空气调节系统和空气调节装置的控制方法与流程
1.本公开涉及一种对空气调节对象空间进行空气调节的空气调节系统和空气调节装置的控制方法。
背景技术:
2.近年,由于全球变暖等外部环境的变化的影响,提高居住环境的舒适性的需求越来越高。关于空气调节装置,将居住的人的冷热感保持为舒适的作用的重要性增加。为了实现舒适性,提出了pmv(predicted mean vote:预测平均投票数)这样的舒适指标。公开了一种对处于空气调节对象空间的用户的pmv进行监视来控制空气调节机的空气调节控制系统(例如参照专利文献1)。
3.在专利文献1所公开的空气调节控制系统中,在进行向请求者输送局部气流的局部空气调节时,以使与请求者相距规定的距离的相邻者的pmv维持规定的范围、且请求者的pmv成为规定的范围的方式进行局部空气调节。在专利文献1所公开的空气调节控制系统中,如果相邻者的pmv脱离规定的范围,则减弱局部空气调节。
4.专利文献1:国际公开第2008/087959号
技术实现要素:
5.发明要解决的问题
6.在专利文献1所公开的空气调节控制系统中,如果相邻者的pmv脱离规定的范围,则与请求者相比使相邻者的舒适性优先来进行减弱局部空气调节的控制。在该情况下,由于局部空气调节减弱,直到请求者的pmv进入规定的范围为止需要时间。在此期间,请求者不得不在不舒服的状态下忍耐。专利文献1所公开的空气调节控制系统在空气调节对象空间中存在多个用户的情况下,如果想要提高一部分用户的舒适性,则会损害其余用户的舒适性。
7.本公开是为了解决如上所述的问题而完成的,提供谋求提高处于空气调节对象空间的多个用户的舒适性的空气调节系统和空气调节装置的控制方法。
8.用于解决问题的方案
9.本公开所涉及的空气调节系统具有:空气调节装置,对空气调节对象空间进行空气调节;人检测单元,针对处于所述空气调节对象空间的多个用户,检测各用户的活动量和所述空气调节对象空间中的各用户的位置;存储装置,按多个活动量的每个活动量存储包含与所述空气调节装置的多个空气调节控制模式分别对应的表示所述空气调节对象空间中的用户的舒适度的舒适性指标的分布即舒适性指标分布的组;以及控制装置,针对所述各用户,确定与由所述人检测单元检测出的活动量对应的所述组,从确定出的组内的多个所述舒适性指标分布提取与由所述人检测单元检测的位置对应的多个所述舒适性指标,使用与所述各用户的位置对应地提取出的所述多个舒适性指标,按所述多个空气调节控制模式的每个空气调节控制模式计算表示所述多个用户的综合性舒适度的舒适效率,求出所述
多个空气调节控制模式中的使计算出的所述舒适效率最大的空气调节控制模式。
10.本公开所涉及的空气调节装置的控制方法是由与人检测单元及存储装置分别连接的控制装置进行的空气调节装置的控制方法,该人检测单元针对处于空气调节对象空间的多个用户检测各用户的活动量和所述空气调节对象空间中的所述各用户的位置,所述控制方法具有以下步骤:按多个活动量的每个活动量存储包含与所述空气调节装置的多个空气调节控制模式分别对应的表示所述空气调节对象空间中的用户的舒适度的舒适性指标的分布即舒适性指标分布的组;针对所述各用户,确定与由所述人检测单元检测出的活动量对应的所述组;针对所述各用户,从确定出的组内的多个所述舒适性指标分布提取与由所述人检测单元检测的位置对应的多个所述舒适性指标;使用与所述各用户的位置对应地提取出的所述多个舒适性指标,针对所述多个空气调节控制模式的每个空气调节控制模式计算表示所述多个用户的综合性舒适度的舒适效率;以及求出所述多个空气调节控制模式中的使计算出的所述舒适效率最大的空气调节控制模式。
11.发明的效果
12.根据本公开,与处于空气调节对象空间的各用户的活动量对应地求出包含与多个空气调节控制模式分别对应的空气调节对象空间中的舒适性指标分布的组。另外,与处于空气调节对象空间的各用户的位置对应地从组内的多个舒适性指标分布提取多个舒适性指标。然后,基于各用户的多个舒适性指标,从多个空气调节控制模式求出使多个用户的舒适效率最大的空气调节控制模式。通过由空气调节装置按照使多个用户的舒适效率最大的空气调节控制模式进行空气调节,能够谋求对多个用户提高舒适性。
附图说明
13.图1是表示实施方式1所涉及的空气调节系统的一个结构例的图。
14.图2是表示图1所示的空气调节装置的一个结构例的制冷剂回路图。
15.图3是表示图2所示的负载侧单元的一个结构例的侧面示意图。
16.图4是表示图3所示的第一挡板的角度与空气的吹出方向的关系的示意图。
17.图5是表示图3所示的第二挡板的角度与空气的吹出方向的关系的示意图。
18.图6是表示由图2所示的红外线传感器检测的温度分布的垂直方向的范围的一例的图。
19.图7是表示由图2所示的红外线传感器检测的温度分布的水平方向的范围的一例的图。
20.图8是表示在将由图2所示的红外线传感器检测出的温度分布显示为二维图像的情况下的一例的形象图(image diagram)。
21.图9是表示图2所示的控制装置的一个结构例的功能框图。
22.图10是表示图9所示的控制装置的一个结构例的硬件结构图。
23.图11是表示图9所示的控制装置的其它结构例的硬件结构图。
24.图12是表示图1所示的信息处理装置的控制装置的一个结构例的功能框图。
25.图13是表示描述了活动的种类与代表活动量的能量代谢率的组合的例子的表。
26.图14是表示图12所示的运算装置的一个结构例的硬件结构图。
27.图15是表示由图1所示的空气调节装置进行空气调节的空气调节对象空间的一例
的布局图。
28.图16是表示各用户的活动量和位置的一例的表。
29.图17是表示实施方式1所涉及的信息处理装置的动作过程的示意图。
30.图18是表示实施方式1所涉及的信息处理装置的动作过程的流程图。
31.图19是表示舒适效率的计算结果的一例的表。
32.图20是表示在步骤s107中决定的空气调节控制模式的情况下的ipmv分布的一例的形象图。
33.图21是表示在步骤s107中决定的空气调节控制模式的情况下的ipmv分布的其它例的形象图。
34.图22是表示变形例1的空气调节系统的一个结构例的图。
35.(附图标记说明)
36.1、1a:空气调节系统;2:信息处理装置;4:第一挡板;4a~4d:叶片;5:第二挡板;5a:前方叶片;5b:后方叶片;6:吹出口;10:空气调节装置;11:数据获取单元;12:模型生成单元;13:活动量判定单元;14:位置判定单元;15:效率计算单元;16:控制决定单元;20:人检测单元;21:存储装置;22:控制装置;30:人检测单元;31:位置检测单元;32:活动量检测单元;40:可穿戴终端;50网络;60:接入点;70:天花板;80:处理电路;81:处理器;82:存储器;83:总线;91:处理器;92:存储器;93:总线;102:制冷剂回路;103:负载侧单元;104:热源侧单元;105:风向调整部;110:制冷剂配管;113:送风机;114:送风机;115:负载侧热交换器;116:热源侧热交换器;117:膨胀阀;118:四通阀;119:压缩机;120:环境检测部;121:室温传感器;122:湿度传感器;123:温度传感器;130:控制装置;131:冷冻循环控制单元;132:通信单元;140:红外线传感器;fl:地面。
具体实施方式
37.关于本公开的实施方式,使用图来详细地进行说明。本实施方式中说明的各种具体的设定例是一例,不限定于所记载的设定例。另外,在本公开的实施方式中,通信是指无线通信和有线通信中的某一方或两方。在本实施方式中,通信也可以是无线通信和有线通信混合存在的通信方式。关于通信方式,例如也可以在某区间进行无线通信,在其它空间进行有线通信。另外,也可以从某装置向其它装置的通信以有线通信的方式进行,从其它装置向某装置的通信以无线通信的方式进行。
38.实施方式1.
39.说明本实施方式1的空气调节系统1的结构。图1是表示实施方式1所涉及的空气调节系统的一个结构例的图。如图1所示,空气调节系统具有:空气调节装置10,对作为空气调节对象空间的室内的空气进行调节;人检测单元30,检测处于室内的用户的活动量和位置;以及信息处理装置2,与空气调节装置10及人检测单元30进行通信连接。空气调节装置10和人检测单元30经由网络50来与信息处理装置2进行通信连接。网络50例如是互联网。
40.人检测单元30具有:活动量检测单元32,检测处于室内的用户的活动量;以及位置检测单元31,检测室内的用户的位置。
41.说明图1所示的空气调节装置10的结构。图2是表示图1所示的空气调节装置的一个结构例的制冷剂回路图。空气调节装置10具有:热源侧单元104,生成热源;以及负载侧单
元103,使用由热源侧单元104生成的热源来对室内的空气进行调整。热源侧单元104具有压缩机119、热源侧热交换器116、膨胀阀117、送风机114以及四通阀118。负载侧单元103具有负载侧热交换器115、送风机113、风向调整部105以及控制装置130。
42.风向调整部105具有对从负载侧单元103吹出的空气的吹出方向进行调整的第一挡板4和第二挡板5。在负载侧单元103中设置有环境检测部120。环境检测部120具有:室温传感器121,检测室内的空气的温度;湿度传感器122,检测室内的空气的湿度;以及温度传感器123,检测从负载侧单元103向室内吹出的空气的温度tb。另外,在负载侧单元103中设置有检测室内的空间的温度分布的红外线传感器140。红外线传感器140作为图1所示的人检测单元30发挥功能。
43.通过制冷剂配管110将压缩机119、热源侧热交换器116、膨胀阀117以及负载侧热交换器115连接,来构成供制冷剂循环的制冷剂回路102。压缩机119、膨胀阀117、送风机114、四通阀118以及风向调整部105与控制装置130进行通信连接。环境检测部120及红外线传感器140与控制装置130进行通信连接。
44.压缩机119将吸入的制冷剂进行压缩后喷出。压缩机119例如是能够变更容量的变频式压缩机。四通阀118变更在制冷剂回路102中流通的制冷剂的流通方向。膨胀阀117将制冷剂进行减压来使其膨胀。膨胀阀117例如是电子膨胀阀。热源侧热交换器116是使制冷剂与外部空气进行热交换的热交换器。负载侧热交换器115是使制冷剂与室内的空气进行热交换的热交换器。热源侧热交换器116和负载侧热交换器115例如是翅片管式热交换器。
45.制冷剂一边反复进行压缩和膨胀一边在制冷剂回路102中循环,由此形成热泵。负载侧单元103通过进行制冷、制热、除湿、加湿、保湿以及送风等运转来对室内的空气进行调整。在图2中示出了控制装置130设置于负载侧单元103的情况,但是控制装置130的设置位置不限定于负载侧单元103。控制装置130也可以设置于热源侧单元104,也可以设置于除了负载侧单元103和热源侧单元104这两方以外的位置。另外,在空气调节装置10中也可以设置有检测凝结温度和蒸发温度的温度传感器(未图示)。
46.图3是表示图2所示的负载侧单元的一个结构例的侧面示意图。负载侧单元103被嵌入于天花板70。当送风机113旋转时,在负载侧单元103中,形成空气沿虚线箭头所示的方向流通的气流,空气经由吹出口6被吹出到室内。在吹出口6设置有第一挡板4和第二挡板5。第二挡板5具有前方叶片5a和后方叶片5b。
47.图4是表示图3所示的第一挡板的角度与空气的吹出方向的关系的示意图。如图4所示,第一挡板4具有叶片4a~4d。在图4中,为了便于说明,示出了在从上方俯视负载侧单元103时被透视的叶片4a~4d。将第一挡板4的叶片4a~4d的角度表示为θh,将负载侧单元103的正面方向(x轴箭头的相反方向)设为水平基准θh0=0
°
。在图4中,用虚线的箭头表示水平方向的角度θh1时的空气的吹出方向ad1,用实线的箭头表示水平方向的角度θh2时的空气的吹出方向ad2。
48.图5是表示图3所示的第二挡板的角度与空气的吹出方向的关系的示意图。在图5中,为了便于说明,将图3所示的第二挡板5中的前方叶片5a放大示出,省略示出后方叶片5b。将负载侧单元103的下方向(z轴箭头的相反方向)设为垂直基准vax,将前方叶片5a的角度表示为θv。在图5中,用实线的箭头表示垂直方向的角度θv1时的空气的吹出方向ad3,用虚线的箭头表示垂直方向的角度θv2时的空气的吹出方向ad4。
49.此外,在本实施方式1中,以负载侧单元103为天花板嵌入类型的情况来进行了说明,但是不限于天花板嵌入类型,也可以是安装于天花板的室内侧的面的类型、或安装于墙壁的类型等其它类型。另外,图3所示的负载侧单元103的结构是一例,不限于图3所示的结构。负载侧热交换器115和送风机113的配置不限定于图3所示的结构。
50.另外,对从负载侧单元103吹出的空气的吹出方向进行调整的结构不限于参照图3~图5来说明的风向调整部105。风向调整部105是具有对水平方向的角度进行调整的第一挡板4和对垂直方向的角度进行调整的第二挡板5这两种叶片的结构,但是也可以是设置有在将水平方向和垂直方向相组合的方向中的任意方向上都能够调整角度的一种叶片的结构。并且,作为对从负载侧单元103吹出的空气的吹出方向进行调整的手段,不限于如风向调整部105那样的手段,也可以是变更吹出口本身的方向的手段。例如考虑变更吹出口的垂直方向和水平方向各自的角度的手段。
51.图6是表示由图2所示的红外线传感器检测的温度分布的垂直方向的范围的一例的图。与图5同样地,将以垂直基准vax为基准的垂直方向的角度设为θv。图7是表示由图2所示的红外线传感器检测的温度分布的水平方向的范围的一例的图。与图4同样地,将以水平基准θh0为基准的水平方向的角度设为θh。如图6和图7所示,红外线传感器140测定相对于负载侧单元103所相向的墙壁的方向(y轴箭头的相反方向)而言的垂直方向的角度θv的固定的范围和水平方向的角度θh的固定的范围中的室内的温度分布。
52.图8是表示将由图2所示的红外线传感器检测出的温度分布显示为二维图像的情况下的一例的形象图。为了便于说明,在图8中,用虚线表示墙壁、地板以及天花板各自与其它部分之间的交界。一般来说,墙壁、地板以及天花板的各材料的热的传导率不同,因此在表示温度分布的二维图像中,墙壁、地板以及天花板的温度互不相同,能够检测各边界。
53.在图8所示的图像img中,示出了花纹的密度越高则温度越高。温暖的空气相比于地面fl更倾向于滞留在靠近天花板的一侧,因此与地面fl相比天花板侧的花纹的密度高。地面fl的温度低,因此未显示花纹。参照图8所示的图像img可知,在室内有人的情况下,由于人体的表面温度与地面fl及墙壁的温度不同,因此能够检测人体的位置。图8的图像img表示检测出用户ma和用户mb的各用户在室内的位置的情况。另外,通过将表示用户ma及用户mb的表面温度的花纹的密度进行比较,能够推测各用户的活动量。在图8所示的图像img中,用户mb的花纹的密度大于用户ma的花纹的密度,因此能够推测为用户mb的活动量大于用户ma的活动量。
54.图9是表示图2所示的控制装置的一个结构例的功能框图。控制装置130例如是微型计算机。控制装置130具有冷冻循环控制单元131和通信单元132。通过由微型计算机等运算装置执行软件来实现控制装置130的各种功能。另外,控制装置130也可以由实现各种功能的电路器件等硬件构成。
55.冷冻循环控制单元131与负载侧单元103的制冷、制热、除湿、加湿、保湿以及送风等运转对应地控制四通阀118。冷冻循环控制单元131基于室温及设定温度以及湿度及设定湿度控制制冷剂回路102的冷冻循环。例如,冷冻循环控制单元131控制压缩机119的运转频率、膨胀阀117的开度以及送风机113及114的转速,使得室温与设定温度在固定的范围中一致且室内的湿度与设定湿度在固定的范围中一致。关于由送风机113生成的气流的风速w,例如能够以大、中以及小这3个等级来进行选择。关于设定温度和设定湿度,由用户借助未
在图中示出的远程控制器对控制装置130进行设定。
56.另外,冷冻循环控制单元131将包括由室温传感器121检测的室温和由湿度传感器122检测的湿度的环境信息发送到通信单元132。冷冻循环控制单元131将包括压缩机119的频率、凝结温度、蒸发温度以及膨胀阀117的开度的运转信息发送到通信单元132。运转信息也可以包括气流信息,该气流信息包含由温度传感器123检测的温度tb、第一挡板4的水平方向的角度θh、第二挡板5的垂直方向的角度θv以及风速w。
57.并且,冷冻循环控制单元131对由红外线传感器140检测的温度分布的二维图像进行分析,向通信单元132发送将表示室内的用户的位置的位置信息与用户的表面温度的数据即温度数据设为组的用户信息。位置信息是表示以负载侧单元103为基准由水平方向的角度θh和垂直方向的角度θv表示的位置的信息。在室内有多个用户的情况下,冷冻循环控制单元131将多个用户信息发送到通信单元132。冷冻循环控制单元131也可以将由红外线传感器140检测的温度分布的二维图像的数据发送到通信单元132以代替发送多个用户信息。
58.并且,冷冻循环控制单元131在从通信单元132接收到空气调节控制模式的信息时,按照空气调节控制模式控制风向调整部105和送风机113。具体地说,冷冻循环控制单元131与空气调节控制模式对应地对吹出温度、风速以及风向进行调整。
59.空气调节控制模式例如是作为温度传感器123的检测值的温度tb、第一挡板4的水平方向的角度θh、第二挡板5的垂直方向的角度θv以及从负载侧单元103吹出的空气的风速w这四个控制参数的组合。多个空气调节控制模式是以这四个控制参数中的至少一个控制参数互不相同的方式组合而成的模式。稍后说明多个空气调节控制模式的具体例。
60.通信单元132将从冷冻循环控制单元131接收的环境信息、运转信息以及用户信息发送到信息处理装置2。通信单元132在从冷冻循环控制单元131接收到表示温度分布的二维图像的数据时,将二维图像的数据发送到信息处理装置2。通信单元132在从信息处理装置2接收到空气调节控制模式的信息时,将接收到的空气调节控制模式的信息发送到冷冻循环控制单元131。通信单元132例如按照tcp/ip(transmission control protocol/internet protocol:传输控制协议/互联网协议)在与信息处理装置2之间发送接收信息。
61.在此,说明图9所示的控制装置130的硬件的一例。图10是表示图9所示的控制装置的一个结构例的硬件结构图。在通过硬件来执行控制装置130的各种功能的情况下,图9所示的控制装置130如图10所示那样由处理电路80构成。通过处理电路80来实现图9所示的冷冻循环控制单元131和通信单元132的各功能。
62.在通过硬件来执行各功能的情况下,处理电路80例如相当于单一电路、复合电路、被编程的处理器、被并行编程的处理器、asic(application specific integrated circuit:专用集成电路)、fpga(field-programmable gate array:现场可编程门阵列)或将它们组合而成的电路。也可以通过处理电路80来分别实现冷冻循环控制单元131和通信单元132的各单元的功能。另外,也可以通过一个处理电路80来实现冷冻循环控制单元131和通信单元132的各单元的功能。
63.另外,说明图9所示的控制装置130的其它硬件的一例。图11是表示图9所示的控制装置的其它结构例的硬件结构图。在通过软件来执行控制装置130的各种功能的情况下,图9所示的控制装置130如图11所示那样由处理器81和存储器82构成。通过处理器81和存储器
82来实现冷冻循环控制单元131和通信单元132的各功能。图11示出了处理器81和存储器82彼此经由总线83以能够通信的方式连接。
64.在通过软件来执行各功能的情况下,通过软件、固件或软件与固件的组合来实现冷冻循环控制单元131和通信单元132的功能。软件和固件被描述为程序并被保存在存储器82中。处理器81通过读出并执行被存储在存储器82中的程序来实现各单元的功能。
65.作为存储器82,例如使用rom(read only memory:只读存储器)、闪存、eprom(erasable and programmable rom:可擦除可编程rom)以及eeprom(electrically erasable and programmable rom:电擦除可编程rom)等非易失性的半导体存储器。另外,作为存储器82,也可以使用ram(random access memory:随机存取存储器)的易失性的半导体存储器。并且,作为存储器82,也可以使用磁盘、软盘、光盘、cd(compact disc:压缩盘)、md(mini disc:迷你盘)以及dvd(digital versatile disc:数字通用盘)等可装卸的记录介质。
66.接着,在说明图1所示的信息处理装置2的结构之前,说明信息处理装置2在决定空气调节装置10的空气调节控制模式时使用的舒适性指标。首先,说明作为舒适性指标的一种的pmv。
67.对于人来说,作业时的疲劳和作业的容易度的感觉由围绕人的温热环境、视觉环境以及声音环境等物理性环境因素构成。温热环境例如是温度、湿度、气流以及辐射。视觉环境例如是照度。声音环境例如是声压。作为这些环境因素的组合的复合环境对在该环境中工作的人的作业的适应感和人的疲劳感产生影响。
68.pmv是作为用数值来评价温热环境中的人的舒适度和冷热感的指标由丹麦工科大学范格(fanger)教授提倡的值。pmv在1984年作为iso-7730被国际标准化。pmv将人体的热负荷与人的冷热感相联系起来。具体地说,pmv通过如下方式来计算:根据空气环境侧的要素和人体侧的要素建立与人体有关的热平衡式,对该热平衡式代入人感到舒适时的皮肤温度与因出汗产生的散热量的式。空气环境侧的要素不仅是空气温度,也是放射温度、辐射温度、湿度以及气流等要素。人体侧的要素是人的活动量、穿衣量以及平均皮肤温度等要素。
69.活动量是人的生物体信息的一例,用met(metabolic equivalent:代谢当量)这样的表示运动强度的单位来表示。使用met来将各种运动进行了数值化。例如,人在安静地坐着观赏电视时的运动强度被定义为1met。
70.在本实施方式1中,以舒适性指标是个人的舒适性指标即ipmv(individual pmv)的情况来进行说明。ipmv值是基于pmv的值,但不是空气调节对象空间的整体的冷热感的平均值,而是确定人所处的位置并表示确定出的位置的冷热感即局部冷热感的值。局部冷热感还有时被称为局部舒适度。
71.[数学式1]
[0072]
ipmv=(0.303e-0.036m
+0.028)
×
(m-w-ed-es-ere-cre-r-c)
…
(1)
[0073]
说明式(1)中的8个变量。m是代谢量[w/m2],w是机械功量[w/m2]。ed是不感蒸泄量[w/m2],es是从皮肤表面的汗蒸发热损失量[w/m2]。ere是因呼吸产生的潜热损失量[w/m2],cre是因呼吸产生的显热损失量[w/m2]。r是放射热损失量[w/m2],c是对流热损失量[w/m2]。
[0074]
如式(1)所示,ipmv根据温度、湿度以及放射温度等而用数值来表示人的冷热感。ipmv的范围是-3~+3。将ipmv=0时设为中立。在ipmv=0时被定义为舒适。ipmv=3时被定
义为热,ipmv值=2时被定义为暖和,ipmv=1时被定义为稍微暖和。ipmv=-3时被定义为冷,ipmv=-2时被定义为凉,ipmv=-1时被定义为稍微凉。也就是说,定义为ipmv越接近0则人的舒适性越提高。
[0075]
接着,说明图1所示的信息处理装置2的结构。图12是表示图1所示的信息处理装置的控制装置的一个结构例的功能框图。信息处理装置2具有:存储装置21,存储ipmv数据库;以及控制装置22,基于处于室内的多个用户的活动量、位置以及舒适性指标求出最佳的空气调节控制模式并提供给空气调节装置10。存储装置21例如是hdd(hard disk drive:硬盘驱动器)。控制装置22例如是微型计算机。通过由微型计算机等运算电路执行软件来实现控制装置22的各种功能。在该软件中写入有稍后说明的流程图(图18)所示的过程。
[0076]
控制装置22具有数据获取单元11、模型生成单元12、活动量判定单元13、位置判定单元14、效率计算单元15以及控制决定单元16。存储装置21存储有用于生成ipmv数据库的标准的流体三维模型。存储装置21存储由模型生成单元12生成的ipmv数据库。ipmv数据库是按多个活动量的每个活动量设置有包含与空气调节装置10的多个空气调节控制模式分别对应的室内的用户的舒适性指标的分布即舒适性指标分布的组的结构。
[0077]
数据获取单元11使以固定的周期从空气调节装置10接收的环境信息、运转信息以及用户信息存储到存储装置21。数据获取单元11使以固定的周期从空气调节装置10接收的信息按时间序列存储到存储装置21,监视空气调节装置10的动作状态。模型生成单元12从存储装置21读出环境信息和运转信息,使读出的信息反映到标准的流体三维模型来生成ipmv数据库。活动量判定单元13参照ipmv数据库,针对各用户确定与由红外线传感器140检测出的活动量对应的组。
[0078]
位置判定单元14针对各用户,从由活动量判定单元13确定出的组内的多个舒适性指标分布提取与由红外线传感器140检测的位置对应的多个舒适性指标。效率计算单元15使用与各用户的位置对应地提取出的多个舒适性指标,针对多个空气调节控制模式的每个空气调节控制模式计算表示多个用户的综合性舒适度的舒适效率ζ。控制决定单元16求出多个空气调节控制模式中的使计算出的舒适效率ζ最大的空气调节控制模式。控制决定单元16将求出的空气调节控制模式发送到空气调节装置10。
[0079]
控制装置22将以使得用户所处的位置的ipmv接近中立的方式变更风向和风量等的空气调节控制模式发送到空气调节装置10。控制装置22不是想要将室内的整个区域中的pmv设为中立,而是以使得用户所处的位置的ipmv接近中立的方式决定空气调节控制模式,不将用户不在的位置的ipmv包括在空气调节控制模式的决定要素中。详细说明图12所示的控制装置22的各单元中的模型生成单元12和效率计算单元15的结构。
[0080]
说明图12所示的模型生成单元12的结构。式(1)中的8个变量的值能够根据室温、风速、辐射温度及湿度以及用户的穿衣量及活动量这6个值导出。在ipmv中,室温、风速、辐射温度是与用户的位置对应的值。因此,在此,将室温设为局部温度,将风速设为局部风速,将辐射温度设为局部辐射温度。以下,说明模型生成单元12求出这6个值的方法。
[0081]
作为局部温度,模型生成单元12使用作为数值流体分析的一例的cfd(computational fluid dynamics:计算流体动力学),与空气调节控制模式对应地对空气调节对象空间的温度分布进行仿真,根据温度分布来估计特定的位置的温度。湿度是由湿度传感器122检测的。模型生成单元12从被存储在存储装置21中的运转信息获取湿度的信
息。作为局部风速,模型生成单元12在基于cfd的分析结果中根据空气调节对象空间的整体的空气的风速来估计特定的位置的风速。设想局部辐射温度与室温相等。因此,模型生成单元12从被存储在存储装置21中的运转信息获取室温传感器121的检测值。
[0082]
作为穿衣量,模型生成单元12使用从空气调节装置10接收到的二维图像的数据来估计表示衣服的热阻的clo值。具体地说,模型生成单元12根据二维图像的数据针对检测出的每个用户估计皮肤温度、肌肤的裸露量以及穿的衣服的表面温度。然后,模型生成单元12参照将皮肤温度、肌肤的裸露量以及穿的衣服的表面温度与clo值相对应而成的克洛值(clo value)表,获取各用户的clo值。存储装置21存储有克洛值表。作为活动量,模型生成单元12根据从空气调节装置10接收到的二维图像的数据来估计各用户的met。例如,存储装置21预先存储有将二维图像的数据的红外线检测值与met相对应而成的met表。模型生成单元12参照met表,读出与各用户的红外线检测值对应的met。
[0083]
模型生成单元12使用cfd作为数值流体分析,与多个空气调节控制模式对应地针对空气调节对象空间生成与人的位置无关的按活动量的ipmv数据库并存储到存储装置21。
[0084]
图13是表示描述了活动的种类与代表活动量的能量代谢率的组合的例子的表。通过式(2)计算能量代谢率。参照图13,例如,睡着的人的活动量是0.7met,安静地坐着的人的活动量是1met。
[0085]
[数学式2]
[0086][0087]
说明由模型生成单元12进行的cfd的计算处理的一例。首先,模型生成单元12使用标准的流体三维模型将作为仿真的对象的空气调节对象空间进行三维模型化。接着,模型生成单元12将模型化的空气调节对象空间例如划分为格子状。然后,模型生成单元12针对格子间的各矩形区域,对与流体的压力、温度、速度、存在于空间的发热体以及来自墙壁的侵入热对应的热计算的结果赋予必要初始条件作为边界条件。并且,模型生成单元12使用所决定的湍流模型和差分格式(difference scheme),基于来自墙壁的侵入热和内部发热等边界条件对各矩形区域中的压力、风量以及温度等进行分析。
[0088]
在本实施方式1中,ipmv是与多个空气调节控制模式的各空气调节控制模式对应地计算的。多个空气调节控制模式例如存在由与第一挡板4的角度θh有关的3个模式、与第二挡板5的角度θv有关的3个模式、与风速w有关的3个模式以及与温度tb有关的3个模式的组合形成的81种。也就是说,本实施方式1是空气调节控制模式存在3
×3×3×
3=81种的情况。
[0089]
第一挡板4的水平方向的角度θh是向左(图4的x轴箭头方向)30
°
、0
°
以及向右(图4的x轴箭头的相反方向)30
°
这3个模式。第二挡板5的垂直方向的角度θv是θv=20
°
、45
°
以及60
°
这3个模式。风速w是大、中以及小这3个模式。从负载侧单元103吹出的空气的温度tb是高、中以及低这3个模式。
[0090]
模型生成单元12与空气调节对象空间的位置无关地,针对空气调节对象空间整体,针对1met和2met等活动量的每一个,对81种空气调节控制模式进行cfd分析,来生成空气调节对象空间中的ipmv的分布即ipmv分布。ipmv分布是通过cfd分析将空气调节对象空间分割为多个矩形区域并与各矩形区域对应地将ipmv存储到存储装置21而成的。例如,模
型生成单元12针对1met的活动量生成81种ipmv分布来设为一个组,针对2met的活动量生成81种ipmv分布来设为其它组。通过这样,模型生成单元12生成与多个活动量分别对应的组,将多个组作为ipmv数据库存储到存储装置21。在本实施方式1中,说明使活动量按1met、2met等的间隔发生变化的情况,但是活动量的间隔不限于1.0的情况。活动量的间隔也可以是0.1或0.5。
[0091]
效率计算单元15使用处于室内的用户的位置和活动量的信息,使用式(3)来计算多个空气调节控制模式各自的舒适效率ζ。
[0092]
[数学式3]
[0093]
ζ=(1-2|ipmv1|)
×
(1-2|ipmv2|)
×…×
(1-2|ipmvk|)
×
100%
…
(3)
[0094]
在式(3)中,k是按每个用户不同的识别编号,k是处于室内的用户的人数。在本实施方式1中,k≥2。目标值是将个人的舒适性指标ipmv设为
±
0.5以内,从而在|ipmvk|》0.5时设为|ipmvk|为0.5。
[0095]
舒适效率ζ是评价多个用户的冷热感与中立(个人ipmv=0)有多接近的值。舒适效率ζ是表示处于室内的多个用户的综合性舒适度的值。认为舒适效率ζ越高(最大100%)则越能够满足处于室内的多个用户的舒适性。即,舒适效率ζ=100%意味着多个用户舒适,舒适效率ζ=0%意味着多个用户不舒服。控制决定单元16求出使舒适效率ζ为与81种空气调节控制模式对应的舒适效率ζ中最大的空气调节控制模式。
[0096]
说明图12所示的控制装置22的硬件的一例。图14是表示图12所示的运算装置的一个结构例的硬件结构图。在通过软件来执行控制装置22的各种功能的情况下,图12所示的控制装置22如图14所示那样由cpu(central processing unit:中央处理单元)等处理器91和存储器92构成。通过处理器91和存储器92来实现数据获取单元11、模型生成单元12、活动量判定单元13、位置判定单元14、效率计算单元15以及控制决定单元16的各功能。图14示出了处理器91与存储器92经由总线93以能够相互通信的方式连接。处理器91和存储器92经由总线93来与图12所示的存储装置21连接。存储器92起到主存储装置的作用,存储装置21起到辅助存储装置的作用。
[0097]
在通过软件来执行各功能的情况下,通过软件、固件或软件与固件的组合来实现数据获取单元11、模型生成单元12、活动量判定单元13、位置判定单元14、效率计算单元15以及控制决定单元16的功能。软件和固件被描述为程序并被保存在存储器92中。处理器91通过读出并执行被存储在存储器92中的程序来实现各单元的功能。存储器92例如是与存储器82同样的结构,省略其详细的说明。
[0098]
此外,模型生成单元12也可以通过神经网络预先学习ipmv的计算方法,根据建筑物负荷、地区以及用户的喜好等输入条件估计空气调节对象空间的ipmv。
[0099]
另外,从负载侧单元103吹出的空气的温度tb根据建筑物的负荷和压缩机119的运转频率而线性地变化。因此,模型生成单元12也可以根据建筑物负荷、地区以及用户的喜好等输入条件学习从负载侧单元103吹出的空气的温度tb、角度θh及θv以及风速w的最佳的组合,通过神经网络来缩减选择对象的空气调节控制模式的数量。在该情况下,控制决定单元16从缩减后的数量的空气调节控制模式中选择最佳的空气调节控制模式,因此顺畅地进行空气调节控制模式的决定处理。用户的喜好例如是用户的冷热感的倾向。
[0100]
具体地说,存储装置21按时间序列存储包括设置有空气调节装置10的建筑物的热
负荷的输入条件与使舒适效率ζ最大的空气调节控制模式的组合即组合数据。然后,控制决定单元16基于按时间序列存储的多个组合数据,缩减多个空气调节控制模式中的要选择的空气调节控制模式的数量。在该情况下,输入条件也可以除了包括建筑物的热负荷以外,还包括设置有空气调节装置10的地区及地区的气象数据、建筑物的日照量以及表示多个用户的冷热感的倾向的信息。
[0101]
另外,模型生成单元12也可以如下更新ipmv数据库的ipmv分布。模型生成单元12根据包括压缩机119的频率、凝结温度、蒸发温度以及膨胀阀117的开度的运转信息估计空气调节装置10的冷冻能力。然后,模型生成单元12使估计出的冷冻能力以及根据温度tb、水平方向的角度θh、垂直方向的角度θv以及风速w估计的气流状态反映到按多个活动量的每个活动量存储的多个组的各ipmv分布。在该情况下,与空气调节装置10的运转状态的变化相应地ipmv数据库被更新为最新的状态。
[0102]
接着,说明本实施方式1的信息处理装置2的控制方法。图15是表示由图1所示的空气调节装置进行空气调节的空气调节对象空间的一例的布局图。图15表示置于室内的家具的位置和处于室内的2名用户的位置。在此,说明如图15所示那样用户ma和用户mb这2人处于室内的情况。图15的纵轴是y轴坐标,横轴是x轴坐标。图16是表示各用户的活动量和位置的一例的表。用户ma的活动量是1met,用户mb的活动量是2met。
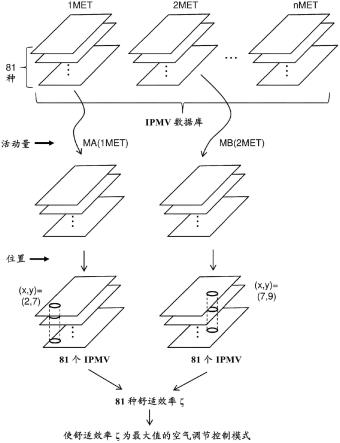
[0103]
图17是表示实施方式1所涉及的信息处理装置的动作过程的示意图。nmet的n是2以上的正整数。图18是表示实施方式1所涉及的信息处理装置的动作过程的流程图。在步骤s101中,数据获取单元11从空气调节装置10获取环境信息。数据获取单元11使获取到的环境信息存储到存储装置21。
[0104]
在步骤s102中,数据获取单元11从空气调节装置10获取运转信息。数据获取单元11使获取到的运转信息存储到存储装置21。运转信息包括压缩机119的频率、凝结温度、蒸发温度以及膨胀阀117的开度。另外,运转信息包括气流信息,该气流信息包含由温度传感器123检测的温度tb、第一挡板4的水平方向的角度θh、第二挡板5的垂直方向的角度θv以及风速w。
[0105]
在步骤s101或s102中,数据获取单元11从空气调节装置10获取作为用户信息的由红外线传感器140检测出的二维图像的数据并存储到存储装置21。模型生成单元12使用存储装置21所存储的信息来生成ipmv数据库。模型生成单元12使所生成的ipmv数据库存储到存储装置21。在图17中示出按每个活动量设置有81种ipmv分布的ipmv数据库。
[0106]
在步骤s103中,活动量判定单元13参照存储装置21所存储的二维图像的数据,来获取各用户的活动量的信息。在此,活动量判定单元13将用户ma的活动量估计为1met,将用户mb的活动量估计为2met。
[0107]
在步骤s104中,位置判定单元14参照存储装置21所存储的二维图像的数据,来获取各用户的位置的信息。在此,位置判定单元14将用户ma的位置判定为坐标(2,7),将用户mb的位置判定为坐标(7,9)。
[0108]
在步骤s105中,效率计算单元15根据活动量判定单元13的估计结果,从ipmv数据库读出1met的组和2met的组。接着,效率计算单元15根据位置判定单元14的判定结果,读出位于1met的组的坐标(2,7)的81个ipmv。另外,效率计算单元15根据位置判定单元14的判定结果,读出位于2met的组的坐标(7,9)的81个ipmv。此时,效率计算单元15在各ipmv分布中
读出空气调节对象空间的预先决定的高度(例如地板上1.3m)处的ipmv。然后,效率计算单元15将用户ma的81个ipmv和用户mb的81个ipmv代入式(3)来计算81种舒适效率ζ(步骤s106)。
[0109]
在步骤s107中,控制决定单元16决定81种空气调节控制模式中的使舒适效率ζ最大的空气调节控制模式。此时,作为空气调节控制模式的选择条件,也可以不仅包括使舒适效率ζ最大这样的条件,还包括各用户的ipmv在
±
0.5以内这样的条件。
[0110]
在步骤s108中,控制决定单元16将在步骤s107中决定的空气调节控制模式的信息发送到空气调节装置10。空气调节装置10的控制装置130在从信息处理装置2接收到空气调节控制模式的信息时,按照空气调节控制模式来控制压缩机119、送风机113以及风向调整部105中的至少任一个。例如,在变更来自负载侧单元103的空气的吹出温度的情况下,冷冻循环控制单元131变更压缩机119的运转频率。在变更风速w的情况下,冷冻循环控制单元131变更送风机113的转速。在变更角度θh的情况下,冷冻循环控制单元131变更第一挡板4的角度θh。在变更角度θv的情况下,冷冻循环控制单元131变更第二挡板5的角度θv。
[0111]
在步骤s109中,数据获取单元11判定是否经过了固定时间。在未经过固定时间的情况下,控制装置22成为待机状态。在步骤s109的判定的结果是经过了固定时间的情况下,控制装置22返回到步骤s101的处理。
[0112]
图19是表示舒适效率的计算结果的一例的表。在图19中,与各空气调节控制模式对应地示出了活动量为1met的情况下的ipmv、活动量为2met的情况下的ipmv以及舒适效率ζ。图19所示的表的左栏的编号是空气调节控制模式的识别编号。参照图19所示的表可知,使舒适效率ζ最大的空气调节控制模式是第16号空气调节控制模式。
[0113]
图20是表示在步骤s107中决定的空气调节控制模式的情况下的ipmv分布的一例的形象图。图20是在第16号空气调节控制模式中活动量为1met的情况下的ipmv分布。图21是表示在步骤s107中决定的空气调节控制模式的情况下的ipmv分布的其它例的形象图。图21是在第16号空气调节控制模式中活动量为2met的情况下的ipmv分布。
[0114]
如图20和图21所示,在编号16的空气调节控制模式中,将活动量为1met的用户ma的ipmv和活动量为2met的用户mb的ipmv进行可视化。图20和图21示出花纹的密度越高则ipmv越是比中立更靠负侧的值,花纹的密度越小则ipmv越是比中立更靠负侧的值。在图20中,用户ma的位置的ipmv为接近0的值。在图21中可知,在室内的大范围中ipmv为大于0的值,但是以靠近用户mb的位置的坐标(7,7)为中心的周围的ipmv为接近0的值。这是因为,进行了从负载侧单元103向坐标(7,7)的方向吹出空气的控制,ipmv的值下降。通过这样,能够以使用户ma和用户mb的多个用户的ipmv接近中立的方式使ipmv迅速地达到舒适区域并稳定。
[0115]
此外,参照图18所示的流程图说明了在步骤s109中在经过固定时间之后返回到步骤s101的情况,但是也可以返回到步骤s103。在该情况下,在步骤s103中,数据获取单元11从空气调节装置10获取作为用户信息的由红外线传感器140检测出的二维图像的数据。如果在存储装置21中构建的ipmv数据库适合于空气调节装置10和空气调节对象空间,则不需要频繁地更新。在该情况下,减轻模型生成单元12的运算处理的负荷。
[0116]
另外,在步骤s109中,活动量判定单元13和位置判定单元14也可以从空气调节装置10监视由红外线传感器140检测的二维图像的数据。在固定时间内活动量判定单元13判
定为用户的活动量不固定的情况和位置判定单元14无法判定室内有无用户的情况中的一方或两方的情况下,也可以改变从负载侧单元103吹出的空气的风向。具体地说,控制决定单元16向空气调节装置10发送用于进行使第一挡板4的水平方向的角度和第二挡板5的垂直方向的角度中的一方或两方的角度以固定的周期变化的摆动动作的控制信息。例如,第一挡板4的摆动动作是第一挡板4以水平基准θh0为基准向左右以20秒周期摆动的动作。在该情况下,信息处理装置2从空气调节装置10接收的环境信息和运转信息发生变化,控制装置22容易识别用户的活动量和位置。
[0117]
并且,在本实施方式1中,在图18所示的步骤s107中控制决定单元决定空气调节控制模式时,效率计算单元15使用式(3)来计算了各空气调节控制模式的舒适效率ζ,但是不限于该评价方法。效率计算单元15也可以使用topsis(technique for order of preference by similarity to ideal solution:逼近理想解排序法)来求出使多个用户的综合性舒适度最大的空气调节控制模式。在本实施方式1中,使用式(3)的评价方法与topsis相比计算量少,因此减轻控制装置22的运算处理的负荷。
[0118]
本实施方式1的空气调节系统1具有空气调节装置10、检测多个用户的每个用户的活动量和多个用户的每个用户的位置的人检测单元30、存储装置21以及控制装置22。存储装置21按多个活动量的每个活动量存储包含与空气调节装置10的多个空气调节控制模式分别对应的、空气调节对象空间中的用户的舒适性指标的分布即舒适性指标分布的组。控制装置22具有活动量判定单元13、位置判定单元14、效率计算单元15以及控制决定单元16。活动量判定单元13针对各用户确定与由人检测单元30检测出的活动量对应的组。位置判定单元14从确定出的组内的多个舒适性指标分布提取与由人检测单元30检测的位置对应的多个舒适性指标。效率计算单元15使用与各用户的位置对应地提取出的多个舒适性指标,针对多个空气调节控制模式的每个空气调节控制模式计算表示多个用户的综合性舒适度的舒适效率ζ。控制决定单元16求出多个空气调节控制模式中的使计算出的舒适效率ζ最大的空气调节控制模式。
[0119]
根据本实施方式1,与处于空气调节对象空间的各用户的活动量对应地求出包含与多个空气调节控制模式分别对应的空气调节对象空间中的舒适性指标分布的组。另外,与处于空气调节对象空间的各用户的位置对应地从组内的多个舒适性指标分布提取多个舒适性指标。然后,基于各用户的多个舒适性指标,从多个空气调节控制模式求出使多个用户的舒适效率最大的空气调节控制模式。通过由空气调节装置按照使多个用户的舒适效率最大的空气调节控制模式进行空气调节,能够谋求对多个用户提高舒适性。
[0120]
此外,在上述的实施方式1中以红外线传感器140作为人检测单元20发挥功能的情况进行了说明,但是人检测单元20不限于红外线传感器140。例如,活动量检测单元32也可以是可穿戴传感器。以下,说明活动量检测单元32为可穿戴传感器的情况。
[0121]
(变形例1)
[0122]
图22是表示变形例1的空气调节系统的一个结构例的图。在图22所示的结构中,对与参照图1说明的结构相同的结构附加相同的符号,在本变形例1中省略其详细的说明。
[0123]
空气调节系统1a具有:具有位置检测单元31的空气调节装置10、信息处理装置2、接入点(ap)60以及按每个用户设置的可穿戴终端40。ap 60设置于作为空气调节装置10的空气调节对象空间的室内。ap 60具有bluetooth(注册商标)等近距离无线通信单元(未图
示)以及与网络50的通信协议对应的网络通信单元(未图示)。通信协议例如是tcp/ip。位置检测单元31例如是图2所示的红外线传感器140。
[0124]
按每个用户设置可穿戴终端40。可穿戴终端40例如是手表或手镯的形态。可穿戴终端40具有以固定的周期检测脉搏来作为用户的活动量的活动量检测单元32。活动量也可以是用户的肌肤温度。另外,可穿戴终端40具有存储按每个终端不同的标识符即终端标识符和程序的存储器(未图示)以及按照程序执行处理的cpu(未图示)。
[0125]
当活动量检测单元32检测到用户的活动量时,可穿戴终端40的cpu(未图示)经由ap 60和网络50将包含活动量的信息和终端标识符的用户信息发送到信息处理装置2。可穿戴终端40的存储器(未图示)也可以存储有ap 60的设置位置的坐标。可穿戴终端40的cpu(未图示)参照与ap 60的无线电波的强度,估计ap 60的设置位置起的距离。然后,可穿戴终端40的cpu(未图示)将估计出的位置的信息作为用户的位置的信息包含在用户信息中。例如,在多个ap 60设置于室内的情况下,可穿戴终端40的cpu(未图示)通过将多个ap 60的无线电波的强度进行比较,能够更高精度地估计室内的用户的位置。信息处理装置2使从可穿戴终端40接收的用户信息与由位置检测单元31检测的用户的位置相对应起来。
[0126]
在本变形例1中,信息处理装置2也能够按照图18所示的过程从多个空气调节控制模式决定最佳的空气调节控制模式。在本变形例1的情况下,按每个用户穿戴的可穿戴终端40检测用户的活动量,因此更高精度地检测活动量。其结果,能够进行更适合于多个用户各自的活动量的空气调节。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1