一种3D打印机成型平台模型多级顶出装置
一种3d打印机成型平台模型多级顶出装置
技术领域
1.本实用新型涉及3d打印技术领域,具体涉及一种3d打印机成型平台模型多级顶出装置。
背景技术:
2.3d打印技术又称增材制造技术,它是将数字三维模型通过软件分层并均匀切片成一组渐变的二维截面图形,利用激光、电子束、热熔喷嘴、光照等方式将热塑性材料、光敏固化型材料等特殊材料进行逐层堆积粘结,最终叠加成型的技术。而光固化3d打印技术,就是其中利用特殊光源照射光敏树脂或其混合材料,使液态材料固化堆积成型的一门技术。被广泛的应用于航空航天、医疗、铸造等领域。
3.对于lcd、dlp等面曝光成型打印机,在模型打印完成后需要对模型和成型平台进行分离,才能取下模型。因为用于光固化打印的浆料大都是粘性材料,对于贴底打印的成型模型,会紧紧黏附在成型平台上,很难取下,或者取下时会破环模型的完整性。并且多次打印后,残留的打印物料会黏附在成型平面上,使得平台过于光滑,打印时固化模型会脱落,导致打印失败。
4.为解决上述问题,目前常采用人工剥离的方法,如切割、用铲子铲等,这些方式极易损坏模型,破坏模型的完整性。而在多次打印后,为清除残留在成型面上的物料,使成型面保持一定粗糙度,也常用砂纸和锉刀对成型面进行人工打磨,这种方式效率较低,且存在一定安全隐患。
技术实现要素:
5.本实用新型的目的在于提供一种3d打印机成型平台模型多级顶出装置,用以解决现有面曝光3d打印机完成打印后产品分离或剥离不易的问题,本顶出装置在实现模型和成型平台分离前,可选择不同顶出行程来进行剥离,多级选择能实现更高效的剥离,保证了打印模型的完整性。
6.为解决上述技术问题,本实用新型公开了一种3d打印机成型平台模型多级顶出装置,包括顶出机构;所述顶出机构包括位于成型平台上方的固定平台和安装于固定平台上的竖直驱动机构,所述固定平台通过支撑柱与成型平台连接,在固定平台与成型平台之间设有顶针底板,所述成型平台上开设有若干通孔,所述顶针底板上设有若干一一对应通孔的顶针,所述竖直驱动机构与顶针底板连接、可驱动顶针底板上下运动以推动顶针从通孔顶出或收回,所述支撑柱外套有用于限制顶针底板行程的多级限位块,所述多级限位块为多级台阶结构、通过旋转不同台阶面至顶针底板下方实现顶针底板不同行程的选择。
7.上述方案还进一步包括打磨机构,所述打磨机构包括设置于成型平台一侧的打磨棒、以及设置于固定平台上的水平驱动组件,所述水平驱动组件与打磨棒连接可驱动打磨棒自转并且移动至成型平台的下表面并沿成型平台的下表面移动。
8.优选的,所述水平驱动组件为左右对称设置的2套,每套水平驱动组件均包括安装
于固定平台上、且相互平行的滑动导轨和齿条,电机通过安装座滑动装配于滑动导轨上,电机轴的内侧上安装有与齿条啮合的齿轮,电机轴的外侧上依次安装有大同步带轮a、大同步带轮b,所述打磨棒安装于连接板上、且横跨在2套水平驱动组件下方,连接板的两端均设有滑动杆,成型平台的两侧开设有滑槽,滑动杆与滑槽滑动装配,滑动杆上安装有小同步带轮a,小同步带轮a通过同步带与其上方对应的大同步带轮a连接实现打磨棒在成型平台的下表面移动,打磨棒两端上安装有小同步带轮b,小同步带轮b通过同步带与其上方对应的大同步带轮b连接实现打磨棒的自转。
9.优选的,所述顶出机构还包括光轴,光轴穿过顶针底板可对顶针底板滑动导向,光轴一端固定在固定平台底部,另一端抵住成型平台表面。所述光轴实现顶针底板沿光轴有约束的直线滑动。
10.优选的,所述垂直驱动机构为气缸,气缸主体与固定平台固定连接,气缸活塞与顶针底板固定连接。
11.优选的,所述固定平台的底部设有4个用于检测反馈顶针底板初始位置的销钉。
12.优选的,所述顶针均匀密布在顶针底板上。进一步优选的,所述顶针包括粗顶针和细顶针。
13.优选的,所述打磨棒的辊面上设有滚花。
14.与现有技术相比,本实用新型具有以下优点:
15.1.本实用新型设计一种专用的模型顶出装置,在实现模型和成形平台分离前,可选择不同顶出行程来进行模型剥离,在不损坏模型的前提下快速将模型与打印平台分离,且可以自动对成型平面进行打磨,不仅可以清除成型面残留物料,并且保证其具有一定粗糙度,保证打印成功率。
16.2.将顶针底板固定在气缸活塞一端,气缸推动顶针底板以及固定在底板上的顶针运动,结构简单可靠。
17.3.考虑到不同受力点形变不一,密布的大小不一的顶针将模型从打印平台顶出,可以更加高效的将打印模型剥离,并保证模型的高度完整性。
18.4.设置多级限位块,面对不同模型,可选择不同行程进行挤出,更加精准高效。
19.5.打磨棒上设有滚花,可均匀打磨,电机带动自动打磨成型平面,效率更高。
附图说明
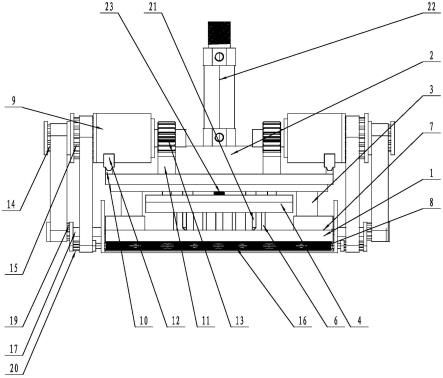
20.图1为本实用新型的第一视角结构示意图;
21.图2为本实用新型的第二视角结构示意图;
22.图3为本实用新型的第三视角结构示意图。
23.附图标记:1、成型平台,2、固定平台,3、支撑柱,4、顶针底板,5、通孔,6、顶针,7、多级限位块,8、打磨棒,9、电机,10、滑动导轨,11、齿条,12、安装座,13、齿轮,14、大同步带轮a,15、大同步带轮b,16、连接板,17、滑动杆,18、滑槽,19、小同步带轮a,20、小同步带轮b,21、光轴,22、气缸主体,23、气缸活塞。
具体实施方式
24.为了使本实用新型的目的和优点更清楚明了,下面结合附图和实施例对本实用新
型进行详细的描述。
25.本实用新型公开了一种3d打印机成型平台模型多级顶出装置,包括顶出机构和打磨机构。顶出机构可以针对于不同模型,可选择不同顶出行程来进行剥离,多级选择能实现更高效的剥离。打磨机构可以自动对成型平面进行打磨,保证其具有一定粗糙度。
26.所述顶出机构包括固定平台2和竖直驱动机构,所述固定平台2设置于成型平台1的上方,并与3d打印机主体连接。固定平台2的4个角分别通过4根支撑柱3与成型平台1固定连接,支撑柱3与成型平台1和固定平台2通过螺栓连接,螺栓型号为m6。
27.在固定平台2与成型平台1之间设有顶针底板4,在成型平台1上密布若干通孔5,所述顶针底板4分为上、下两层,下层底板上密布若干一一对应通孔5的顶针6。所述竖直驱动机构为气缸,气缸主体22与固定平台2固定连接,气缸活塞23与顶针底板4固定连接。气缸可驱动顶针底板4上下运动以推动顶针6从成型平台1的通孔5顶出或收回,实现顶针6顶出,将打印模型与成型平台1的分离。
28.所述支撑柱3外套设有可旋转的多级限位块7,多级限位块7用于限制顶针底板4行程,多级限位块7与顶针底板4的水平投影面部分重叠;多级限位块7为多级台阶结构、通过旋转不同台阶面至顶针底板4下方实现顶针底板4不同行程的选择。多级限位块7分有2层,每层台阶圆弧角为120度,多级限位块7通过销钉固定在成型平台1上,顶出模型前手动将多级限位平台旋转一定角度后,可实现2mm、5mm、10mm三个不同级别行程的顶出。如图1所示,顶针底板4位于初始位置时,顶针6伸入成型平台1,此时顶针6的下表面恰好与成型平台1的下表面重合,此时顶针底板4的下表面与成型平台1的上表面的距离等于活塞运动行程10mm。
29.所述顶出机构还包括光轴21,光轴21穿过顶针底板4的通孔5,可对顶针底板4滑动导向,光轴21的直径为8mm,光轴21一端固定在固定平台2底部,另一端抵住成型平台1上表面,实现顶针底板4沿光轴21有约束的直线滑动。
30.所述固定平台2的底部设有4个销钉,销钉的作用是用于检测反馈顶针底板4初始位置。
31.所述顶针6均匀密布在顶针底板4上,这样打印模型的各部位受力均匀,损伤可忽略不计。为了使打印模型可以更高效的脱离成型平台1,顶针6包括粗顶针和细顶针。
32.顶出机构的工作过程:当3d打印机正常进行打印时,顶针底板4位于初始位置,此时细顶针和粗顶针的下表面恰好与成型平台1的下表面重合,当打印完成需要挤出模型时,先转动多级限位块7选定合适的顶出行程级别,气缸开始工作,活塞推动顶针底板4及上面的细顶针和粗顶针运动,从成型平台1的下表面伸出,将模型从成型平台1上挤出,模型分离后,活塞反向运动,带动顶针底板4及上面的细顶针和粗顶针退回到初始位置。
33.采取本实用新型顶针6的顶出方案后,当需要分离模型时只需要下达顶出指令就可使顶针6穿过成型平台1,实现模型的快速可靠分离,密布的大小不一的顶针6可对模型不同受力部位进行稳定挤出,同时多级限位提供了不同行程的选择,实现了对面曝光3d打印机打印平台物料模型的多级的可靠顶出。
34.所述打磨机构包括打磨棒8和水平驱动组件,所述打磨棒8为长条圆棒结构,并且其辊面上设有滚花,以滚动打磨成型平台1的下表面(工作面),打磨棒8与成型平台1的长边同向设置,并安装于成型平台1的该侧。水平驱动组件则设置于固定平台2上,水平驱动组件
与打磨棒8连接可驱动打磨棒8自转,并将打磨棒8移动至成型平台1的下表面,且使打磨棒8沿成型平台1的下表面移动。
35.所述水平驱动组件为左右对称设置的2套,每套水平驱动组件包括相互平行的滑动导轨10和齿条11,滑动导轨10和齿条11与成型平台1的短边同向设置。水平驱动组件的电机9固定在安装座12上,安装座12则滑动装配于滑动导轨10上。电机轴的内侧上安装有与齿条11啮合的齿轮13,电机9工作时,齿轮13在齿条11上移动从而实现电机9的移动。电机轴的外侧上依次安装有大同步带轮a14、大同步带轮b15,所述打磨棒8安装于连接板16上,连接板16为u型结构,打磨棒8架设于连接板16上并穿过连接板16的两端,且横跨在2套水平驱动组件下方,连接板16的两端上都分别设有滑动杆17,成型平台1与连接板16垂直的两侧面开设有滑槽18,所述滑动杆17的内端与滑槽18滑动装配,滑动杆17可在滑槽18上滑动,滑动杆17的外端上安装有小同步带轮a19,小同步带轮a19通过同步带与其上方对应的大同步带轮a14连接,实现打磨棒8在成型平台1的下表面移动。打磨棒8两端上安装有小同步带轮b20,小同步带轮b20通过同步带与其上方对应的大同步带轮b15连接,实现打磨棒8的自转。
36.打磨机构的工作过程:当3d打印机打印完并顶出模型,顶针6回到成型平台1的下表面后,电机9转动带动齿轮13在齿条11上滚动,同时电机9也随安装座12在滑动导轨10上移动,内测的大同步带轮a14通过同步带带动打磨棒8自转,外侧的大同步带轮a14通过同步带带动滑动杆17在成型平台1侧面的滑槽18上移动,实现打磨棒8的往复移动。
37.采取本实用新型自动打磨方案后,当需要自动打磨成型平面时只需要下达打磨指令就可使打磨棒8在成型平面上滚动打磨,花纹均匀不会过度损坏成型平面,可实现可靠的余料清除和成型平台1的打磨。
38.本实用新型的工作原理:气缸未工作时,顶针底板4上层与固定平台2底部销钉接触,顶针下层底部与成型平台1成型面平齐,打印机可正常打印模型。当模型打印完毕,气缸开始工作,活塞推动顶针底板4沿光轴21往下运动,固定在顶针底板4上的密布的粗、细顶针向下运动将成型物料模型从成型平台1上挤出。通过手动拔出销钉并将多级限位块7旋转一定角度后,活塞运动到不同程时,顶针底板4下层与成型平台1顶部接触,顶针6将打印成型的物料完全挤出后,活塞带动顶针底板4和顶针6进行复位。
39.当顶出模型后,启动电机9,电机9一侧固定在齿轮13上,齿轮13在齿条11上滑动带动电机9在滑动导轨10上移动,则电机9另一侧固定的大同步带轮a14会带动内侧的同步带转动,实现打磨棒8的自转。同时外侧的大同步带轮b15会带动中间的滑动杆17沿着打印平台侧边上的滑槽18移动,实现打磨棒8的左右移动,电机9正转反转实现打磨棒机构的往复运动。
40.上述实施例,仅为对本实用新型的目的、技术方案和有益效果进一步详细说明的具体个例,本实用新型并非限定于此。凡在本实用新型的公开的范围之内所做的任何修改、等同替换、改进等,均包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1