一种机械手取料装置的制作方法
1.本实用新型涉及眼镜加工设备技术领域,具体涉及一种机械手取料装置。
背景技术:
2.为了使眼镜腿在使用中具备更好的弯曲性能以及延伸其使用寿命,通常会在眼镜腿中置入一根长尾针。长尾针一端的头部为扁平形,成为扁位,扁位用于与眼镜铰接进行焊接,长尾针的另一端为尖端的锥型,用于插入到眼镜腿内。眼镜腿在制作过程中,需要将长尾针与眼镜腿送入到注塑机中进行注塑,形成最终包含有长尾针的眼镜腿产品,并且在注塑完成后的眼镜腿产品还要进行剪水口处理。传统的眼镜腿制作过程中,长尾针的取放以及注塑完成后的眼镜腿产品的剪水口操作都是通过独立的其它设备来完成的,使得整个长尾针设备结构繁杂,设备的外形尺寸占据空间大。
技术实现要素:
3.针对现有技术中存在的缺陷,本实用新型的目的在于提供一种机械手取料装置,旨在解决传统的长尾针设备上的用于取料的装置分散复杂而导致整体设备外形尺寸大的问题。
4.为实现上述目的,本实用新型采用的技术方案如下:
5.本技术提供了一种机械手取料装置,所述机械手取料装置包括机械手,所述机械手取料装置还包括治具夹板、一对尾针取料夹、分别用于驱动一对所述尾针取料夹动作的第一手指气缸、一对用于夹取镜腿的成品取料夹、分别用于驱动一对所述成品取料夹动作的第二手指气缸、水口夹以及用于驱动所述水口夹动作的第三手指气缸,一对所述第一手指气缸相平行固定安装在所述治具夹板一端上,一对所述尾针取料夹分别安装在一对所述第一手指气缸上,一对所述第二手指气缸相平行固定安装在所述治具夹板另一端的一侧上,一对所述成品取料夹分别安装在一对所述第二手指气缸上,所述第三手指气缸固定安装在所述治具夹板另一端的相对于所述第二手指气缸的另一侧上,所述水口夹安装在所述第三手指气缸上。
6.进一步的,每一所述尾针取料夹包括第一子尾针夹和第二子尾针夹,所述第一子尾针夹包括与尾针铰链位外侧面相匹配的第一凹槽以及设置在所述第一凹槽顶端水平向外延伸的挡块,所述第二子尾针夹包括与尾针铰链位外侧面相匹配的第二凹槽以及设置在所述第二凹槽顶端内凹的安装槽,其中当所述第一子尾针夹和第二子尾针夹靠拢闭合时,所述第一凹槽和第二凹槽配合形成用于夹持容纳尾针铰链的容纳槽,所述挡块伸入到所述安装槽内,位于所述容纳槽中的尾针铰链位顶端抵触在所述挡块的底端。
7.进一步的,所述水口夹的夹口处形成有与眼镜腿水口外形相匹配的夹持槽,所述夹持槽的槽面处形成有防滑花纹。
8.进一步的,所述机械手取料装置还包括滑轨、滑块、弹簧座、导轨板以及缓冲弹簧,所述第三手指气缸固定安装在所述导轨板上,所述滑轨固定安装在所述导轨板上,所述滑
块固定安装在所述治具夹板上,所述弹簧座固定安装在所述治具夹板上,所述导轨板的一端通过设置有的压簧与所述弹簧座相连,所述滑轨与所述滑块滑动相连。
9.本实用新型的有益效果为:本技术中的机械手取料装置其通过在同一治具夹板上安装有用于对长尾针进行夹取的一对尾针取料夹、用于对注塑完成的眼镜腿成品进行夹取的一对成品取料夹以及对水口进行夹取的水口夹,将尾针取料夹、成品取料夹以及水口夹集成安装在治具夹板上,通过机械手带动治具夹板的相应转动,使得对应的的取料夹移动至相应的工位完成夹取操作,相比传统的分散式布局结构,本技术中的机械手取料装置其布局更加合理,结构更加简单紧凑,整个设备的外形尺寸更小。
附图说明
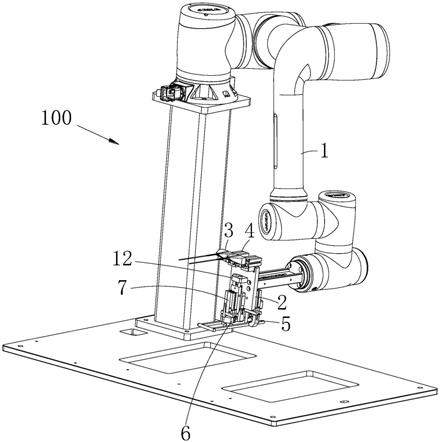
10.图1为本技术实施例中的机械手取料装置安装在长尾针插针机上的立体结构示意图。
11.图2为本技术实施例中的机械手取料装置安装在长尾针插针机上另一角度下的立体结构示意图。
12.图3为本技术实施例中的机械手取料装置立体结构示意图。
13.图4为本技术实施例中的机械手取料装置另一角度下的立体结构示意图。
14.图5为图4中的a处局部放大结构示意图。
15.图6为本技术实施例中的机械手取料装置又另一角度下的立体结构示意图。
16.图7为本技术实施例中的尾针立体结构示意图。
17.图8为本技术实施例中的尾针取料夹立体结构示意图。
18.图9为本技术实施例中的第一子尾针夹的立体结构示意图。
19.图10为本技术实施例中的第二子尾针夹的立体结构示意图。
20.图中:
21.100-机械手取料装置,200-长尾针插针机,300-尾针,301-铰链位,302-外侧面,1-机械手,2-治具夹板,3-尾针取料夹,31-第一子尾针夹,311-第一凹槽,312-挡块,32-第二子尾针夹,321-第二凹槽,322-安装槽,33-容纳槽,4-第一手指气缸,5-成品取料夹,6-水口夹,7-第三手指气缸,8-第二手指气缸,9-导轨板,10-滑轨,11-滑块,12-弹簧座。
具体实施方式
22.下面结合说明书附图与具体实施方式对本实用新型做进一步的详细说明。
23.参见附图1至2所示,本实施例提供一种机械手取料装置100,图1和图2为本实施例中的机械手取料装置100安装在长尾针插针机200上的结构示意图。
24.参照附图3至6,以及8至10所示,本实施例中的机械手取料装置100包括机械手1、治具夹板2、一对尾针取料夹3、分别用于驱动一对尾针取料夹3动作的第一手指气缸4、一对用于夹取镜腿的成品取料夹5、分别用于驱动一对成品取料夹5动作的第二手指气缸8、水口夹6以及用于驱动水口夹6动作的第三手指气缸7。
25.一对第一手指气缸4相平行固定安装在治具夹板2一端上,一对尾针取料夹3分别安装在一对第一手指气缸4上,一对第二手指气缸8相平行固定安装在治具夹板2另一端的一侧上,一对成品取料夹5分别安装在一对第二手指气缸8上,第三手指气缸7固定安装在治
具夹板2另一端的相对于第二手指气缸8的另一侧上,水口夹6安装在第三手指气缸7上。
26.参照附图4和5所示,通过将一对尾针取料夹3、一对成品取料夹5以及水口夹6集成安装在治具夹板2上,使用时通过机械手1带动治具夹板2移动至相应的工作区域后,转动治具夹板2使得对应的取料夹便于进行尾针300的夹取工作。相比传统的分散式布局结构,本技术中的机械手取料装置100其布局更加合理,结构更加简单紧凑,整个设备的外形尺寸更小。
27.结合参照附图7至10所示,在一些实施例中,尾针取料夹3包括第一子尾针夹31和第二子尾针夹32,第一子尾针夹31包括与尾针铰链位301的外侧面302相匹配的第一凹槽311以及设置在第一凹槽311顶端水平向外延伸的挡块312,第二子尾针夹32包括与尾针铰链位301的外侧面302相匹配的第二凹槽321以及设置在第二凹槽321顶端内凹的安装槽322,当第一子尾针夹31和第二子尾针夹32靠拢闭合时,第一凹槽311和第二凹槽321配合形成用于夹持容纳尾针铰链的容纳槽33,挡块312伸入到安装槽322内,位于容纳槽33中的尾针铰链位顶端抵触在挡块312的底端。
28.尾针取料夹3在对尾针进行夹取时,机械手1带动尾针取料夹3移动至尾针取料工位后,第一手指气缸4驱动第一子尾针夹31和第二子尾针夹32张开,机械手1带动尾针取料夹3下移,尾针上的铰链位插入到第一子尾针夹31和第二子尾针夹32之间形成的容纳槽33内,并使得尾针上的铰链位的顶端抵触到第一子尾针夹31上的挡块312底端后(此时由于尾针与挡块312之间的限制,导致机械手1无法继续下移),可以理解的是,挡块312的设置,可以保证尾针取料夹3对每次夹取的尾针处于同一位置,第一手指气缸4驱动第一子尾针夹31和第二子尾针夹32合拢,对夹取的尾针夹紧,夹紧到位后,机械手1带动治具夹板2移动,移动至后续的工位。
29.结合参照附图6所示,为了具备更好的抓紧力,在一些实施例中,水口夹6的夹口处形成有与眼镜腿水口外形相匹配的夹持槽,夹持槽的槽面处形成有防滑花纹。可以理解的是,夹持槽对眼镜腿成品进行夹取时,防滑花纹的设置可以防止眼镜腿成品轻易从夹持槽中掉落。
30.结合参照附图3至5所示,为了减轻成品取料夹5上的眼镜腿成品在伴随机械手1移动和翻转过程中对机械手1的冲击,在一些实施例中,机械手取料装置100还包括滑轨10、滑块11、弹簧座12、导轨板9以及缓冲弹簧,第三手指气缸7固定安装在导轨板9上,滑轨10固定安装在导轨板9上,滑块11固定安装在治具夹板2上,弹簧座12固定安装在治具夹板2上,导轨板9的一端通过设置有的压簧与弹簧座12相连,滑轨10与滑块11滑动相连。通过在弹簧座12和导轨板9之间设置有压簧,利用压簧的受压弹性变形的性能,可以减缓导轨板9向弹簧座12一侧移动时的移动速度,减轻撞击时的所产生的撞击力,进而避免整个机械手1晃动,提高产品的抓取可靠性。
31.显然,本领域的技术人员可以对本实用新型进行各种改动和变型而不脱离本实用新型的精神和范围。这样,倘若本实用新型的这些修改和变型属于本实用新型权利要求及其同等技术的范围之内,则本实用新型也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1