马达轴旋转和控制器位置的指示的制作方法
1.本发明涉及加热、通风和空气调节,并且更具体地,涉及指示马达轴旋转和控制器位置。
背景技术:
2.加热、通风和空气调节系统(hvac)系统一般用于调节封闭区域的温度和湿度水平。hvac系统包括若干构件,诸如压缩机、冷凝器和蒸发器,以产生所需的加热和冷却。另外,hvac系统可包括管道、处理器和风门(damper),以控制各种区域中的空气流的方向和量。随着时间的推移,hvac系统的构件可能开始失效并需要维护。在对hvac系统进行维护之前,维修技术人员在对问题进行故障检修时可以测试和检验各种构件的操作。可能存在对于提供用于在远程位置中检验构件的操作的高效手段的需求。
技术实现要素:
3.根据实施例,提供了一种用于检验可变空气量(vav)设备的操作的方法。该方法包括由控制器在多个模式中的一个中由控制器操作具有联接到vav设备的马达轴的马达;由控制器控制联接到vav设备的马达轴的旋转方向;以及由控制器提供联接到vav设备的马达轴的旋转方向的指示。
4.除了本文描述的特征中的一个或多个之外,或作为备选方案,另外的实施例包括作为风门的vav设备,其中,风门可操作成沿第一方向和第二方向旋转,以调整空气流的量。
5.除了本文描述的特征中的一个或多个之外,或作为备选方案,另外的实施例包括使用由圆形led阵列提供的指示,其中,圆形led阵列被点亮并沿马达轴的方向旋转。
6.除了本文描述的特征中的一个或多个之外,或作为备选方案,另外的实施例包括在诸如定位模式、远程检验模式和禁用模式的多个模式中操作。
7.除了本文描述的特征中的一个或多个之外,或作为备选方案,另外的实施例包括定位模式,其点亮led阵列并将该led阵列作为频闪操作,以识别多个控制器中的当前正被访问的控制器。
8.除了本文描述的特征中的一个或多个之外,或作为备选方案,另外的实施例包括远程检验模式,其点亮led阵列并沿马达轴的旋转方向旋转led阵列。
9.除了本文描述的特征中的一个或多个之外,或作为备选方案,另外的实施例包括使控制器的离合器接合,以从vav设备的轴释放马达。
10.除了本文描述的特征中的一个或多个之外,或作为备选方案,另外的实施例包括使用布置在控制器上的按钮来使用被脱离接合的离合器,以从vav设备的轴释放马达。
11.根据实施例,提供了用于检验可变空气量(vav)设备的操作的系统。该系统包括控制器;vav设备,其中,控制器联接到vav设备;以及联接到控制器的指示器,其中,指示器配置成被点亮并沿联接到vav设备的马达轴的旋转方向旋转。控制器配置成在多个模式中的一个中操作联接到vav设备的马达;控制联接到vav设备的马达的旋转方向;以及提供联接
到vav设备的马达的旋转方向的指示。
12.除了本文描述的特征中的一个或多个之外,或作为备选方案,另外的实施例包括作为风门的vav设备,其中,风门可操作成沿第一方向和第二方向旋转。
13.除了本文描述的特征中的一个或多个之外,或作为备选方案,另外的实施例包括由圆形led阵列提供的指示器,其中,圆形led阵列被点亮并沿马达轴的方向旋转。
14.除了本文描述的特征中的一个或多个之外,或作为备选方案,另外的实施例包括控制器,该控制器进一步配置成在定位模式或远程检验模式中的至少一个中操作vav设备。
15.除了本文描述的特征中的一个或多个之外,或作为备选方案,另外的实施例包括定位模式,其点亮led阵列并将该led阵列作为频闪操作,以识别多个控制器中的哪个控制器正被访问。
16.除了本文描述的特征中的一个或多个之外,或作为备选方案,另外的实施例包括远程检验模式,其点亮并沿马达轴的旋转方向旋转led阵列。
17.除了本文描述的特征中的一个或多个之外,或作为备选方案,另外的实施例包括服务器或用户装置中的至少一个,以配置操作模式。
18.除了本文描述的特征中的一个或多个之外,或作为备选方案,另外的实施例包括控制器的离合器,以从vav设备的轴释放马达。
19.除了本文描述的特征中的一个或多个之外,或作为备选方案,另外的实施例包括按钮,该按钮配置成使离合器脱离接合,以从vav设备的轴释放马达。
20.除了本文描述的特征中的一个或多个之外,或作为备选方案,另外的实施例包括按钮,该按钮具有使led阵列能够在控制器外部可见的透镜。
21.除非另外清楚指示,否则前述特征和元件可以在没有排他性的情况下组合成各种组合。根据以下描述和附图,这些特征和元件及其操作将变得更加明显。然而,应当理解,以下描述和附图旨在本质上是说明性和解释性的,而非限制性的。
附图说明
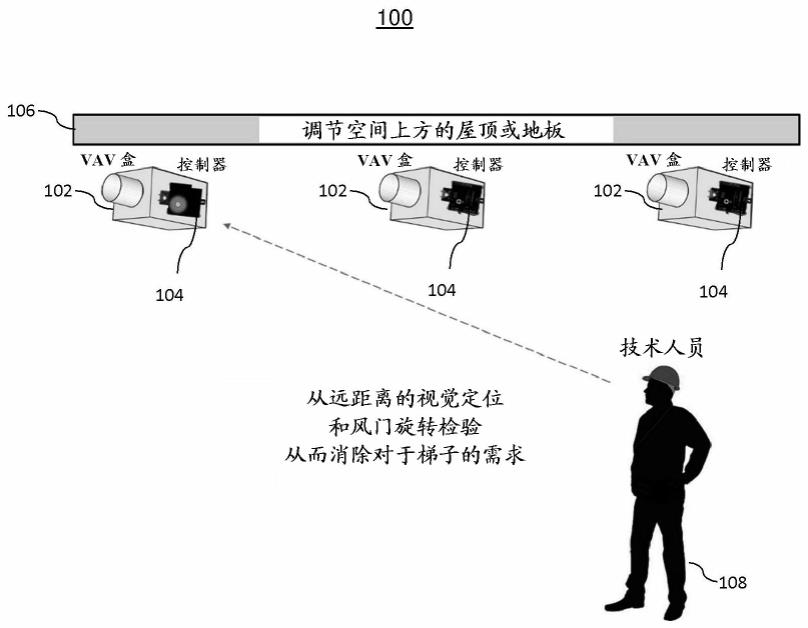
22.以下描述不应视为以任何方式进行限制。参照附图,相同的元件被相同地编号:图1描绘了根据本公开的一个或多个实施例的用于可变空气量(vav)设备的操作的远程视觉检验的系统100;图2描绘了根据本公开的一个或多个实施例的用于检验vav设备的操作的系统的框图;图3描绘了根据本公开的一个或多个实施例的用于检验vav设备的操作的示例发光二极管(led)阵列;以及图4描绘了根据本公开的一个或多个实施例的用于检验vav设备的操作的方法的流程图。
具体实施方式
23.用于加热、通风和空气调节(hvac)系统的设备常常位于较高并且技术人员在没有梯子或一些其它类型的能够在可变空气量(vav)设备的视觉检查中使用的设备的帮助的情况下不能达到的区域中。例如,诸如风门的vav设备布置在建筑物的屋顶下方,并且对于技
术人员的检查不是可方便地接近的。
24.风门可通过控制附接到马达轴的面板来调整空气流的量。轴可沿顺时针方向和逆时针方向操作以调整空气流的量,以便允许大范围的空气流。检验位于远程区域处的vav设备的操作的问题通过提供如下机构来解决,该机构提供了从远距离对vav设备的操作进行视觉检查的手段。因此,可消除对于梯子、升降机或对检查vav设备可能需要的其它设备的需求。
25.本文描述的一个或多个实施例的机构使得可从远距离检查和检验风门的操作。此外,本公开的方面的一个或多个实施例提供了定位进行维修的控制器和vav设备以及通过视觉指示来维修和检验风门马达轴旋转的方法,而技术人员不必靠近设备。
26.图1描绘了根据本公开的一个或多个实施例的使用控制器104的系统100,该控制器用于检验vav设备102的操作。如图1中所示,多个vav设备102位于建筑物的屋顶106中。位于地板或地平面上的希望得以接近多个vav设备102中的一个的技术人员108必须使用梯子或其它升降机类型设备来物理检查该设备。
27.如果需要检查多个其它vav设备102,则必须将梯子或升降机从第一个设备移动到下一个并以此类推,直到vav设备102中的每个都被检查,这随着需要检查的设备数量的增加而可变得非常耗时。另外,每次技术人员108使用梯子或升降机时,他们的安全可能有危险。控制器104可用于控制和检验vav设备102的操作。
28.图2描绘了根据一个或多个实施例的系统200的框图,该系统用于在维修和安装过程中指示和检验可变空气量设备风门马达轴旋转和控制器位置。
29.控制器104包括提供用于控制vav设备102和指示器或led阵列202的信号的微处理器(未示出)。微处理器可沿顺时针方向和逆时针方向控制和操作vav设备轴。led阵列202可接收信号以接通并点亮led阵列202。此外,led阵列202可接收信号以沿vav设备102的旋转方向旋转led阵列202。led阵列202的旋转可为技术人员108提供风门轴旋转的视觉指示。
30.在本公开的一个或多个实施例中,led可布置成圆形图案。在本公开的一个或多个实施例中,led可布置并装配在pcb上。led的圆形图案可按顺序被布置和点亮,以指示马达轴的旋转方向。例如,点亮led的顺序可指示顺时针方向或逆时针方向。led的圆形图案允许技术人员108立即确定风门的旋转方向。应当理解,可以使用其它机构来指示风门的马达轴的旋转方向,诸如但不限于声音通知、led的不同布置或led的各种顺序。
31.在本公开的一个或多个实施例中,可以使用多组led环来增加可观察led的可见性的距离。当在定位模式中操作时,每组led环可同时被点亮。如图1中所示,最左边的控制器104处于检查下。
32.图2还描绘了用于使风门轴与马达脱离接合的按钮或离合器机构212。当按钮未被按压时,离合器机构212在默认位置中将风门轴接合到马达。当按钮被按下时,当离合器机构212使风门轴与马达脱离接合时,风门轴可由技术人员手动旋转。当按钮被释放时,风门轴被重新接合到马达,并且微处理器可控制马达的操作。按钮可用作透镜、光导管或透明窗口,以使装配在pcb上的led能够在系统200的外壳外部可见。在本公开的一些实施例中,当该按钮被按下并且该风门轴旋转时,led将不被点亮。当风门马达处于由微处理器的自动控制下时,led可指示旋转方向。
33.服务器或用户装置210可用于通过通信接口206在网络204上与控制器104通信。服
务器或用户装置210能够利用诸如wifi或蓝牙的通信协议经由诸如局域网连接的网络204与控制器104通信。应当理解,用于有线或无线解决方案的其它通信协议也可用于与控制器104通信,并且不限于本文描述的示例。在本公开的一个或多个实施例中,led的操作模式可通过移动应用从控制器104中的嵌入式服务器或由建筑物自动化网络经由其服务器配置、启用和/或禁用。
34.图3描绘了根据本公开的一个或多个实施例的可用于检验vav设备102的操作的控制器104的布置。led阵列202可响应于来自控制器104中的微处理器(未示出)的指示马达轴顺时针旋转的信号而沿顺时针方向旋转。在本公开的一个或多个实施例中,控制器104可使用u形夹302联接到风门轴。类似地,led阵列202可响应于来自微处理器的指示马达轴逆时针旋转的信号而沿逆时针方向旋转。
35.led阵列202的高强度led使技术人员108能够从远距离远程检验vav设备102的操作。应当理解,可使用其它机构来提供马达旋转方向的指示,诸如但不限于声音通知、不同的颜色指示器、诸如箭头的方向指示器等。
36.图4描绘了根据本公开的一个或多个实施例的用于检验vav设备的操作的方法400的流程图。方法400可在诸如图1中示出的系统中实施。方法400在框402处开始并前进到框404,框404提供由控制器在多个模式中的一个中由控制器操作具有联接到vav设备的马达轴的马达。在本公开的一个或多个实施例中,多个模式包含检验模式、定位模式、正常模式及其它。当处于检验模式中时,执行led阵列202的点亮和旋转。当处于定位模式中时,可点亮特定控制器104的led阵列202,以识别感兴趣的控制器104。随后,可选择多个控制器104中的不同控制器104用于进一步检查。
37.在控制器定位器功能模式(定位模式)中,led阵列202的所有led可在控制器104中的微处理器的控制下从连接到网络的装置中的任何远程地接通和切断,以形成高强度频闪(strobe)。这可用于在视觉上识别建筑物或系统中的具体控制器104。微处理器还可向服务器或用户装置提供指示反馈,从而指示该单元处于频闪模式中。在检验模式中,控制器104的led阵列202可沿马达的方向旋转以检验马达和/或vav设备102的操作。
38.框406由控制器控制联接到vav设备的马达轴的旋转方向。控制器104可提供信号以控制马达调整风门的位置来控制空气流。框408提供联接到vav设备的马达轴的旋转方向的指示。马达可沿第一顺时针方向和逆时针方向旋转。led阵列可同步并沿马达的旋转方向旋转。方法400在框410处结束。
39.本文描述了本公开的一个或多个说明性实施例。这样的实施例对本公开的范围仅仅是说明性的,并且不旨在以任何方式进行限制。因此,本文公开的实施例的变化、修改和等效方案也在本公开的范围内。
40.本文描述的技术提供了一种机构,该机构提供风门轴旋转的视觉指示和控制器的识别。这避免了对于使用梯子或必须用于执行vav单元的物理检查的一些其它手段的需求。本文描述的技术允许技术人员检验和安装vav单元。通过消除梯子的使用,可减少总体维修时间,并且还可减少与梯子的使用者相关联的潜在安全问题。
41.本文参照附图以示例而非限制的方式呈现所公开的器具和方法的一个或多个实施例的详细描述。
42.术语“约”旨在包括与基于提交本技术时可用的设备的特定量的测量相关联的误
差程度。
43.本文使用的术语仅出于描述特定实施例的目的,并且不旨在限制本公开。除非上下文另外明确指示,否则如本文所使用的,单数形式“一”、“一个”和“该”也旨在包括复数形式。将进一步理解的是,当在本说明书中使用时,术语“包括”和/或“包含”指定所述特征、整数、步骤、操作、元件和/或构件的存在,但不排除一个或多个其它特征、整数、步骤、操作、元件构件和/或其组合的存在或添加。
44.尽管已经参照一个或多个示例性实施例描述了本公开,但本领域技术人员将理解,在不脱离本公开的范围的情况下,可以进行各种改变并且可以用等效物替换其元件。此外,在不脱离本公开的基本范围的情况下,可以进行许多修改以使特定情况或材料适于本公开的教导。因此,旨在本公开不限于作为用于实现本公开所设想的最佳模式而公开的特定实施例,而是本公开将包括落入权利要求范围内的所有实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1