中空吹塑机用机械手的制作方法
1.本实用新型涉及工业机械手技术领域,特别涉及一种中空吹塑机用机械手。
背景技术:
2.现有中空吹塑机通常采用人工取出吹塑产品,但人工操作速度慢,影响生产效率,增加生产成本。
技术实现要素:
3.本实用新型旨在至少解决现有技术中存在的技术问题之一。为此,本实用新型提出一种中空吹塑机用机械手,包括龙门架、移动底板、水平臂、升降臂、抓取座,所述移动底板滑动装于所述龙门架顶部,所述移动底板在所述龙门架顶部左右移动;所述水平臂滑动装于所述移动底板顶部,所述水平臂滑动在所述移动底板顶部前后移动;所述升降臂升降装于所述水平臂的前端;所述抓取座与所述升降臂转动连接。
4.根据本实用新型的一些实施例,所述移动底板上固定有第一电机,所述第一电机上连接有第一同步带轮,所述移动底板上开有窗口,所述窗口位于所述第一同步带轮的下方,所述窗口下方转动装有两个张紧轮;所述第一同步带轮上装有第一同步带,所述第一同步带绕过两个所述第一张紧轮后,将所述第一同步带的两端固定于所述龙门架的两端顶面。
5.根据本实用新型的一些实施例,所述移动底板与所述龙门架间装有第一滑轨滑块组件。
6.根据本实用新型的一些实施例,所述移动底板上固定有第二电机,所述第二电机上连接有第二同步带轮,所述第二同步带轮的前方对称设置有两个所述第二张紧轮;所述第二同步带轮上装有第二同步带,所述第二同步带绕过两个所述第二张紧轮后,将所述第二同步带的两端固定于所述水平臂上。
7.根据本实用新型的一些实施例,所述水平臂与所述移动底板间装有第二滑轨滑块组件。
8.根据本实用新型的一些实施例,所述水平臂的顶部装有第三电机,所述第三电机上连接有第三同步带轮,所述水平臂的前端转动装有第三张紧轮,所述第三同步带轮上装有第三同步带,所述第三同步带绕过两个所述第三张紧轮后,将所述第三同步带的两端固定于所述升降臂上。
9.根据本实用新型的一些实施例,所述升降臂包括第一升降臂、第二升降臂,所述第一升降臂与所述水平臂的前端升降连接,所述第一升降臂上固定所述第三同步带的两端,所述第一升降臂的顶端;所述第二升降臂滑动装于所述第一升降臂的前侧,所述第一升降臂的顶端与底端均固定安装有升降滚轮,两个所述升降滚轮间绕装有升降皮带,所述升降皮带的一端与所述第二升降臂的上段连接,所述升降皮带的另一端与所述水平臂的前端连接。
10.根据本实用新型的一些实施例,所述第一升降臂与所述水平臂的前端间装有第三滑轨滑道组件,所述第一升降臂与所述第二升降臂间装有第四滑轨滑道组件。
11.根据本实用新型的一些实施例,所述抓取座与所述升降臂的底端间装有旋转气缸。
12.本实用新型至少具有如下有益效果:
13.在抓取产品时,将移动底板在龙门架上移动至中空吹塑机处,水平臂向前伸出,使升降臂位于取料位置上方,升降臂下降,抓取座上的抓取件抓取产品;升降臂、水平臂复位,移动底板在龙门架上移动至输送带上方,升降臂下降,抓取座上的抓取件将产品放置于输送带上,实现产品的自动抓取。
14.本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
附图说明
15.本实用新型的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
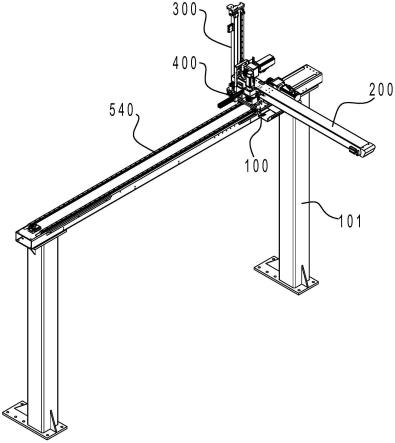
16.图1为本实用新型实施例的整体示意图;
17.图2为本实用新型实施例的移动底板、水平臂、升降臂、抓取座组合状态立体示意图图一;
18.图3为本实用新型实施例的移动底板、水平臂、升降臂、抓取座组合状态立体示意图图二;
19.图4为本实用新型实施例的本实用新型实施例的移动底板、水平臂、升降臂、抓取座组合状态侧视示意图。
具体实施方式
20.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本实用新型,而不能理解为对本实用新型的限制。
21.参照图1至3所示,一种中空吹塑机用机械手,包括龙门架101、移动底板100、水平臂200、升降臂300、抓取座400,移动底板100滑动装于龙门架101顶部,移动底板100在龙门架101顶部左右移动;水平臂200滑动装于移动底板100顶部,水平臂200滑动在移动底板100顶部前后移动;升降臂300升降装于水平臂200的前端;抓取座400与升降臂300转动连接;在抓取产品时,将移动底板100在龙门架101上移动至中空吹塑机处,水平臂200向前伸出,使升降臂300位于取料位置上方,升降臂300下降,抓取座400上的抓取件抓取产品;升降臂300、水平臂200复位,移动底板100在龙门架101上移动至输送带上方,升降臂300下降,抓取座400上的抓取件将产品放置于输送带上,实现产品的自动抓取。
22.参照图2、3所示,在移动底板100上固定有第一电机510,第一电机510上连接有第一同步带轮520,移动底板100上开有窗口110,窗口110位于第一同步带轮520的下方,窗口110下方转动装有两个张紧轮530;第一同步带轮520上装有第一同步带,使第一同步带轮
520沿第一同步带移动,第一同步带绕过两个第一张紧轮530后,将第一同步带的两端固定于龙门架101的两端顶面;
23.为使移动底板100移动的稳定,在移动底板100与龙门架101间装有第一滑轨滑块组件540。
24.移动底板100上固定有第二电机610,第二电机610上连接有第二同步带轮620,第二同步带轮620的前方对称设置有两个第二张紧轮630;第二同步带轮620上装有第二同步带,使第二同步带轮620沿第二同步带移动,第二同步带绕过两个第二张紧轮630后,将第二同步带的两端固定于水平臂200上。
25.为使水平臂200移动的稳定,水平臂200与移动底板100间装有第二滑轨滑块组件640。
26.参照图2至4所示,水平臂200的顶部装有第三电机710,第三电机710上连接有第三同步带轮720,水平臂200的前端转动装有第三张紧轮730,第三同步带轮720上装有第三同步带,第三同步带绕过两个第三张紧轮730后,将第三同步带的两端固定于升降臂300上。
27.升降臂300包括第一升降臂310、第二升降臂320,第一升降臂310与水平臂200的前端升降连接,第一升降臂310上固定第三同步带的两端,第一升降臂310的顶端;第二升降臂320滑动装于第一升降臂310的前侧,第一升降臂310的顶端与底端均固定安装有升降滚轮330,两个升降滚轮330间绕装有升降皮带340,升降皮带340的一端与第二升降臂320的上端连接,升降皮带340的另一端与水平臂200的前端连接,使第二升降臂320与第一升降臂310同步升降。
28.为保证升降过程中的稳定,在第一升降臂310与水平臂200的前端间装有第三滑轨滑道组件350,第一升降臂310与第二升降臂320间装有第四滑轨滑道组件360。
29.升降臂300中的第二升降臂320底端装有旋转气缸410,旋转气缸410与抓取座400连接,可根据产品的不同,在抓取座400上安装不同的抓取件。
30.上面结合附图对本实用新型实施例作了详细说明,但是本实用新型不限于上述实施例,在所属技术领域普通技术人员所具备的知识范围内,还可以在不脱离本实用新型宗旨的前提下做出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1