一种硅胶注塑模具的制作方法
1.本实用新型涉及注塑模具技术领域,具体为一种硅胶注塑模具。
背景技术:
2.硅胶注塑模具广泛的应用于塑料产品的加工行业,是一种生产塑料制品的工具,也是赋予制品完整结构和精确尺寸的工具。具体的加工过程为:液体材料从浇口套流入到模具的型腔内,并利用加热装置进行加热,再固化成型,然后得到成品。
3.利用注塑模具加工完硅胶产品后,由于刚加工完成的硅胶产品比较柔软容易吸附在模具内,这样就不便于把硅胶取出,且强行取出容易导致硅胶的损坏。
技术实现要素:
4.本实用新型的目的在于针对上述的不足,提供一种硅胶注塑模具。
5.为了实现上述目的,本实用新型采用了如下技术方案:一种硅胶注塑模具,包括上模块和下模块,所述上模块的上端面开设有进料孔,所述上模块的下端面开设有模型槽,所述下模块的左端设置有动力机构,所述下模块的右端固定连接有充气机,所述充气机的输出端固定连接有进气管,所述下模块的上端固定连接有模型筒,所述模型筒的内部滑动连接有顶板,所述顶板的下端固定连接有连接杆,所述连接杆的下端固定连接有移动板,所述下模块的内部转动连接有转动杆,所述转动杆与移动板之间螺纹连接,所述转动杆与进气管之间转动连接。
6.进一步,所述下模块的上端固定连接有伸缩杆,所述伸缩杆与顶板之间固定连接,所述伸缩杆设置有三个,且均匀的分布在下模块的上端和模型筒的内部,工作时,在伸缩杆的作用下,使得顶板可以更加稳定的进行上下移动。
7.进一步,所述转动杆的圆周面固定连接有卡环,工作时,卡环起到限位的作用,使得移动板带动连接杆和顶板只能向上移动一定的距离。
8.进一步,所述转动杆为空心杆,工作时,这样充气机产生的风可以通过进气管进入转动杆的内部,最后由转动杆跑出。
9.进一步,所述动力机构包括电机、主动轮、从动轮、第二皮带和第一皮带,所述下模块的左端固定连接电机,所述电机的输出轴端固定连接主动轮,所述转动杆的圆周面固定连接从动轮,所述主动轮和从动轮之间通过第一皮带连接,所述从动轮设置多个,且均匀的分布在下模块的下端,多个所述从动轮两两之间通过第二皮带连接,工作时,开启电机带动主动轮转动,主动轮转动在第一皮带的作用下带动一个从动轮转动,一个从动轮转在第二皮带的作用下,使得各个从动轮同时转动。
10.进一步,所述下模块的下端固定连接有支撑腿,所述支撑腿设置有多个,且均匀的分布在下模块的下端,工作时,在支撑腿的作用下,使得下模块被支撑起一定的高度,这样便于在下模块的下端安装其他零件。
11.本实用新型的有益效果:
12.实际应用中,通过开启电机,使得顶板向上移动,由于硅胶具有一定的弹性,进而把硅胶顶端支撑起远离模型筒一定的距离,然后通过开启充气机,使得气体沿着转动杆向外跑出,随着气体的冲入,使得模型筒圆周面上的硅胶被逐渐吹动,逐渐的与模型筒松弛,不再紧密贴合,这时硅胶与模型筒之间的粘连性降低,这样就便于把加工完成的硅胶取下来,达到了便于取出硅胶的目的。
附图说明
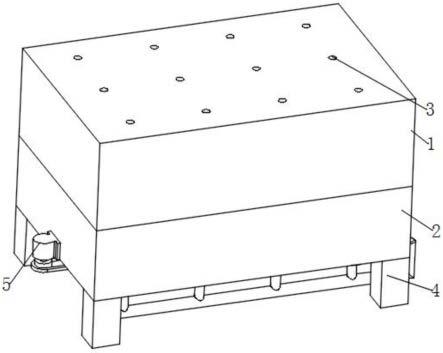
13.图1是本实用新型主视的整体结构示意图;
14.图2是本实用新型右视的整体结构示意图;
15.图3是本实用新型俯视拆分的结构示意图;
16.图4是本实用新型图3中a的放大结构示意图;
17.图5是本实用新型仰视的整体结构示意图;
18.图6是本实用新型主视剖面的结构示意图;
19.图7是本实用新型图6中b的放大结构示意图;
20.图8是本实用新型图6中c的放大结构示意图。
21.附图标记:上模块1;下模块2;进料孔3;支撑腿4;电机5;模型筒6;顶板7;主动轮8;第一皮带9;第二皮带10;进气管11;转动杆12;从动轮13;模型槽14;移动板15;伸缩杆16;连接杆17;卡环18;充气机19。
具体实施方式
22.如图1-图8所示,一种硅胶注塑模具,包括上模块1和下模块2,上模块1的上端面开设有进料孔3,上模块1的下端面开设有模型槽14,下模块2的左端设置有动力机构,下模块2的右端固定连接有充气机19,充气机19的输出端固定连接有进气管11,下模块2的上端固定连接有模型筒6,模型筒6的内部滑动连接有顶板7,顶板7的下端固定连接有连接杆17,连接杆17的下端固定连接有移动板15,下模块2的内部转动连接有转动杆12,转动杆12与移动板15之间螺纹连接,转动杆12与进气管11之间转动连接。
23.如图7所示,进一步的实施方案,下模块2的上端固定连接有伸缩杆16,伸缩杆16与顶板7之间固定连接,伸缩杆16设置有三个,且均匀的分布在下模块2的上端和模型筒6的内部,工作时,在伸缩杆16的作用下,使得顶板7可以更加稳定的进行上下移动。
24.如图7所示,进一步的实施方案,转动杆12的圆周面固定连接有卡环18,工作时,卡环18起到限位的作用,使得移动板15带动连接杆17和顶板7只能向上移动一定的距离。
25.如图7所示,进一步的实施方案,转动杆12为空心杆,工作时,这样充气机19产生的风可以通过进气管11进入转动杆12的内部,最后由转动杆12跑出。
26.如图1、图3和图5所示,进一步的实施方案,动力机构包括电机5、主动轮8、从动轮13、第二皮带10和第一皮带9,下模块2的左端固定连接电机5,电机5的输出轴端固定连接主动轮8,转动杆12的圆周面固定连接从动轮13,主动轮8和从动轮13之间通过第一皮带9连接,从动轮13设置多个,且均匀的分布在下模块2的下端,多个从动轮13两两之间通过第二皮带10连接,工作时,开启电机5带动主动轮8转动,主动轮8转动在第一皮带9的作用下带动一个从动轮13转动,一个从动轮13转在第二皮带10的作用下,使得各个从动轮13同时转动。
27.如图1、图2、图3和图5所示,进一步的实施方案,下模块2的下端固定连接有支撑腿4,支撑腿4设置有多个,且均匀的分布在下模块2的下端,工作时,在支撑腿4的作用下,使得下模块2被支撑起一定的高度,这样便于在下模块2的下端安装其他零件。
28.工作原理:
29.使用本实用新型时,当硅胶加工完成后,首先开启电机5带动主动轮8转动,主动轮8转动在第一皮带9的作用下带动一个从动轮13转动,一个从动轮13转在第二皮带10的作用下,使得各个从动轮13同时转动,从动轮13转动带动转动杆12转动,转动杆12转动使得移动板15带动着连接杆17和顶板7在伸缩杆16的作用下向上移动,由于硅胶具有一定的弹性,进而把硅胶顶端支撑起远离模型筒6一定的距离,然后通过开启充气机19,使得气体通过进气管11进入转动杆12内,再由转动杆12向外跑出进入模型筒6的内部,随着气体的冲入,使得模型筒6圆周面上的硅胶被逐渐吹动,逐渐的与模型筒6松弛,不再紧密贴合,这时硅胶与模型筒6之间的粘连性降低,这样就便于把加工完成的硅胶取下来。
30.本文中所描述的具体实施例仅仅是对本实用新型精神作举例说明。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本实用新型的精神所定义的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1