一种基于机器学习的环路热管太阳能液位模式识别方法
1.本发明属于太阳能领域,尤其涉及一种太阳能集热器系统。
背景技术:
2.随着现代社会经济的高速发展,人类对能源的需求量越来越大。然而煤、石油、天然气等传统能源储备量不断减少、日益紧缺,造成价格的不断上涨,同时常规化石燃料造成的环境污染问题也愈加严重,这些都大大限制着社会的发展和人类生活质量的提高。能源问题已经成为当代世界的最突出的问题之一。因而寻求新的能源,特别是无污染的清洁能源已成为现在人们研究的热点。
3.太阳能是一种取之不尽用之不竭的清洁能源,而且资源量巨大,地球表面每年收的太阳辐射能总量为1
×
10
18
kw
·
h,为世界年耗总能量的一万多倍。世界各国都已经把太阳能的利用作为新能源开发的重要一项。然而由于太阳辐射到达地球上的能量密度小(每平方米约一千瓦),而且又是不连续的,这给大规模的开发利用带来一定困难。因此,为了广泛利用太阳能,不仅要解决技术上的问题,而且在经济上必须能同常规能源相竞争。
4.针对集热器的结构,现有技术已经进行了很多的研发和改进,但是整体来说集热能力不足,而且还存在运行时间长容易结垢问题,影响集热效果。
5.无论哪种形式和结构的太阳能集热器,都要有一个用来吸收太阳辐射的吸收部件,集热器的结构对太阳能的吸收起到重要的作用。
6.针对上述问题,本发明在前面发明的基础上进行了改进,提供了一种新的环路热管太阳能集热系统,从而解决热管换热量低及其换热不均匀的问题。
7.在应用中发现,太阳能持续集热加热或者晚上不加热会导致内部流体形成稳定性,即流体不再流动或者流动性很少,或者流量稳定,导致集热管振动性能大大减弱,从而影响集热管的除垢以及加热的效率。因此需要对上述太阳能集热器进行改进。本技术人已经对此申请了相关的专利。
8.但是,在实践中发现,通过固定性周期性以及参数或者参数差变化来调整管束的振动,会出现滞后性以及周期会出现过长或者过短的情况。因此本发明对前面的申请进行了改进,对振动进行智能型控制,从而使得内部的流体能够实现的频繁性的振动,从而实现很好的除垢以及加热效果。
技术实现要素:
9.本发明针对现有技术中的不足,提供一种新式结构的集热装置。该集热装置能够基于机器学习与模式识别的理论方法,根据集热装置不同的运行工况,利用集热装置实时监控系统中数据,设计出相应的集热运行模式,用大量的数据训练深度卷积神经网络,从而进行集热装置除垢,提高热利用效果和除垢效果。
10.为实现上述目的,本发明采用如下技术方案:
11.一种基于机器学习的环路热管太阳能压力模式识别方法,所述集热装置包括反射
镜和集热管箱,所述集热装置包括除垢阶段,所述采取如下方式运行:在除垢阶段,采取如下方式运行:
12.所述压力感知元件与控制器进行数据连接,所述压力数据实时存储在数据库中,采用一维深度卷积神经网络提取数据特征,并进行模式识别,从而控制是否对集热管箱进行集热以进行除垢;
13.所述基于压力模式识别包括如下步骤:
14.1)数据准备:对数据库中的集热装置的压力数据进行重新审查和校验,对缺失数据、无效数据、不一致数据进行纠正,保证数据的正确性以及逻辑上的一致性;
15.2)生成数据集:将准备好的数据分成训练集/训练集标签、检测集/检测集标签;
16.3)网络训练:将训练集数据输入卷积神经网络,不断经过卷积、池化,得到特征向量,送入全连接网络。通过计算网络的输出与训练集标签,得到网络误差,利用误差反向传播算法,不断修正网络权值、偏置、卷积系数、池化系数,使误差满足设定的精度要求,网络训练完成;
17.4)网络检测:将检测集数据输入到已经训练好的网络中,输出检测结果;
18.5)集热器运行:根据检测结果控制是否对集热管箱进行集热以进行除垢。
19.作为优选,所述集热装置包括位于下部的集热管箱、左上管、右上管和放热管组,左上管、右上管位于集热管箱的上部,所述放热管组包括左放热管组和右放热管组,左放热管组与左上管和集热管箱相连通,右放热管组与右上管和集热管箱相连通,从而使得集热管箱、左上管、右上管和放热管组形成加热流体封闭循环,所述放热管组为一个或多个,每个放热管组包括圆弧形的多根放热管,相邻放热管的端部连通,使多根放热管形成串联结构,并且使得放热管的端部形成放热管自由端;集热管箱包括第一管口和第二管口,第一管口连接左放热管组的入口,第二管口连接右放热管组的入口,左放热管组的出口连接左上管,右放热管组的出口连接右上管。
20.本发明具有如下优点:
21.1、本发明能够基于机器学习与模式识别的理论方法,根据集热装置不同的运行工况,利用集热管箱实时监控系统中液位数据,设计出相应的集热运行模式,用大量的液位数据训练深度卷积神经网络,从而进行集热装置除垢,提高热利用效果和除垢效果。
22.2、本发明提出了新式结构的集热装置,该集热装置能够提高集热效果,提高集热管的放热能力,减小能量的耗费。
23.3、一种新式结构的集热装置,通过在有限的空间设置更多的放热管组,增加管束的振动范围,从而强化传热,增强除垢。
24.4、本发明通过流体流动方向上的放热管组管径以及间距分布的设置,可以进一步提高换热效率。
25.5、本发明通过大量的实验和数值模拟,优化了集热装置的参数的最佳关系,从而实现最优的加热效率。
附图说明:
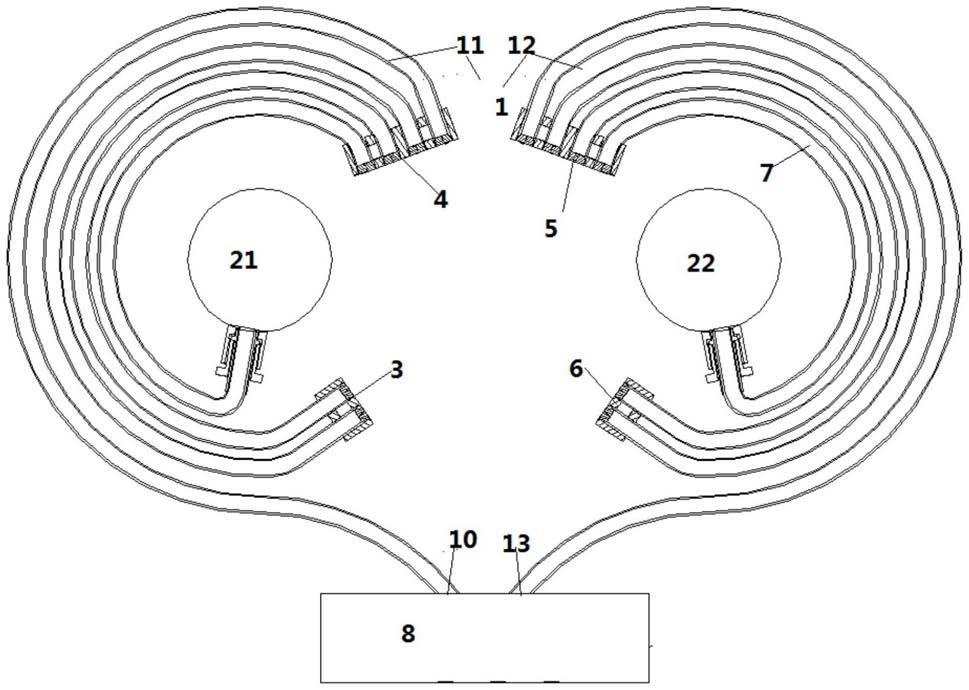
26.图1为本发明集热装置的主视图。
27.图2-1为本发明集热系统的集热主视图。
28.图2-2为本发明集热系统的不集热主视图。
29.图2-3为本发明优选的集热装置的集热主视图。
30.图2-4为本发明优选的集热装置的不集热主视图。
31.图3是本发明图1集热装置的左侧观测视图。
32.图4是本发明图1集热装置的底部观察视图。
33.图5是本发明集热装置放热管组错列布置结构示意图。
34.图6是集热装置尺寸结构示意图。
35.图7为优选的液压泵的剖视图。
36.图中:1、放热管组,左放热管组11、右放热管组12、21、左上管,22,右上管,3、自由端,4、自由端,5、自由端,6、自由端,7、放热管,8、集热管箱,9、箱体,10第一管口,13第二管口,左回流管14,右回流管15,16反射镜,17支撑件;24、右液压泵,25、左液压泵,26、右液压装置,27、左液压装置,28、右伸缩杆,29、左伸缩杆,30、偏心轮,31、单向阀,32、油缸,33、截止阀,34、柱塞。
具体实施方式
37.下面结合附图对本发明的具体实施方式做详细的说明。
38.本文中,如果没有特殊说明,涉及公式的,“/”表示除法,
“×”
、“*”表示乘法。
39.如图1所示,一种集热装置,包括集热管箱8、左上管21、右上管22和放热管组1,所述放热管组1包括左放热管组11和右放热管组12,左放热管组11与左上管21和集热管箱8相连通,右放热管组12与右上管22和集热管箱8相连通,从而使得集热管箱8、左上管21、右上管22和放热管组1形成加热流体封闭循环,集热管箱8内填充相变流体,每个放热管组1包括圆弧形的多根放热管7,相邻放热管7的端部连通,使多根放热管7形成串联结构,并且使得放热管7的端部形成放热管自由端3-6;集热管箱包括第一管口10和第二管口13,第一管口10连接左放热管组11的入口,第二管口13连接右放热管组12的入口,左放热管组11的出口连接左上管21,右放热管组12的出口连接右上管22;所述第一管口10和第二管口13设置在在集热管箱8一侧。作为优选,左放热管组11和右放热管组12沿着集热管箱的中间位置对称。
40.作为优选,左上管21、右上管22和放热管组1设置在箱体9内,箱体9中设置流动的流体,所述流体优选是空气或者水。
41.作为优选,所述左上管21、右上管22与集热管箱8沿着水平方向延伸。
42.作为优选,流体沿着水平方向流动。
43.作为优选,沿着左上管21、右上管22与集热管箱8水平方向延伸上设置多个放热管组1,所述放热管组1之间是并联结构。
44.作为优选,所述左上管21与集热管箱8之间设置左回流管14,所述右上管22与集热管箱8之间设置右回流管15。作为优选,所述回流管设置在集热管箱8的两端。
45.集热管箱8内填充相变流体,优选是汽液相变流体。所述流体在集热管箱8进行加热蒸发,沿着放热管束向左上管21、右上管22流动,流体受热后会产生体积膨胀,从而形成蒸汽,而蒸汽的体积远远大于水,因此形成的蒸汽会在盘管内进行快速冲击式的流动。因为体积膨胀以及蒸汽的流动,能够诱导放热管自由端产生振动,换热管自由端在振动的过程
中将该振动传递至箱体9内的换热流体,流体也会相互之间产生扰动,从而使得周围的换热流体形成扰流,破坏边界层,从而实现强化传热的目的。流体在左右上管冷凝放热后又通过回流管回流到集热管箱。
46.本发明通过对现有技术进行改进,将上管和放热管组分别设置为左右分布的两个,使得左右两侧分布的放热管组都能进行振动换热除垢,从而扩大换热振动的区域,越能够使得振动更加均匀,换热效果更加均匀,增加换热面积,强化换热和除垢效果。
47.上述结构已经进行了专利申请,本技术是对上述结构进行进一步改进,增强除垢以及换热效果。
48.在太阳能集热器的运行中,虽然上述结构具有弹性振动除垢效果,但是长时间运行发现除垢效果需要进一步改进。
49.研究以及实践中发现,持续性的稳定性的集热会导致内部换热部件的流体形成稳定性,即流体不再流动或者流动性很少,或者流量稳定,导致放热管组1振动性能大大减弱,从而影响管组1的除垢以及加热的效率。例如白天持续的集热,或者晚上持续不集热,导致除垢效果下降,在先申请中采取了白天持续的集热,或者晚上电加热除垢,上述对于白天的集热效果具有很大的提高。但是上述结构需要单独设置一个电加热装置,而且需要设计复杂的电加热相关的装配,导致结构复杂,因此需要对上述集热装置进行如下改进。
50.在本发明人的在先申请中,提出了一种周期性以及参数或者参数差的加热方式,通过周期性的加热方式来不断的促进盘管的振动,从而提高加热效率和除垢效果。但是,通过变化来调整管束的振动,会出现滞后性以及周期会出现过长或者过短的情况。因此本发明对前面的申请进行了改进,对振动进行智能型控制,从而使得内部的流体能够实现频繁性的振动,从而实现很好的除垢效果。
51.本发明针对在先研究的技术中的不足,提供一种新式的智能控制振动的除垢集热器。该集热器能够实现很好的除垢效果。
52.所述太阳能集热器包括除垢阶段,在除垢阶段,集热器采取如下方式运行:
53.一、基于压力模式识别
54.作为优选,集热装置内部设置压力感知元件,用于检测集热装置内部的压力,所述压力感知元件与控制器进行数据连接,所述压力数据实时存储在数据库中,采用一维深度卷积神经网络提取数据特征,并进行模式识别,从而控制是否对集热管箱进行集热以进行除垢。
55.所述基于压力模式识别包括如下步骤:
56.1、数据准备:对数据库中的集热装置的压力数据进行重新审查和校验,对缺失数据、无效数据、不一致数据进行纠正,保证数据的正确性以及逻辑上的一致性。
57.2、生成数据集:将准备好的数据分成训练集/训练集标签、检测集/检测集标签。
58.3、网络训练:将训练集数据输入卷积神经网络,不断经过卷积、池化,得到特征向量,送入全连接网络。通过计算网络的输出与训练集标签,得到网络误差,利用误差反向传播算法,不断修正网络权值、偏置、卷积系数、池化系数,使误差满足设定的精度要求,网络训练完成。
59.4、网络检测:将检测集数据输入到已经训练好的网络中,输出检测结果标签。
60.5、集热器运行:根据检测结果标签控制是否对集热管箱进行集热以进行除垢。
61.本发明提供了一种新的智能控制集热装置振动除垢的系统,基于机器学习与模式识别的理论方法,根据集热装置不同的运行工况,利用集中集热装置实时监控系统中具有时间相关性的压力数据,设计出相应的集热装置工作模式(加热模式/不加热模式),用大量的压力数据训练深度卷积神经网络,从而进行集热装置集热控制。
62.作为优选,数据准备步骤具体包含如下处理:
63.1)缺失数据的处理:由于网络传输的故障,数据库中会出现缺失值。对缺失的数据值,采用估算的方法,用样本均值代替缺失值;
64.2)无效数据的处理:由于传感器的故障,导致数据库中的压力数据出现无效值,比如负值或者超出了理论上的最大值,此时对于这些值,将其从数据库中删除;
65.3)不一致数据的处理:借助数据库管理系统的完整性约束机制,检查不一致数据,然后参考数据库中相应的数据值进行纠正。作为一个优选,在集热装置中,室外温度高的集热压力一定大于室外温度低的集热压力,如果数据库中室外温度高的集热压力小于室外温度低的集热压力,此时可以借助数据库管理系统的完整性约束中的检查约束机制,给出用户错误提示,用户根据错误提示,用预估数据或者相应温度的临界压力数据值代替这种不一致数据的压力数据值。
66.作为优选,生成数据集步骤包括如下步骤:
67.1)生成训练集数据及标签:根据集热装置不同的运行工况,从数据库中读取对应工况的压力数据值,生成各种工况状态下的训练集数据以及工况标签。作为优选,在具体应用中,我们将运行工况分为标签为1,进行集热装置集热,标签为2,集热装置不集热。程序根据不同的工况,自动生成工况标签;
68.作为优选,所述数据包括不同工况下内部的集热装置内的流体的蒸发基本达到了饱和的数据。工况包括季节、天气、时间等至少之一。
69.2)生成检测集数据及标签:根据集热装置不同的运行工况,从数据库中读取对应工况的压力数据值,生成各种工况状态下的检测集数据以及工况标签。其中工况标签同训练集工况标签一样,由程序根据运行工况自动生成。
70.作为优选可以判断是否集热装置内流体的蒸发达到了饱和,未达到了饱和,标签为1,达到了饱和,标签为2。
71.网络训练具体步骤如下:
72.1)读入一组训练集数据d,其大小为[m
×1×
n],其中m表示训练批的大小,1
×
n表示一维的训练数据;
[0073]
2)对读入的训练数据进行第一次卷积操作,得到特征图t。初始化卷积核g的系数,设g的大小为[p
×1×
q],其中p表示卷积核的数量,[1
×
q]表示卷积核的尺寸,得到的卷积结果为t=∑(d*g),特征图的大小为[m
×1×
n
×
q];
[0074]
3)对卷积操作得到的特征图t进行最大池化操作,得到特征图z。初始化池化系数,给定池化步长为p,池化窗口大小为k,最后得到的特征图z的大小为[m
×1×
(n/p)
×
q],池化过程降低了数据的维度;
[0075]
4)重复以上2)-3)步骤,反复进行卷积与池化操作,得到特征向量x,此时卷积神经网络的特征提取过程完成;
[0076]
5)初始化全连接网络的权值矩阵w和偏置b,将提取到的特征向量x送入全连接网
络,与权值矩阵w、偏置b进行运算,得到网络输出y=∑(w
×
x+b);
[0077]
6)将网络得到的输出y与训练集标签l相减,得到网络误差e=y-l,对网络误差进行求导,利用该导数反向传播,依次修正全连接网络的权值w、偏置b、各层池化系数、各层卷积系数;
[0078]
7)重复上述过程,直到网络误差e满足精度要求,网络训练过程完成,生成卷积神经网络模型。
[0079]
网络检测步骤具体步骤如下:
[0080]
1)加载已经训练好的卷积神经网络模型,此时卷积神经网络的卷积核系数、池化系数、网络权值w,偏置b都已经训练完毕;
[0081]
2)将检测数据集输入已经训练好的卷积神经网络中,输出检测结果。例如根据输出的标签,
[0082]
就可以判断运行类型。比如1代表集热器集热,2代表集热器不集热等等。
[0083]
本发明提出了一种控制集热装置集热的新方法,充分利用集中集热装置在线监测数据,检测速度快,成本低。
[0084]
本发明将数据处理技术、机器学习与模式识别理论有机融合,可以提高集热装置运行的准确性。
[0085]
具体卷积神经网络的工作过程如下:
[0086]
1)输入一组训练集数据d,其大小为[m
×1×
n],其中m表示训练batch的大小,1
×
n表示一维的训练数据;
[0087]
2)对读入的训练数据进行第一次卷积操作,得到特征图t。初始化卷积核g的系数,设g的大小为[p
×1×
q],其中p表示卷积核的数量,[1
×
q]表示卷积核的尺寸,得到的卷积结果为t=∑(d*g),特征图的大小为[m
×1×
n
×
q];
[0088]
3)对卷积操作得到的特征图t进行最大池化操作,得到特征图z。初始化池化系数,设池化步长为p,池化窗口大小为k,最后得到的特征图z的大小为[m
×1×
(n/p)
×
q],池化过程降低了数据的维度;
[0089]
4)重复以上2)-3)步骤,反复进行卷积与池化操作,得到特征向量;
[0090]
通过压力感知元件检测的压力的模式识别,能够在内部的流体的蒸发基本达到了饱和,内部流体的体积也基本变化不大,此种情况下,内部流体相对稳定,此时的管束振动性变差,因此需要进行调整,使其进行振动,从而进行除垢。使得流体进行体积变小从而实现振动。当压力降低到一定程度时,此时内部流体又开始进入稳定状态,此时需要加热使得流体重新蒸发膨胀,因此需要进行启动集热管箱进行加热。
[0091]
相对于前面的参数以及参数差,数据更加准确。
[0092]
作为优选,压力感知元件设置在集热管箱8内。
[0093]
作为优选,压力感知元件设置在自由端。通过设置在自由端,能够感知自由端的压力变化,从而实现更好的控制和调节。
[0094]
二、基于温度识别模式
[0095]
作为优选,集热装置内部设置温度感知元件,用于检测集热装置内部的温度,所述温度感知元件与控制器进行数据连接,所述温度数据实时存储在数据库中,采用一维深度卷积神经网络提取数据特征,并进行模式识别,从而控制是否对集热管箱进行集热以进行
除垢。
[0096]
所述基于温度模式识别包括如下步骤:
[0097]
1、数据准备:对数据库中的集热装置的温度数据进行重新审查和校验,对缺失数据、无效数据、不一致数据进行纠正,保证数据的正确性以及逻辑上的一致性。
[0098]
2、生成数据集:将准备好的数据分成训练集/训练集标签、检测集/检测集标签。
[0099]
3、网络训练:将训练集数据输入卷积神经网络,不断经过卷积、池化,得到特征向量,送入全连接网络。通过计算网络的输出与训练集标签,得到网络误差,利用误差反向传播算法,不断修正网络权值、偏置、卷积系数、池化系数,使误差满足设定的精度要求,网络训练完成。
[0100]
4、网络检测:将检测集数据输入到已经训练好的网络中,输出检测结果标签。
[0101]
5、集热器运行:根据检测结果标签控制是否对集热管箱进行集热以进行除垢。
[0102]
本发明提供了一种新的智能控制集热装置振动除垢的系统,基于机器学习与模式识别的理论方法,根据集热装置不同的运行工况,利用集中集热装置实时监控系统中具有时间相关性的温度数据,设计出相应的集热装置工作模式(加热模式/不加热模式),用大量的温度数据训练深度卷积神经网络,从而进行集热装置集热控制。
[0103]
作为优选,数据准备步骤具体包含如下处理:
[0104]
1)缺失数据的处理:由于网络传输的故障,数据库中会出现缺失值。对缺失的数据值,采用估算的方法,用样本均值代替缺失值;
[0105]
2)无效数据的处理:由于传感器的故障,导致数据库中的温度数据出现无效值,比如负值或者超出了理论上的最大值,此时对于这些值,将其从数据库中删除;
[0106]
3)不一致数据的处理:借助数据库管理系统的完整性约束机制,检查不一致数据,然后参考数据库中相应的数据值进行纠正。作为一个优选,在集热装置中,室外温度高的集热温度一定大于室外温度低的集热温度,如果数据库中室外温度高的集热温度小于室外温度低的集热温度,此时可以借助数据库管理系统的完整性约束中的检查约束机制,给出用户错误提示,用户根据错误提示,用预估数据或者相应温度的临界温度数据值代替这种不一致数据的温度数据值。
[0107]
作为优选,生成数据集步骤包括如下步骤:
[0108]
1)生成训练集数据及标签:根据集热装置不同的运行工况,从数据库中读取对应工况的温度数据值,生成各种工况状态下的训练集数据以及工况标签。作为优选,在具体应用中,我们将运行工况分为标签为1,进行集热装置集热,标签为2,集热装置不集热。程序根据不同的工况,自动生成工况标签;
[0109]
作为优选,所述数据包括不同工况下内部的集热装置内的流体的蒸发基本达到了饱和的数据。工况包括季节、天气、时间等至少之一。
[0110]
2)生成检测集数据及标签:根据集热装置不同的运行工况,从数据库中读取对应工况的温度数据值,生成各种工况状态下的检测集数据以及工况标签。其中工况标签同训练集工况标签一样,由程序根据运行工况自动生成。
[0111]
作为优选可以判断是否集热装置内流体的蒸发达到了饱和,未达到了饱和,标签为1,达到了饱和,标签为2。
[0112]
网络训练具体步骤如下:
[0113]
1)读入一组训练集数据d,其大小为[m
×1×
n],其中m表示训练批的大小,1
×
n表示一维的训练数据;
[0114]
2)对读入的训练数据进行第一次卷积操作,得到特征图t。初始化卷积核g的系数,设g的大小为[p
×1×
q],其中p表示卷积核的数量,[1
×
q]表示卷积核的尺寸,得到的卷积结果为t=∑(d*g),特征图的大小为[m
×1×
n
×
q];
[0115]
3)对卷积操作得到的特征图t进行最大池化操作,得到特征图z。初始化池化系数,给定池化步长为p,池化窗口大小为k,最后得到的特征图z的大小为[m
×1×
(n/p)
×
q],池化过程降低了数据的维度;
[0116]
4)重复以上2)-3)步骤,反复进行卷积与池化操作,得到特征向量x,此时卷积神经网络的特征提取过程完成;
[0117]
5)初始化全连接网络的权值矩阵w和偏置h,将提取到的特征向量x送入全连接网络,与权值矩阵w、偏置b进行运算,得到网络输出y=∑(w
×
x+b);
[0118]
6)将网络得到的输出y与训练集标签l相减,得到网络误差e=y-l,对网络误差进行求导,利用该导数反向传播,依次修正全连接网络的权值w、偏置b、各层池化系数、各层卷积系数;
[0119]
7)重复上述过程,直到网络误差e满足精度要求,网络训练过程完成,生成卷积神经网络模型。
[0120]
网络检测步骤具体步骤如下:
[0121]
1)加载已经训练好的卷积神经网络模型,此时卷积神经网络的卷积核系数、池化系数、网络权值w,偏置b都已经训练完毕;
[0122]
2)将检测数据集输入已经训练好的卷积神经网络中,输出检测结果。例如根据输出的标签,就可以判断运行类型。比如1代表集热器集热,2代表集热器不集热等等。
[0123]
本发明提出了一种控制集热装置集热的新方法,充分利用集中集热装置在线监测数据,检测速度快,成本低。
[0124]
本发明将数据处理技术、机器学习与模式识别理论有机融合,可以提高集热装置运行的准确性。
[0125]
具体卷积神经网络的工作过程如下:
[0126]
1)输入一组训练集数据d,其大小为[m
×1×
n],其中m表示训练batch的大小,1
×
n表示一维的训练数据;
[0127]
2)对读入的训练数据进行第一次卷积操作,得到特征图t。初始化卷积核g的系数,设g的大小为[p
×1×
q],其中p表示卷积核的数量,[1
×
q]表示卷积核的尺寸,得到的卷积结果为τ-∑(d*g),特征图的大小为[m
×1×
n
×
q];
[0128]
3)对卷积操作得到的特征图t进行最大池化操作,得到特征图z。初始化池化系数,设池化步长为p,池化窗口大小为k,最后得到的特征图z的大小为[m
×1×
(n/p)
×
q],池化过程降低了数据的维度;
[0129]
4)重复以上2)-3)步骤,反复进行卷积与池化操作,得到特征向量;
[0130]
通过温度感知元件检测的温度的模式识别,能够在内部的流体的蒸发基本达到了饱和,内部流体的体积也基本变化不大,此种情况下,内部流体相对稳定,此时的管束振动性变差,因此需要进行调整,使其进行振动,从而进行除垢。使得流体进行体积变小从而实
现振动。当温度降低到一定程度时,此时内部流体又开始进入稳定状态,此时需要加热使得流体重新蒸发膨胀,因此需要进行启动集热管箱进行加热。
[0131]
作为优选,温度感知元件设置在集热管箱8内。
[0132]
作为优选,温度感知元件设置在自由端。通过设置在自由端,能够感知自由端的温度变化,从而实现更好的控制和调节。
[0133]
三、基于液位自主调节振动
[0134]
作为优选,集热管箱8内部设置液位感知元件,用于检测集热管箱8内部的液位,所述液位感知元件与控制器进行数据连接,所述液位数据实时存储在数据库中,采用一维深度卷积神经网络提取数据特征,并进行模式识别,从而控制是否对集热管箱进行集热以进行除垢。
[0135]
所述基于液位模式识别包括如下步骤:
[0136]
1、数据准备:对数据库中的集热管箱8的液位数据进行重新审查和校验,对缺失数据、无效数据、不一致数据进行纠正,保证数据的正确性以及逻辑上的一致性。
[0137]
2、生成数据集:将准备好的数据分成训练集/训练集标签、检测集/检测集标签。
[0138]
3、网络训练:将训练集数据输入卷积神经网络,不断经过卷积、池化,得到特征向量,送入全连接网络。通过计算网络的输出与训练集标签,得到网络误差,利用误差反向传播算法,不断修正网络权值、偏置、卷积系数、池化系数,使误差满足设定的精度要求,网络训练完成。
[0139]
4、网络检测:将检测集数据输入到已经训练好的网络中,输出检测结果标签。
[0140]
5、集热器运行:根据检测结果标签控制是否对集热管箱进行集热以进行除垢。
[0141]
本发明提供了一种新的智能控制集热装置振动除垢的系统,基于机器学习与模式识别的理论方法,根据集热装置不同的运行工况,利用集中集热装置实时监控系统中具有时间相关性的液位数据,设计出相应的集热装置工作模式(加热模式/不加热模式),用大量的液位数据训练深度卷积神经网络,从而进行集热装置集热控制。
[0142]
作为优选,数据准备步骤具体包含如下处理:
[0143]
1)缺失数据的处理:由于网络传输的故障,数据库中会出现缺失值。对缺失的数据值,采用估算的方法,用样本均值代替缺失值;
[0144]
2)无效数据的处理:由于传感器的故障,导致数据库中的液位数据出现无效值,比如负值或者超出了理论上的最大值,此时对于这些值,将其从数据库中删除;
[0145]
3)不一致数据的处理:借助数据库管理系统的完整性约束机制,检查不一致数据,然后参考数据库中相应的数据值进行纠正。作为一个优选,在集热装置中,室外温度高的集热液位一定大于室外温度低的集热液位,如果数据库中室外温度高的集热液位小于室外温度低的集热液位,此时可以借助数据库管理系统的完整性约束中的检查约束机制,给出用户错误提示,用户根据错误提示,用预估数据或者相应液位的临界液位数据值代替这种不一致数据的液位数据值。
[0146]
作为优选,生成数据集步骤包括如下步骤:
[0147]
1)生成训练集数据及标签:根据集热装置不同的运行工况,从数据库中读取对应工况的液位数据值,生成各种工况状态下的训练集数据以及工况标签。作为优选,在具体应用中,我们将运行工况分为标签为1,进行集热装置集热,其标签为2,集热装置不集热。程序
根据不同的工况,自动生成工况标签;
[0148]
作为优选,所述数据包括不同工况下内部的集热装置内的流体的蒸发基本达到了饱和的数据。工况包括季节、天气、时间等至少之一因素。
[0149]
2)生成检测集数据及标签:根据集热装置不同的运行工况,从数据库中读取对应工况的液位数据值,生成各种工况状态下的检测集数据以及工况标签。其中工况标签同训练集工况标签一样,由程序根据运行工况自动生成。
[0150]
作为优选可以判断是否集热装置内流体的蒸发达到了饱和,未达到了饱和,标签为1,达到了饱和,标签为2。
[0151]
网络训练具体步骤如下:
[0152]
1)读入一组训练集数据d,其大小为[m
×1×
n],其中m表示训练批的大小,1
×
n表示一维的训练数据;
[0153]
2)对读入的训练数据进行第一次卷积操作,得到特征图t。初始化卷积核g的系数,设g的大小为[p
×1×
q],其中p表示卷积核的数量,[1
×
q]表示卷积核的尺寸,得到的卷积结果为t=∑(d*g),特征图的大小为[m
×1×
n
×
q];
[0154]
3)对卷积操作得到的特征图t进行最大池化操作,得到特征图z。初始化池化系数,给定池化步长为p,池化窗口大小为k,最后得到的特征图z的大小为[m
×1×
(n/p)
×
q],池化过程降低了数据的维度;
[0155]
4)重复以上2)-3)步骤,反复进行卷积与池化操作,得到特征向量x,此时卷积神经网络的特征提取过程完成;
[0156]
5)初始化全连接网络的权值矩阵w和偏置b,将提取到的特征向量x送入全连接网络,与权值矩阵w、偏置b进行运算,得到网络输出y=∑(w
×
x+b);
[0157]
6)将网络得到的输出y与训练集标签l相减,得到网络误差e=y-l,对网络误差进行求导,利用该导数反向传播,依次修正全连接网络的权值w、偏置b、各层池化系数、各层卷积系数;
[0158]
7)重复上述过程,直到网络误差e满足精度要求,网络训练过程完成,生成卷积神经网络模型。
[0159]
网络检测步骤具体步骤如下:
[0160]
1)加载已经训练好的卷积神经网络模型,此时卷积神经网络的卷积核系数、池化系数、网络权值w,偏置b都已经训练完毕;
[0161]
2)将检测数据集输入已经训练好的卷积神经网络中,输出检测结果。例如根据输出的标签,就可以判断运行类型。比如1代表集热器集热,2代表集热器不集热等等。
[0162]
本发明提出了一种控制集热装置集热的新方法,充分利用集中集热装置在线监测数据,检测速度快,成本低。
[0163]
本发明将数据处理技术、机器学习与模式识别理论有机融合,可以提高集热装置运行的准确性。
[0164]
具体卷积神经网络的工作过程如下:
[0165]
1)输入一组训练集数据d,其大小为[m
×1×
n],其中m表示训练batch的大小,1
×
n表示一维的训练数据;
[0166]
2)对读入的训练数据进行第一次卷积操作,得到特征图t。初始化卷积核g的系数,
设g的大小为[p
×1×
q],其中p表示卷积核的数量,[1
×
q]表示卷积核的尺寸,得到的卷积结果为t=∑(d*g),特征图的大小为[m
×1×
n
×
q];
[0167]
3)对卷积操作得到的特征图t进行最大池化操作,得到特征图z。初始化池化系数,设池化步长为p,池化窗口大小为k,最后得到的特征图z的大小为[m
×1×
(n/p)
×
q],池化过程降低了数据的维度;
[0168]
4)重复以上2)-3)步骤,反复进行卷积与池化操作,得到特征向量;
[0169]
通过液位感知元件检测的液位的模式识别,能够在内部的流体的蒸发基本达到了饱和,内部流体的体积也基本变化不大,此种情况下,内部流体相对稳定,此时的管束振动性变差,因此需要进行调整,使其进行振动,从而进行除垢。使得流体进行体积变小从而实现振动。当液位降低到一定程度时,此时内部流体又开始进入稳定状态,此时需要加热使得流体重新蒸发膨胀,因此需要进行启动集热管箱进行加热。
[0170]
四、基于速度自主调节振动
[0171]
作为优选,管束自由端内部设置速度感知元件,用于检测管束自由端内的流体的流速,所述速度感知元件与控制器进行数据连接,所述速度数据实时存储在数据库中,采用一维深度卷积神经网络提取数据特征,并进行模式识别,从而控制是否对集热管箱进行集热以进行除垢。
[0172]
所述基于速度模式识别包括如下步骤:
[0173]
1、数据准备:对数据库中的集热管箱8的速度数据进行重新审查和校验,对缺失数据、无效数据、不一致数据进行纠正,保证数据的正确性以及逻辑上的一致性。
[0174]
2、生成数据集:将准备好的数据分成训练集/训练集标签、检测集/检测集标签。
[0175]
3、网络训练:将训练集数据输入卷积神经网络,不断经过卷积、池化,得到特征向量,送入全连接网络。通过计算网络的输出与训练集标签,得到网络误差,利用误差反向传播算法,不断修正网络权值、偏置、卷积系数、池化系数,使误差满足设定的精度要求,网络训练完成。
[0176]
4、网络检测:将检测集数据输入到已经训练好的网络中,输出检测结果标签。
[0177]
5、集热器运行:根据检测结果标签控制是否对集热管箱进行集热以进行除垢。
[0178]
本发明提供了一种新的智能控制集热装置振动除垢的系统,基于机器学习与模式识别的理论方法,根据集热装置不同的运行工况,利用集中集热装置实时监控系统中具有时间相关性的速度数据,设计出相应的集热装置工作模式(加热模式/不加热模式),用大量的速度数据训练深度卷积神经网络,从而进行集热装置集热控制。
[0179]
作为优选,数据准备步骤具体包含如下处理:
[0180]
1)缺失数据的处理:由于网络传输的故障,数据库中会出现缺失值。对缺失的数据值,采用估算的方法,用样本均值代替缺失值;
[0181]
2)无效数据的处理:由于传感器的故障,导致数据库中的速度数据出现无效值,比如负值或者超出了理论上的最大值,此时对于这些值,将其从数据库中删除;
[0182]
3)不一致数据的处理:借助数据库管理系统的完整性约束机制,检查不一致数据,然后参考数据库中相应的数据值进行纠正。作为一个优选,在集热装置中,室外温度高的集热速度一定大于室外温度低的集热速度,如果数据库中室外温度高的集热速度小于室外温度低的集热速度,此时可以借助数据库管理系统的完整性约束中的检查约束机制,给出用
户错误提示,用户根据错误提示,用预估数据或者相应速度的临界速度数据值代替这种不一致数据的速度数据值。
[0183]
作为优选,生成数据集步骤包括如下步骤:
[0184]
1)生成训练集数据及标签:根据集热装置不同的运行工况,从数据库中读取对应工况的速度数据值,生成各种工况状态下的训练集数据以及工况标签。作为优选,在具体应用中,我们将运行工况分为标签为1,进行集热装置集热,标签为2,集热装置不集热。程序根据不同的工况,自动生成工况标签;
[0185]
作为优选,所述数据包括不同工况下内部的集热装置内的流体的蒸发基本达到了饱和的数据。工况包括季节、天气、时间等至少之一因素。
[0186]
2)生成检测集数据及标签:根据集热装置不同的运行工况,从数据库中读取对应工况的速度数据值,生成各种工况状态下的检测集数据以及工况标签。其中工况标签同训练集工况标签一样,由程序根据运行工况自动生成。
[0187]
作为优选可以判断是否集热装置内流体的蒸发达到了饱和,未达到了饱和,标签为1,达到了饱和,标签为2。
[0188]
网络训练具体步骤如下:
[0189]
1)读入一组训练集数据d,其大小为[m
×1×
n],其中m表示训练批的大小,1
×
n表示一维的训练数据;
[0190]
2)对读入的训练数据进行第一次卷积操作,得到特征图t。初始化卷积核g的系数,设g的大小为[p
×1×
q],其中p表示卷积核的数量,[1
×
q]表示卷积核的尺寸,得到的卷积结果为t=∑(d*g),特征图的大小为[m
×1×
n
×
q];
[0191]
3)对卷积操作得到的特征图t进行最大池化操作,得到特征图z。初始化池化系数,给定池化步长为p,池化窗口大小为k,最后得到的特征图z的大小为[m
×1×
(n/p)
×
q],池化过程降低了数据的维度;
[0192]
4)重复以上2)-3)步骤,反复进行卷积与池化操作,得到特征向量x,此时卷积神经网络的特征提取过程完成;
[0193]
5)初始化全连接网络的权值矩阵w和偏置b,将提取到的特征向量x送入全连接网络,与权值矩阵w、偏置b进行运算,得到网络输出y=∑(w
×
x+b);
[0194]
6)将网络得到的输出y与训练集标签l相减,得到网络误差e=y-l,对网络误差进行求导,利用该导数反向传播,依次修正全连接网络的权值w、偏置b、各层池化系数、各层卷积系数;
[0195]
7)重复上述过程,直到网络误差e满足精度要求,网络训练过程完成,生成卷积神经网络模型。
[0196]
网络检测步骤具体步骤如下:
[0197]
1)加载已经训练好的卷积神经网络模型,此时卷积神经网络的卷积核系数、池化系数、网络权值w,偏置b都已经训练完毕;
[0198]
2)将检测数据集输入已经训练好的卷积神经网络中,输出检测结果。例如根据输出的标签,就可以判断运行类型。比如1代表集热器集热,2代表集热器不集热等等。
[0199]
本发明提出了一种控制集热装置集热的新方法,充分利用集中集热装置在线监测数据,检测速度快,成本低。
[0200]
本发明将数据处理技术、机器学习与模式识别理论有机融合,可以提高集热装置运行的准确性。
[0201]
具体卷积神经网络的工作过程如下:
[0202]
1)输入一组训练集数据d,其大小为[m
×1×
n],其中m表示训练batch的大小,1
×
n表示一维的训练数据;
[0203]
2)对读入的训练数据进行第一次卷积操作,得到特征图t。初始化卷积核g的系数,设g的大小为[p
×1×
q],其中p表示卷积核的数量,[1
×
q]表示卷积核的尺寸,得到的卷积结果为t=∑(d*g),特征图的大小为[m
×1×
n
×
q];
[0204]
3)对卷积操作得到的特征图t进行最大池化操作,得到特征图z。初始化池化系数,设池化步长为p,池化窗口大小为k,最后得到的特征图z的大小为[m
×1×
(n/p)
×
q],池化过程降低了数据的维度;
[0205]
4)重复以上2)-3)步骤,反复进行卷积与池化操作,得到特征向量;
[0206]
通过速度感知元件检测的速度的模式识别,能够在内部的流体的蒸发基本达到了饱和,内部流体的体积也基本变化不大,此种情况下,内部流体相对稳定,此时的管束振动性变差,因此需要进行调整,使其进行振动,从而进行除垢。使得流体进行体积变小从而实现振动。当速度降低到一定程度时,此时内部流体又开始进入稳定状态,此时需要加热使得流体重新蒸发膨胀,因此需要进行启动集热管箱进行加热。
[0207]
作为一个优选,通过反射镜进行旋转的方式,对集热管箱进行集热或者不集热。当需要集热的时候,反射镜的反射面面向太阳,当不需要集热的时候,反射镜的反射面不面向太阳。此种方式可以采用常规的太阳光跟踪系统的旋转反射镜的方式来实现,在此就不必详细说明。
[0208]
作为优选,可以采取另一个实施例,采取集热管箱是否位于反射镜焦点的方式来完成是否对集热管箱进行集热或者不集热的操作。当需要集热的时候,集热管箱位于反射镜的焦点,当不需要集热的时候,集热管箱不位于反射镜的焦点。
[0209]
如图1所示,所述反射镜16沿着中部分为两部分,分别是第一部分161和第二部分162,第一部分161和第二部分162,如图2所示。所述支撑件17是支撑柱,设置在集热管箱8的下部,液压伸缩杆171,172分别从支撑柱上伸出延伸连接到第一部分161和第二部分162。用来驱动第一部分和第二部分分开或者合并。当第一部分和第二部分合并在一起时,所述的反射镜16构成一个完整的反射镜,所述集热管箱位于反射镜16的焦点位置处,用于对集热管箱进行集热。当第一部分和第二部分分开时,所述的集热管箱不位于第一部分和第二部分的焦点,不对集热管箱进行加热。
[0210]
作为优选,所述的液压伸缩杆连接驱动器,通过驱动器驱动液压伸缩杆的伸缩,通过液压伸缩杆的伸缩来使得反射镜的焦点发生位置变化。
[0211]
所述液压伸缩杆通过枢转的方式连接到支撑件17上。
[0212]
作为一个改进的实施例,如图2-3、2-4所示。所述集热装置包括右液压泵24,左液压泵25,右液压装置26和左液压装置27,右液压装置26和左液压装置27上部设置伸缩杆35、36,所述伸缩杆通过枢转方式连接到第二部分162和第一部分161的下部,所述右液压泵24,左液压泵25分别驱动右液压装置26和左液压装置27的上升和下降。
[0213]
作为优选,所述的装置还包括右支撑杆28和左支撑缩杆29,所述右支撑杆28和左
支撑杆29包括第一部件和第二部件,第一部件位于下部,第一部件下端通过枢转方式连接在支撑杆17上,第二部件是伸缩杆,伸缩杆的上端通过枢转方式连接到第一部分162和第二部分162。所述伸缩杆可以在第一部件内伸缩。所述右支撑杆28和左支撑杆29用于支撑反射镜,使得反射镜保持在下部相应的位置。例如反射镜第一部分和第二部分合为一体时候,通过右支撑杆28和左支撑杆29的支撑使其保持在相应位置,使得集热管箱8位于反射镜焦点位置。
[0214]
作为优选,所述的第一部件是杆,所述杆中间开孔,从而使得伸缩杆能够在第一部件内伸缩。
[0215]
作为优选,右支撑杆28和左支撑缩杆29也采用液压的方式,单独设置液压泵,所述第一部件是液压装置,通过液压泵驱动伸缩杆进行伸缩。具体结构和右液压装置26和左液压装置27类似。
[0216]
图7展示了液压泵的具体结构。如图7所示,液压泵包括偏心轮30、单向阀31、油缸32、截止阀33、柱塞34,偏心轮30连接柱塞34。柱塞34设置在柱塞腔38内,柱塞腔38与液压泵连通。液压泵包括腔体,腔体上部设置伸缩杆,伸缩杆下端是与液压泵腔体内径相同的板状结构39,板状结构中部延伸出的杆状结构40,杆状结构40伸出液压泵腔体连接反射镜。
[0217]
腔体下部是油缸32,油缸和伸缩杆之间设置两个单向阀31,供液体从下部油缸进入上部,来推动伸缩杆向上移动;两个单向阀分别设置在柱塞腔与液压泵连通位置的上部和下部;所述两个单向阀31的与柱塞腔与液压泵连通位置的相对的一侧(远离柱塞腔与液压泵连通位置的一侧)设置隔离壁37,所述隔离壁37与腔体的柱塞腔与液压泵连通位置的相对的一侧壁之间具有一定的距离,并设置截止阀33。通过截止阀的打开以便供液体从上部流入下部油缸32。
[0218]
当要使反光镜升高使装置停止集热时,可以驱动右液压泵24以及左液压泵25,偏心轮30会带动柱塞34往复运动。柱塞34右移时,缸体中产生真空,油液通过单向阀吸入,完成吸油过程。柱塞34左移时,缸体内的油会通过单向阀31输入到液压系统中。凸轮连续旋转,便可使反光镜升高。
[0219]
当要使反光镜下降使装置开始集热时,便可打开截止阀33,液压系统上部的油便会流回油缸中,于是反光镜在重力的作用下便会归于原位。
[0220]
当然,液压泵也是现有技术一种非常成熟的技术,图7的实施例仅仅是简单的介绍,不作为限定。现有技术中的所有液压泵都可以用来使用。
[0221]
除垢时间优选可以是太阳能集热器运行一段时间后进行。优选是当集热效果变差的时候进行。
[0222]
作为优选,所述左放热管组的放热管是以左上管的轴线为圆心分布,所述右放热管组的放热管是以右上管的轴线为圆心分布。通过将左右上管设置为圆心,可以更好的保证放热管的分布,使得振动和加热均匀。
[0223]
作为优选,所述左放热管组、右放热管组均为多个。
[0224]
作为优选,左放热管组和右放热管组沿着集热管箱的竖直方向轴心所在的面镜像对称。通过如此设置,能够使得换热的放热管分布更加合理均匀,提高换热效果。
[0225]
作为优选,集热管箱8是扁平管结构。通过设置扁平管结构使得吸热面积增加。使得即使安装位置有点偏远,也能保证集热管箱8位于反射镜焦点位置处。
[0226]
作为优选,左放热管组11和右放热管组12在水平延伸方向上错列分布,如图5所示。通过错列分布,能够使得在不同长度上进行振动放热和除垢,使得振动更加均匀,强化换热和除垢效果。
[0227]
作为优选,集热装置下部设置反射镜16,所述集热管箱位于反射镜16的焦点位置处,所述左放热管组和右放热管组位于流体通道中。从而形成一种太阳能集热系统。
[0228]
作为优选,包括支撑件17,支撑件17支撑集热装置。
[0229]
作为优选,包括流体通道,流体在流体通道内流动。如图2所示,所述集热管箱8位于流体通道下端,如图2所示。左上管21、右上管22、左放热管组11和右放热管组12设置在流体通道内,通过放热加热流体通道内的流体。
[0230]
作为优选,流体的流动方向与左上管21、右上管22与集热管箱8延伸的方向相同。通过如此设置,使得流体在流动的时候冲刷放热管组,尤其是放热管组自由端,从而使得自由端振动,从而强化传热,达到除垢的效果。
[0231]
作为优选,沿着流体通道内的流体的流动方向,所述放热管组1(例如同一侧(左侧或者右侧))设置为多个,沿着流体通道内的流体的流动方向,放热管组1(例如同一侧(左侧或者右侧))的管径不断变大。
[0232]
沿着流体的流动方向,流体温度不断的提高,从而使得换热温差不断的减小,换热能力越来越大。通过放热管组的管径变大,可以保证更多的蒸汽通过上部进入放热管组,保证沿着流体流动方向,因为蒸汽量大以及振动效果好,从而使得整体换热均匀。所有放热管组内蒸汽的分配均匀,进一步强化传热效果,使得整体振动效果均匀,换热效果增加,进一步提高换热效果以及除垢效果。
[0233]
作为优选,沿着流体通道内的流体的流动方向,放热管组(例如同一侧(左侧或者右侧))的放热管管径不断变大的幅度不断的增加。
[0234]
通过如此设置,避免流体都在前部进行换热,而使的尽量换热向后部增加,从而形成类似逆流的换热效果。通过实验发现,采取此种结构设计可以取得更好的换热效果以及除垢效果。
[0235]
作为优选,沿着流体通道内的流体的流动方向,所述同一侧(左侧或者右侧)放热管组设置为多个,从上向下方向,同一侧(左侧或者右侧)相邻放热管组的间距不断变小。具体效果类似前面的管径变化的效果。
[0236]
作为优选,沿着流体通道内的流体的流动方向,同一侧(左侧或者右侧)放热管组之间的间距不断变小的幅度不断的增加。具体效果类似前面的管径变化的效果。
[0237]
在试验中发现,左上管21、右上管22的体积、距离以及集热箱的体积可以对换热效率以及均匀性产生影响。如果集热箱的体积过小,导致蒸汽过热,热量无法及时传递到放热管以及左上管右上管,体积过大,导致蒸汽冷凝过快,也无法传递,同理左上管21、右上管22的体积必须与集热箱体积搭配相适用,否则会导致蒸汽冷凝过快或者过慢,都会导致换热情况恶化,左上管21、右上管22之间距离也会导致换热效率太差,距离太小,则放热管分布太密,也会影响换热效率,左上管21、右上管22之间距离也需要和集热箱之间的距离搭配相适用,否则他们之间的距离会影响容纳的液体或者蒸汽的体积,则对于自由端的振动会产生影响,从而影响换热。因此左上管21、右上管22的体积、距离以及集热箱的体积具有一定的关系。
[0238]
本发明是通过多个不同尺寸的热管的数值模拟以及试验数据总结出的最佳的尺寸关系。从换热效果中的换热量最大出发,计算了近200种形式。所述的尺寸关系如下:
[0239]
左上管21、右上管22的体积分别是v1,v2,集热箱的体积是v3,集热箱体底部的中点与左上管21、右上管22圆心之间形成的夹角为a,满足如下要求:
[0240]
(v1+v2)/v3=a-b*sin(a/2)
2-c*sin(a/2);其中a,b,c是参数,sin是三角正玄函数,
[0241]
0.8490<a<0.8492,0.1302<b<0.1304,0.0020<c<0.0022;作为优选,a=0.8491,b=0.1303,c=0.0021。
[0242]
作为优选,集热箱体底部的中点与左上管21、右上管22圆心之间形成的夹角a为40-120度(角度),优选为80-100度(角度)。作为优选,0.72<(v1+v2)/v3<0.85;
[0243]
左上管21的中心与右上管22的中心之间的距离为m,左上管21的管径、右上管22的半径相同,为b,放热管中最内侧放热管的轴线的半径为n1,最外侧放热管的轴线的半径为w2,
[0244]
作为优选,35<b<61mm;230<m<385mm;69<n1<121mm,119<w2<201mm。作为优选,放热管组的放热管的数量为3-5根,优选为3或4根。作为优选,放热管的半径优选为10-40mm;优选为15-35mm,进一步优选为20-30mm。
[0245]
作为优选,自由端3、4的端部之间以左集箱的中心轴线为圆心的弧度为95-130角度,优选120角度。同理自由端5、6和自由端3、4的弧度相同。通过上述优选的夹角的设计,使得自由端的振动达到最佳,从而使得加热效率达到最优。
[0246]
作为优选,v1=v2。
[0247]
在先申请的仅仅依靠左上管21的中心与右上管22的中心之间的距离为m,左上管21的管径、右上管22的半径相同,为b,放热管中最内侧放热管的轴线的半径为n1,最外侧放热管的轴线的半径为w2,本发明首次将左上管21、右上管22的体积、距离以及集热箱的体积通过优化的关系式关联起来,得到了最佳的尺寸关系。本技术的上述关系式是针对在先申请的关系式进一步改进,通过体积以及夹角的关系式,属于本发明独创的发明点。
[0248]
作为优选,放热管组1的管束是弹性管束。通过将放热管组1的管束设置弹性管束,可以进一步提高换热系数。
[0249]
所述放热管组1为多个,多个放热管组1为并联结构。
[0250]
虽然本发明已以较佳实施例披露如上,但本发明并非限定于此。任何本领域技术人员,在不脱离本发明的精神和范围内,均可作各种更动与修改,因此本发明的保护范围应当以权利要求所限定的范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1