一种余热锅炉蒸汽压力和汽包水位协调控制方法与流程
1.本发明涉及联合循环机组技术领域,尤其涉及一种余热锅炉蒸汽压力和汽包水位协调控制方法。
背景技术:
2.现在燃气电厂几乎都采用燃气
‑
蒸汽联合循环发电方式,以追求高发电效率。余热锅炉回收燃气轮机的余热,产生高温高压蒸汽,冲转汽轮机带动汽轮发电机组做功。余热锅炉中选用国内成套三压再热自然循环汽包炉,因此汽包水位、蒸汽压力是余热锅炉重要的控制参数之一。
3.目前燃机余热锅炉中压汽包水位、中压蒸汽压力控制系统在启机、停机、低负荷、变负荷阶段一般以人工操作为主,由于中压汽包容积最小,在启停过程中中压蒸汽的压力波动对中压汽包虚假水位的影响最大,工况变化要求运行人员的操作往往在1分钟内迅速变化,否则就有汽包水位击穿的后果。
4.汽轮机投入中压蒸汽(ipcin)时,中压蒸汽还需要和冷再混合,在启停过程中投入中压蒸汽(ipcin)时,需要中压蒸汽压力调节阀、中压旁路压力调节阀和中压给水调节阀的协调控制,而原采用的控制技术大多基于三冲量控制、pid串级控制等,实际运行过程中,无法满足投入中压蒸汽(ipcin)时的协调控制能力。原中压蒸汽投入为:ipcin投入后,中旁压力调节阀快速关闭,随着中压蒸汽压力快速上升中压蒸汽调节阀自动开启,造成中压汽包虚假水位快速下降和快速上升,虚假水位波动速度最快达到了450mm/min。
技术实现要素:
5.为了解决上述问题,本发明提供了一种余热锅炉蒸汽压力和汽包水位协调控制方法,包括如下步骤:
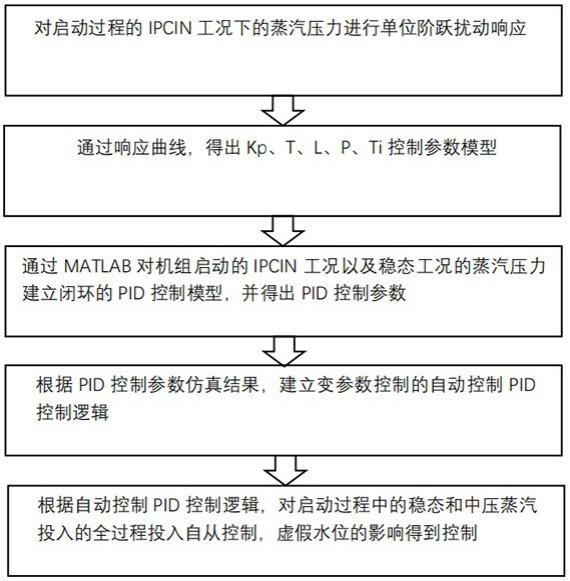
6.s1:对启动过程的ipcin工况下的蒸汽压力进行单位阶跃扰动响应;
7.s2:通过响应曲线,得出kp、t、l、p、ti控制参数模型;
8.s3:通过matlab根据单位阶跃进行建模;
9.s4:根据pid控制参数仿真结果,建立变参数控制的自动控制pid控制逻辑;
10.s5:根据自动控制pid控制逻辑,对启动过程中的稳态和中压蒸汽投入的全过程投入自从控制,虚假水位的影响得到控制。
11.优选的,所述s1还包括根据ziegler
‑
nichols法对不用工况下被控对象的参考模型,得出单位阶跃响应曲线。
12.优选的,所述s3包括通过matlab对机组启动的ipcin工况以及稳态工况的蒸汽压力建立闭环pid控制模型,并根据pid控制模型,得出pid控制参数。
13.优选的,所述pid控制模型为simulink模型。
14.优选的,所述s4还包括获取中旁调节阀的开环单位阶跃响应曲线。
15.本发明的有益效果在于:可在燃气机组启停投入中压蒸汽时,提高余热锅炉中压
蒸汽压力和中压汽包水位的适应性,防止控制对象在特殊工况下,如ipcin、ipcout、中旁跳出等导致中压汽包水位波动过大,影响机组的安全运行。
附图说明
16.图1为本发明流程图;
17.图2为原中压蒸汽投入结构示意图;
18.图3为本发明结构示意图;
19.图4为本发明simulink模型结构示意图;
20.图5为本发明中旁调节阀开环单位阶跃响应曲线图。
具体实施方式
21.参阅图1,本发明提供了一种余热锅炉蒸汽压力和汽包水位协调控制方法,包括如下步骤:
22.s1:对启动过程的ipcin工况下的蒸汽压力进行单位阶跃扰动响应,并根据ziegler
‑
nichols法对不用工况下被控对象的参考模型,得出单位阶跃响应曲线;
23.s2:通过响应曲线,得出kp、t、l、p、ti控制参数模型;
24.s3:通过matlab根据单位阶跃进行建模:通过matlab对机组启动的ipcin工况以及稳态工况的蒸汽压力建立闭环pid控制模型,并根据pid控制模型,得出pid控制参数;所述pid控制模型为simulink模型;
25.s4:根据pid控制参数仿真结果,建立变参数控制的自动控制pid控制逻辑,并获取中旁调节阀的开环单位阶跃响应曲线;
26.s5:根据自动控制pid控制逻辑,对启动过程中的稳态和中压蒸汽投入的全过程投入自从控制,虚假水位的影响得到控制。
27.参阅图2,原中压蒸汽投入为:ipcin投入后,中旁压力调节阀快速关闭,随着中压蒸汽压力快速上升中压蒸汽调节阀自动开启,造成中压汽包虚假水位快速下降和快速上升,虚假水位波动速度最快达到了450mm/min。
28.本发明目的是为了机组启停投入中压蒸汽(ipcin)时,提高余热锅炉中压蒸汽压力和中压汽包水位的适应性,防止控制对象在特殊工况下(如ipcin,ipcout,中旁跳出等)导致中压汽包水位波动过大,影响机组的安全运行,发明了一种基于自适应控制的余热锅炉蒸汽压力、汽包水位协调控制方法。
29.具体的,本发明以传统的三冲量汽包水位控制为主,包含控制参数自适应、前馈回路自适应和给水执行机构流量特性自适应。
30.参阅图3
‑
5,本发明提供了一种实施例:
31.第一部分控制参数整定,根据ziegler
‑
nichols法对不用工况下被控对象的参考模型,给出单位阶跃响应曲线,并根据工况变化的经验参数整定,给出kp,ti等控制参数,并经过反复测试,用matlab根据单位阶跃进行建模。
32.第二部分应用matlab给出pid参数的simulink模型。
33.第三部分协调控制以中旁压力作为自变量,获取中旁调节阀的开环单位阶跃响曲线。l=0.5,t=640
‑
170=560,kp=2,根据ziegler
‑
nichols法:
[0034][0035][0036]
其中:kp:响应曲线的放大系数;t:响应曲线的时间常数;l:响应曲线的延迟时间;p:比例系数或比例增益;ti:积分时间常数。
[0037]
第四部分中压蒸汽切换投入ipcin时的相应曲线,p=0,即在特殊工况时,闭锁中旁调节阀的比例作用。
[0038]
具体的,采用常用临界比例度法整定pid控制参数仅适用于已知对象传递函数的场合,在闭合的控制系统里,将调节器置于比例作用,从大到小逐渐改变调节器的比例度,得到等幅振荡的过渡过程,此时的比例度成为临界比例度δ
k
=30,相邻两个波峰间的时间间隔为临界振荡周期t
k
=8。
[0039]
具体的,协调控制设置为当中压蒸汽投入(ipcin)时中旁调节阀在原有设定值基础上增加0.14,由于中旁pid为正作用,将持续关闭执行机构。本例中将中旁调节阀的比例放大系数调整为kp=460,ki=kp*ti=76,作为稳态的pi控制参数。由于工况切换(ipcin、ipcout等)时无法得到稳态的传递函数,因此不适用常用的工程整定方法,大多依靠的是经验公式,即对工程整定的参数进行调整。为了避免投入中压蒸汽时压力波动过大造成虚假水位,设置投入ipcin时闭锁中压旁路的比例作用,即原pi控制作为纯i控制的方式。
[0040]
具体的,使用了新的协调控制后,中旁压力,中压蒸汽、中压给水可以全程投入自动作用,并在中压蒸汽投入过程中,对虚假水位的抑制在20mm/min波动范围内,相比使用前的450mm/min有了根本的改变。
[0041]
上述实施例中,描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本领域人员所进行的改动和变化不脱离本发明的精神和范围,则都应在本发明所附权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1