连接有位移丝杆704,位移丝杆704的中部螺纹连接有与位移槽702滑动连接的位移块703,位移块703顶端的一侧固定安装有折叠座705,位移块703顶端的另一侧转动连接有折叠气缸713,折叠座705的内部转动连接有固定台706,折叠气缸713的活动端与固定台706相邻的一侧转动连接,固定台706的顶端固定安装有支撑板707,支撑板707的顶端转动连接有方向座709,方向座709的顶端固定安装有定位盘708,定位盘708的表面开设有若干个定位槽710,支撑板707的一侧固定安装有连接座712,连接座712的内部转动连接有角度气缸711,角度气缸711的活动端与方向座709相邻的一侧转动连接,位移台701的一侧固定安装有伺服电机714,伺服电机714的输出端穿过位移台701与位移丝杆704相邻的一侧固定连接,伺服电机714通电后启动,伺服电机714带动位移丝杆704转动,位移丝杆704表面的螺纹与位移块703内壁的螺纹相互匹配,位移块703受到与之形状大小相互匹配的位移槽702限位,所以位移块703沿着位移丝杆704发生滑动,位移块703滑动的过程中多定位盘708的位置进行调节,折叠气缸713上电磁阀打开,往折叠气缸713内输入压缩空气,推动活塞在折叠气缸713内做往复运动,折叠气缸713进行伸缩运动,折叠气缸713从一侧推动固定台706,使得固定台706沿着折叠座705发生角度偏转,角度气缸711上电磁阀打开,往角度气缸711内输入压缩空气,推动活塞在角度气缸711筒内做往复运动,角度气缸711进行伸缩运动,角度气缸711从一侧拉扯方向座709,使得定位盘708随着方向座709沿着支撑板707发生角度偏转。
28.位移台701的底端与成型机机壳2固定连接,定位折叠上料机械手机构7通过位移台701安装在成型机机壳2上。
29.滑行台801的顶端开设有滑行槽803,滑行槽803的内部转动连接有滑行丝杆805,滑行丝杆805的中部螺纹连接有与滑行槽803滑动连接的滑行块802,滑行块802的顶端固定安装有高度架806,高度架806底端的一侧固定安装有升降气缸807,升降气缸807的活动端固定安装有下料台809,下料台809的底端开设有活动槽813,活动槽813的内部转动连接有螺纹柱810,螺纹柱810的表面螺纹连接有两个活动槽813滑动连接的活动块812,两个活动块812的底端均固定安装有机械爪811,滑行台801的一侧固定安装有第一电机804,第一电机804的输出端穿过滑行台801与滑行丝杆805正对的一侧固定连接,下料台809的一侧固定安装有第二电机808,第二电机808的输出端穿过下料台809与螺纹柱810相邻的一侧固定连接,第一电机804通电后启动,第一电机804带动滑行丝杆805转动,滑行丝杆805表面的螺纹与滑行块802内壁的螺纹相互匹配,滑行块802受到与之形状大小相互匹配的滑行槽803限位,所以滑行块802沿着滑行丝杆805发生滑动,对下料台809的位置进行调节,升降气缸807上电磁阀打开,往升降气缸807内输入压缩空气,推动活塞在升降气缸807筒内做往复运动,升降气缸807进行伸缩运动,升降气缸807从顶部推动下料台809,对下料台809的高度进行调节,第二电机808通电后启动,第二电机808带动螺纹柱810转动,螺纹柱810以自身的中心
线为分界线开设两个方向相反的螺纹,两个活动块812内部的螺纹分别与螺纹柱810上的螺纹相互匹配,活动块812受到与之形状大小相互匹配的活动槽813限位,所以两个活动块812沿着螺纹柱810发生相对滑动,活动块812带动机械爪811进行同步运动,机械爪811从匹克球的两侧进行夹持,将热熔焊接产品取出。
30.滑行台801的底端与成型机机壳2固定连接,下料取除封边机械手机构8通过滑行台801安装在成型机机壳2上。
31.加热成型机构3包括多槽位加热成型底模31、四个立杆32、定位板33、推动气缸34、滑杆35和多槽位加热成型顶模36,多槽位加热成型底模31两侧的两端均固定安装有立杆32,四个立杆32的顶端分别与定位板33底端的四个边角固定连接,定位板33顶端的中部固定安装有推动气缸34,推动气缸34的活动端穿过定位板33固定安装有多槽位加热成型顶模36,多槽位加热成型顶模36顶端的四个边角均固定安装有贯穿定位板33的滑杆35,推动气缸34上电磁阀打开,往推动气缸34内输入压缩空气,推动活塞在推动气缸34筒内做往复运动,推动气缸34进行伸缩运动,推动气缸34从多槽位加热成型顶模36的顶部向下推动,使得多槽位加热成型顶模36与匹克球顶部接触,多槽位加热成型底模31与匹克球底部接触,二者相互配合对匹克球进行加热热熔焊接成型,多槽位加热成型顶模36滑动的过程中带动滑杆35沿着定位板33发生滑动,增加多槽位加热成型顶模36滑动的稳定性。
32.多槽位加热成型底模31的底端和四个立杆32的底端均与成型机机壳2固定连接,加热成型机构3通过多槽位加热成型底模31和立杆32安装在成型机机壳2上。
33.成型机底座1的一侧固定安装有数控面板6,成型机底座1的另一侧开设有出料口5,出料口5的内部固定安装有导料板4,加工成型匹克球沿着导料板4滑入外接冲切刀模内去掉封边。
34.本发明在使用时:匹克球制备人员将匹克球半成品放置在定位盘708的定位槽710内,伺服电机714通电后启动,伺服电机714带动位移丝杆704转动,位移丝杆704表面的螺纹与位移块703内壁的螺纹相互匹配,位移块703受到与之形状大小相互匹配的位移槽702限位,所以位移块703沿着位移丝杆704发生滑动,位移块703滑动的过程中多定位盘708的位置进行调节,折叠气缸713上电磁阀打开,往折叠气缸713内输入压缩空气,推动活塞在折叠气缸713内做往复运动,折叠气缸713进行伸缩运动,折叠气缸713从一侧推动固定台706,使得固定台706沿着折叠座705发生角度偏转,角度气缸711上电磁阀打开,往角度气缸711内输入压缩空气,推动活塞在角度气缸711筒内做往复运动,角度气缸711进行伸缩运动,角度气缸711从一侧拉扯方向座709,使得定位盘708随着方向座709沿着支撑板707发生角度偏转,定位折叠上料机械手机构7通过定位盘708将半成品送入加热成型机构3内,推动气缸34上电磁阀打开,往推动气缸34内输入压缩空气,推动活塞在推动气缸34筒内做往复运动,推动气缸34进行伸缩运动,推动气缸34从多槽位加热成型顶模36的顶部向下推动,使得多槽位加热成型顶模36与匹克球顶部接触,多槽位加热成型底模31与匹克球底部接触,二者相互配合对匹克球进行加热热熔焊接成型,多槽位加热成型顶模36滑动的过程中带动滑杆35沿着定位板33发生滑动,增加多槽位加热成型顶模36滑动的稳定性,第一电机804通电后启动,第一电机804带动滑行丝杆805转动,滑行丝杆805表面的螺纹与滑行块802内壁的螺纹相互匹配,滑行块802受到与之形状大小相互匹配的滑行槽803限位,所以滑行块802沿着滑行丝杆805发生滑动,对下料台809的位置进行调节,升降气缸807上电磁阀打开,往升降气
缸807内输入压缩空气,推动活塞在升降气缸807筒内做往复运动,升降气缸807进行伸缩运动,升降气缸807从顶部推动下料台809,对下料台809的高度进行调节,第二电机808通电后启动,第二电机808带动螺纹柱810转动,螺纹柱810以自身的中心线为分界线开设两个方向相反的螺纹,两个活动块812内部的螺纹分别与螺纹柱810上的螺纹相互匹配,活动块812受到与之形状大小相互匹配的活动槽813限位,所以两个活动块812沿着螺纹柱810发生相对滑动,活动块812带动机械爪811进行同步运动,机械爪811从匹克球的两侧进行夹持,将热熔焊接产品取出放置输送机9上,输送机9对匹克球进行传递,加工成型匹克球沿着导料板4滑入外接冲切刀模内去掉封边。
35.尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1