基于4D打印技术的耦合仿生内镜粘膜下剥离术的辅助牵引工具及其成型方法
本发明涉及本发明涉及4d打印,特别涉及一种基于4d打印技术的耦合仿生内镜粘膜下剥离术的辅助牵引工具及其成型方法。
背景技术:
1、临床上目前最常用的手术方式就是腹腔镜的esd胃癌根治术,这种手术创伤要比开腹手术创伤小很多,属于微创手术,且术后恢复比较快,但是手术费用要高昂,目前esd牵引方式主要分为以下三种:
2、(1)体位改变法(position change method):通过变换体位,使肿瘤位于高位,利用瘤体自身重力的作用,使esd变得更容易,其优点是无需外来辅助牵引,操作简单,缺点是麻醉状态变换体位较麻烦。
3、(2)带线钛夹法(clip-with-line method):通过一根固定在金属夹一侧臂的细线,在体外牵拉,使黏膜下层获得张力,从而暴露esd手术视野,其优点是操作方便,无需特殊器材,牵引效果好,减少了注射液的用量,节约了操作时间。缺点为带线钛夹法的牵引方向单一,需要退出内镜安装后再次进镜,操作相对复杂。
4、(3)内牵引法(internal traction method):包括铅垂牵引法、夹子联合弹簧牵引法、金属夹联合橡皮环或者尼龙绳牵引法等。优点是无需反复进镜及退镜,能够更好的暴露视野。缺点是控制较困难,剥离标本取出时容易损伤少量正常黏膜。
5、4d打印是指利用“可编程物质”和3d打印技术,制造出在预定的刺激下(如放入水中,或者加热、加压、通电、光照等)可自我变换物理属性(包括形态、密度、颜色、弹性、导电性、光学特性、电磁特性等)的三维物体。其中,“可编程物质”是指能够以编程方式改变外形、密度、导电性、颜色、光学特性、电磁特性等属性的物质。4d打印的第四维是指物体在制造出来以后,其形状或性能可以自我变换。
6、光敏树脂,俗称紫外线固化无影胶,或uv树脂(胶),主要由聚合物单体与预聚体组成,其中加有光(紫外光)引发剂,或称为光敏剂。在一定波长的紫外光照射下便会立刻引起聚合反应,完成固态化转换。光敏树脂指用于光固化快速成型的材料为液态光固化树脂,或称液态光敏树脂,主要由齐聚物、光引发剂、稀释剂组成。
7、仿生技术是人们从自然界中生物的特殊功能中研究出的特殊结构,模仿了生物一些优秀的功能,很多仿生产品也已用于生活中各种物品的结构上边,同时在医疗、军工等领域有着广泛的应用,其中蛙舌通过自身激励完成卷曲动作,有着高效的捕捉性能,并有效节省了所占用的空间;猫舌表面分布的倒刺能够有效地固定食物,有着很好的固定功能。
8、综上所述,现有的esd辅助牵引工具工作机制粗糙且体积较大,且没有定制功能。本发明根据以上问题采用了智能可靠、对人体温和、体积小且高度自定义的4d打印材料,耦合仿生蛙舌的卷曲特征与猫舌的倒刺结构,简化手术操作,提高手术成功率的同时降低了手术成本。
技术实现思路
1、为了克服体位改变法牵引麻醉状态变换体位较麻烦等不足;避免带线钛夹法牵引方向单一,操作相对复杂的缺陷;解决内牵引法控制较困难,剥离标本取出时容易损伤少量正常黏膜的问题,本发明提出了一种基于4d打印技术的耦合仿生内镜粘膜下剥离术(esd)的辅助牵引工具成型方法。很好的利用了4d打印技术和光敏树脂固化成型的方法,为解决内镜粘膜下剥离手术,减轻病患痛苦,提供了行之有效的方法。
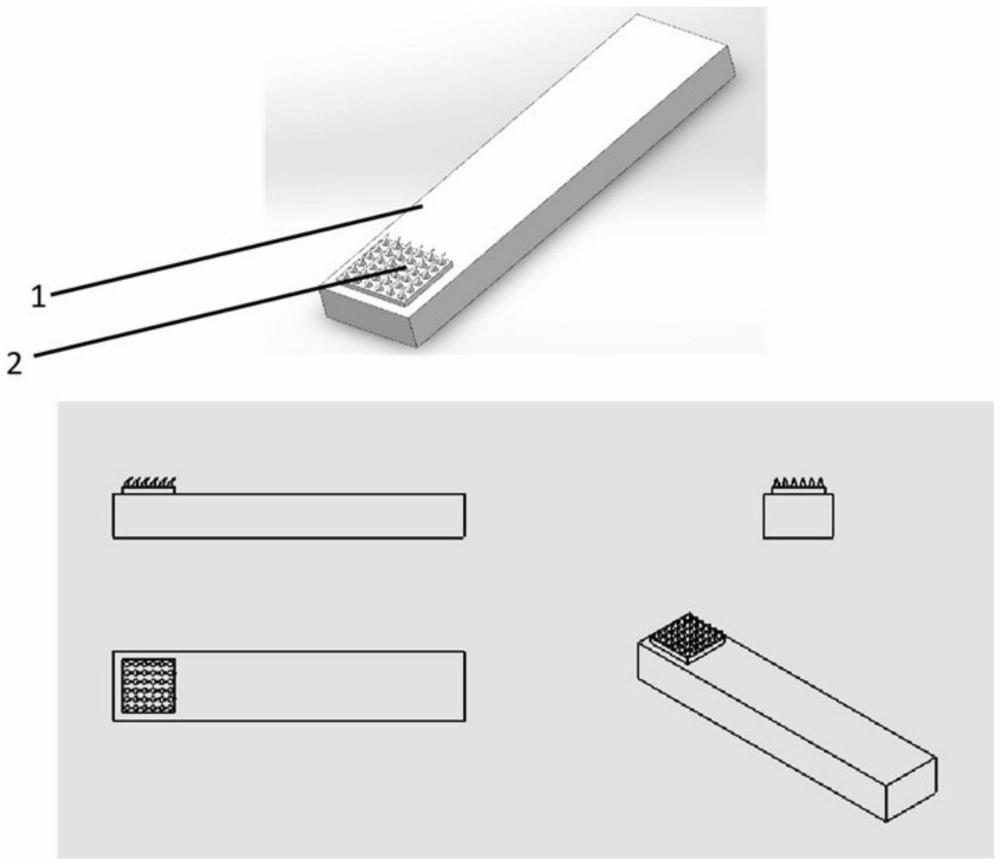
2、基于4d打印技术的耦合仿生内镜粘膜下剥离术的辅助牵引工具,包括蛙舌仿生钩爪,蛙舌仿生钩爪由钩爪头部1、前端倒刺2组成,所述钩爪头部1与前端倒刺2通过凹槽进行定位配合安装;
3、所述钩爪头部1包括钩爪承载体101和倒刺存储凹槽102,钩爪头部1中倒刺存储凹槽102与前端倒刺2进行配合定位,实现凹槽的装配,便于装载与卸载;
4、所述端倒刺2包括承载倒刺主体201和倒刺工作体202,承载倒刺主体201可存储入钩爪头部1中的倒刺存储凹槽102,实现配合定位;
5、基于4d打印技术的耦合仿生内镜粘膜下剥离术的辅助牵引工具,包括仿生猫舌倒刺结构,仿生猫舌倒刺结构由倒刺承载体3、倒刺工作体4组成;所述倒刺承载体3与倒刺工作体4通过凹槽进行定位配合安装;
6、所述倒刺承载体3包括承载体主体301和承载倒刺凹槽302,承载倒刺凹槽302组成可存放倒刺工作体4,承载体主体301可与胃镜进行直接配合;
7、所述倒刺工作体4包括倒刺支撑平板401和倒刺402,倒刺支撑平板401直接与倒刺承载体3接触,倒刺402在手术过程中起关键性作用;
8、基于4d打印技术的耦合仿生内镜粘膜下剥离术的辅助牵引工具的成型方法,具体成型步骤为:
9、步骤一、根据所确定的温度激励变形机制选取形状记忆聚氨酯材料(pu)
10、步骤二、制备4d打印材料,打印材料配比为,聚氨酯96~97份,硬脂酰氨1~2份以及聚乙酸蜡1~2份。先将以上材料颗粒按比例干燥,随后置入球磨机中进行混合,混合完成之后取出混合物,用双螺杆挤出机制备出4d打印材料丝材;
11、步骤三、根据患者胃部形状及病灶特征等条件,设计基于4d打印技术的内镜粘膜下剥离术(esd)的辅助牵引工具尺寸参数;
12、步骤四、在catia的机械制图-零件设计模块中建立蛙舌钩爪的三维主体模型;
13、步骤五、将所建模型切片并存为stl格式,输入熔丝沉积打印系统中,对所选取的形状记忆材料进行编程,采用熔丝沉积打印技术成型,打印过程中编程样件打印温度、打印速度、打印层厚的空间分布进行预设应力编程,使形状记忆材料pu能够对特定的温度激励作出反应;
14、步骤六、启动熔丝沉积打印系统,采用s2中4d打印材料为原材料,将丝状打印材料通过摩擦轮分别送入到打印机中,将打印机喷头加热至材料的熔融温度以上,使融化的材料通过打印头挤出,打印机喷头将材料分别按设定好的路线挤出。
15、步骤七、钩爪卷曲过程理想卷曲角度为δ,恢复所需时间为δt,则钩爪与患者胃内外表层接触δt后,钩爪卷曲变形的平均速率为v,则对应的形变为:
16、δ=vδt 1
17、步骤八、在完成一层之后打印机喷头向上移动一定的位移,进行下一层的打印,直至最终沉积形成实体模型,待打印好的实体冷却硬化后从平台上取下;
18、步骤九、根据手术部位确定倒刺的数量、排布与尺寸,并根据所确定的倒刺数量、排布与尺寸建立其模具的三维模型;
19、步骤十、所述的模具采用双光子聚合增材制造技术,增材制造成型;
20、步骤十一、将光敏树脂灌入到模具中,待其稳定后,将其与钩爪主体结构末端结合,采用用紫外线对其进行照射固化,使得倒刺层与勾爪主体相结合。
21、进一步的,所使用的形状记忆材料为聚氨酯材料(pu);
22、进一步的,激励温度参数范围为37℃-48℃。
23、进一步的,所使用的光敏树脂固化的成形方法,其中原材料为光敏树脂,固化光敏树脂采用波长范围为365-405nm的紫外光束,照射时长为10-50s,变形部位使用的激光功率为375w-395w,扫描速度为1300-1600mm/s,打印层厚为30um;非变形部位使用的激光功率为335w-365w,扫描速度为800-1000mm/s,打印层厚为60um;
24、进一步的,牵引工具模型为蛙舌仿生和仿生猫舌倒刺。
25、进一步的,可根据病灶情况,设置不同参数,实现快速个性化定制。
26、进一步的,所述辅助牵引工具主要采用4d打印与光敏树脂固化的方法成形,编程样件打印温度、打印速度、打印层厚在不同的部位不同。在辅助牵引工具变形部位,打印温度、打印速度比非变形部位大,打印层厚比非变形区小。
27、本发明的有益效果:
28、本发明由4d打印技术制成的蛙舌仿生钩爪和通过光敏树脂固化制成的仿生猫舌倒刺层固定连接组成,主要采用4d打印技术与光敏树脂固化的方法成形;平直的仿生蛙舌结构牵引工具在4d打印成型过程中埋入预设应力,并与仿生倒刺结构固定连接,手术过程中仿生钩爪由倒刺层刺入胃壁并与其固定连接,在体温激励下仿生蛙舌钩爪主体缓慢释放应力,卷曲并牵引病灶处的胃壁;实现了牵引角度灵活且牵引力可控,不容易损害粘膜组织,且工作机制简明可靠,工作系统简明独立,无需外界能量输入,有高度定制化的形状、尺寸、激励温度等参数,牵引工具体积小,便于放入体内与取出,方便手术操作;
29、本发明工作机制简明可靠,工作系统简明独立,无需外界能量输入,本发明可根据病人身体状况和病灶情况,定制牵引器具的形状和尺寸、激励温度等性能参数,工具体积小,便于放入体内与取出,方便手术操作,本发明通过4d打印技术得到仿生钩爪取代了传统esd牵引方式中的夹子,极大程度上降低了腹腔镜手术的难度,有效地提高了手术的容错率与成功率,基于4d打印技术的仿生钩爪能够在患者胃内部理化环境的激励下自主钩取胃壁组织,相比于传统esd牵引方式更能保护患者的胃部组织,基于4d打印的仿生钩爪相比传统esd中的机械胃镜夹更可靠,更智能,并且有着更低的成本,更加有利于腹腔镜手术的普及。
- 还没有人留言评论。精彩留言会获得点赞!