一种烹饪装置及其控制方法与流程
本发明涉及厨房电器,尤其是一种烹饪装置,以及该烹饪装置的控制方法。
背景技术:
1、吸油烟机作为每个家庭必不可少的厨房电器,其作用是通过在蜗壳中高速旋转的叶轮将油烟从进风口吸入、利用叶轮过滤油烟、并将过滤后的油烟从出风口排出,完成厨房空气的净化工作,合理的进风口设置有利于提升吸油烟效果,减少油烟的逃逸,提升厨房空气质量。
2、传统吸油烟机的风机以固定档位或者转速运行,近年来吸油烟机风量越来越大,甚至出现了超30m3/min的机器。部分区域特别是北方考虑到冬季保暖需求,门窗密封条件比较好,吸油烟机固定档位运行容易因用户关闭屋内门窗导致出现补气不足,甚至抽真空情况(此时普通吸油烟机依然维持当前档位运行或者用户选择更高档位应对爆炒,加剧补气不足进而产生啸叫或抽真空,反而导致吸油烟效果下降,甚至可能出现马桶冒泡,从下水道补气倒灌异味等情况)。此外,用户在烹饪区一般有多种不同类型的烹饪动作,会对烹饪区域的发烟产生影响,如颠锅爆炒、下菜、揭锅盖瞬间油烟或水蒸气大等,而普通固定档位或仅仅根据公用烟道阻力运行的油烟机,难以适应此类突发的场景。
3、因此,还有待进一步改进。
技术实现思路
1、本发明所要解决的第一个技术问题是针对上述现有技术存在的不足,提供一种烹饪装置,识别室内补气情况,智能调整档位。
2、本发明所要解决的第二个技术问题是提供一种上述烹饪装置的控制方法,前置化预判用户烹饪操作及可能出现的油烟变化情况,从而进行自适应调整。
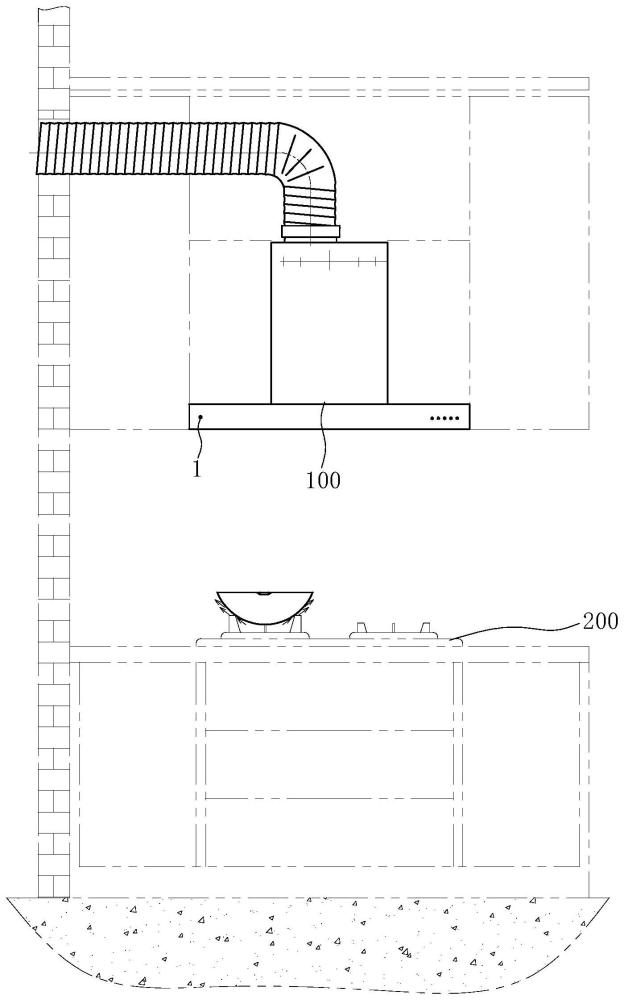
3、本发明解决上述第一个技术问题所采用的技术方案为:一种烹饪装置,包括吸油烟机,所述吸油烟机包括风机组件,其特征在于:所述烹饪装置还包括:
4、气压传感器,设置在吸油烟机的非进风区域,用于检测所述吸油烟机所在的室内气压;以及
5、处理器,根据气压传感器检测的气压控制吸油烟机的风机组件或作出提醒。
6、利用非进风区域的气压传感器(降低进风对气压干扰)用于检测室内气压,利用开机前后或运行一段时间后的室内气压变化判断当前是否补气足够,便于吸油烟机处于更智能工作档位,在大部分时间降低噪声,提升用户体验。
7、为减少温度对气压检测的影响,所述烹饪装置还包括用于检测所述吸油烟机所在的室内温度。
8、进一步地,所述烹饪装置还包括:
9、灶具,设置在吸油烟机的下方;
10、距离传感器,设置在吸油烟机上,用于检测吸油烟机与用户之间的距离;以及
11、压力传感器,用于检测灶具上的锅具的重量;
12、所述处理器分别与距离传感器和压力传感器电连接,从而判断用户的烹饪操作动作来控制吸油烟机的风机组件。
13、从而可结合距离、压力变化等动作前置化预判方式进行档位调整,进而可以实现补气是充足下的应对颠锅、揭锅盖、加菜等用户典型烹饪动作的应对,更为合理地调整吸油烟机档位,使得吸油烟机处于更智能工作档位。
14、进一步地,所述烹饪装置还包括:
15、灶具,设置在吸油烟机的下方,具有两个锅支架;以及
16、第一距离传感器和第二距离传感器,设置在吸油烟机的底部,每个锅支架对应一个距离传感器;
17、所述处理器分别与第一距离传感器和第二距离传感器电连接,从而判断用户的烹饪操作动作来控制吸油烟机的风机组件。
18、从而可结合距离、压力变化等动作前置化预判方式进行档位调整,进而可以实现补气是充足下的应对颠锅、揭锅盖、加菜等用户典型烹饪动作的应对,更为合理地调整吸油烟机档位,使得吸油烟机处于更智能工作档位。
19、进一步地,所述吸油烟机包括集烟罩、形成在集烟罩上的进风口以及设置在进风口之下的第一导烟板和第二导烟板,所述第一导烟板和第二导烟板左右间隔布置并且均能由处理器控制升降。
20、从而可结合距离、压力变化等动作前置化预判方式进行档位调整,甚至补气不足情况下的进风面积或流量调节,进而可以实现补气是充足下的应对颠锅、揭锅盖、加菜等用户典型烹饪动作的应对,更为合理地调整吸油烟机档位,使得吸油烟机处于更智能工作档位。
21、本发明解决上述第二个技术问题所采用的第一个技术方案为:一种如上所述的烹饪装置的控制方法,其特征在于:包括如下步骤:
22、1)所述吸油烟机启动;
23、2)所述处理器读取当前的所述气压传感器检测到的气压值p1以及室内温度值t1;
24、3)将p1根据t1换算到设定温度下的参考环境气压pa;
25、4)所述吸油烟机的风机组件按用户输入档位或默认档位运行;
26、5)等待所述风机组件运行平稳后,进入步骤6);
27、6)所述处理器读取当前的所述气压传感器检测到的气压值p2以及室内温度值t2;
28、7)将p2根据t2换算到参考环境气压pb;
29、8)所述处理器读取预设的气压下限参考值pi和气压上限参考值pj;
30、9)将|pb-pa|与pi、pj比较,并进行相应地操作:
31、9.1)如果|pb-pa|<pi,则表示补气充足,保持所述风机组件当前档位不变,然后回到步骤5);
32、9.2)如果pi≤|pb-pa|≤pj,则再判断pb>pa是否成立,如果是,则表示补气不足,降低所述风机组件档位运行,然后回到步骤5);如果否,则提示检修;
33、9.3)如果|pb-pa|>pj,则再判断pb>pa是否成立,如果是,则表示补气严重不足,提示开门或开窗,所述风机组件以最低档位运行,然后回到步骤5),如果否,则提示检修。
34、优选的,在步骤5)中,包括如下步骤:
35、5.1)等待t1时间;
36、5.2)读取或计算风机组件的转速;
37、5.3)判断是否记录到≥2组转速,如果是,进入步骤5.4),如果否,则回到步骤5.1);
38、5.4)判断最近测量的2组的转速差小于n1是否成立,如果是,表示所述风机组件运行已平稳,进入步骤6),如果否,则表示所述风机组件运行未平稳,回到步骤5.1);n1为预设的运行平稳转速差阈值。
39、本发明解决上述第二个技术问题所采用的第二个技术方案为:一种如上所述的烹饪装置的控制方法,其特征在于:包括如下步骤:
40、1)所述吸油烟机启动;
41、2)所述处理器读取当前的所述气压传感器检测到的气压值p1以及室内温度值t1;
42、3)将p1根据t1换算到设定温度下的参考环境气压pa;
43、4)所述吸油烟机的风机组件按用户输入档位或默认档位运行;
44、5)等待所述风机组件运行平稳后,进入步骤6);
45、6)所述处理器读取当前的所述气压传感器检测到的气压值p2以及室内温度值t2;
46、7)将p2根据t2换算到参考环境气压pb;
47、8)所述处理器读取预设的气压下限参考值pi和气压上限参考值pj;
48、9)将|pb-pa|与pi、pj比较,并进行相应地操作:
49、9.1)如果|pb-pa|<pi,则表示补气充足,保持所述风机组件当前档位不变,然后进入步骤10);
50、9.2)如果pi≤|pb-pa|≤pj,则再判断pb>pa是否成立,如果是,则表示补气不足,降低所述风机组件档位运行,然后回到步骤5);如果否,则提示检修;
51、9.3)如果|pb-pa|>pj,则再判断pb>pa是否成立,如果是,则表示补气严重不足,提示开门或开窗,所述风机组件以最低档位运行,然后回到步骤5),如果否,则提示检修;
52、10)所述处理器读取所述压力传感器当前的检测值以及距离传感器当前的检测值;
53、11)判断是否记录有≥2组压力值,如果否,将当前压力记录为f1,并回到步骤10),如果是,则将当前压力记录为f2,然后将f2和f1比较,并根据比较结果进行相应地操作:
54、11.1)f2<f1,且|f2-f1|>fa,则判断锅具400重量变低,再根据距离传感器的检测值判断吸油烟机前方是否有用户,如果是,判断进行颠锅炒菜,调高风机组件档位运行,然后回到步骤5);如果否,则降低风机组件档位运行,然后回到步骤5);
55、11.2)|f2-f1|≤fa,则保持风机组件当前档位运行,然后回到步骤5);
56、11.3)f2>f1,且|f2-f1|>fa,则调高风机组件档位运行,保持运行t2时间,恢复到增加前的档位,如果是,判断进行颠锅炒菜,调高风机组件档位运行,然后回到步骤5)。
57、优选的,在步骤5)中,包括如下步骤:
58、5.1)等待t1时间;
59、5.2)读取或计算风机组件的转速;
60、5.3)判断是否记录到≥2组转速,如果是,进入步骤5.4),如果否,则回到步骤5.1);
61、5.4)判断最近测量的2组的转速差小于n1是否成立,如果是,表示所述风机组件运行已平稳,进入步骤6),如果否,则表示所述风机组件运行未平稳,回到步骤5.1);n1为预设的运行平稳转速差阈值。
62、本发明解决上述第二个技术问题所采用的第三个技术方案为:一种如上所述的烹饪装置的控制方法,其特征在于:包括如下步骤:
63、1)所述吸油烟机开启;
64、2)判断是否进入智能模式;
65、3)读取ta时间内各传感器的检测值信息;
66、4)判断各距离传感器检测到的距离变化量≥l是否成立,l为预设的距离变化量阈值,如果是,进入步骤5);如果否,则判断≥tb时间内是否均无变化,tb>ta,如果是,则降低风机组件档位运行,回到步骤2),如果否,则进入步骤6);
67、5)判断距离变化是否发生在单侧,如果是,判断为是该侧有爆炒或菜下锅的场景,然后进入步骤6);如果否,则判断每一侧最接近变化的时间,计算两侧的这一时间的差值<tc是否成立,tc<ta,如果是,判断为需要用户迅速来回的动作,然后进入步骤6),如果否,则判断其中一侧有揭锅盖场景,然后进入步骤6);
68、6)所述处理器读取步骤3)记录的气压传感器和室内温度值的信息;
69、7)将气压传感器的气压值根据温度值换算到设定温度下的参考环境气压pa;
70、8)等待风机组件运行平稳后,进入步骤9);
71、9)所述处理器读取当前的气压传感器检测到的气压值p2以及室内温度值t2;
72、10)将p2根据t2换算到参考环境气压pb;
73、11)所述处理器读取预设的气压下限参考值pi和气压上限参考值pj;
74、12)将|pb-pa|与pi、pj比较,并进行相应地操作:
75、12.1)如果|pb-pa|<pi,则表示补气充足,根据步骤4)和5)判断的结果,确认是否有爆炒、揭锅盖或菜下锅的操作,如果是,调高风机组件档位运行,如果否则保持风机组件当前档位不变,然后回到步骤3);
76、12.2)如果pi≤|pb-pa|≤pj,则再判断pb>pa是否成立,如果pb>pa成立,则表示补气不足,提示开门或开窗,然后根据步骤4)和5)判断的结果,确认是否有爆炒、揭锅盖或菜下锅的操作,如果是,保持风机组件档位运行,然后回到步骤3),如果否,则降低风机组件档位运行,然后回到步骤3);如果pb>pa不成立,则提示检修;
77、12.3)如果|pb-pa|>pj,则再判断pb>pa是否成立,如果pb>pa成立,则表示补气严重不足,提示开门或开窗,然后根据步骤4)和5)判断的结果,确认是否有爆炒、揭锅盖或菜下锅的操作,如果是,降低风机组件档位运行,然后回到步骤3),如果否,则风机组件以最低档位运行,然后回到步骤3),如果pb>pa不成立,则提示检修。
78、优选的,在步骤8)中,包括如下步骤:
79、8.1)读取或计算风机组件的转速;
80、8.2)判断是否记录到≥2组转速,如果是,进入步骤8.3),如果否,则等待t1时间后回到步骤8.1);
81、8.3)判断最近测量的2组的转速差小于n1是否成立,如果是,表示风机组件运行已平稳,进入步骤9),如果否,则表示风机组件运行未平稳,则等待t1时间后回到步骤8.1);n1为预设的运行平稳转速差阈值。
82、本发明解决上述第二个技术问题所采用的第四个技术方案为:一种如上所述的烹饪装置的控制方法,其特征在于:包括如下步骤:
83、1)所述吸油烟机开启;
84、2)判断是否进入智能模式;
85、3)读取ta时间内各传感器的检测值信息;
86、4)判断各距离传感器检测到的距离变化量≥l是否成立,l为预设的距离变化量阈值,如果是,进入步骤5);如果否,则判断≥tb时间内是否均无变化,tb>ta,如果是,则降低风机组件档位运行,回到步骤2),如果否,则进入步骤6);
87、5)判断距离变化是否发生在单侧,如果是,判断为是该侧有爆炒或菜下锅的场景,然后进入步骤6);如果否,则判断每一侧最接近变化的时间,计算两侧的这一时间的差值<tc是否成立,tc<ta,如果是,判断为需要用户迅速来回的动作,然后进入步骤6),如果否,则判断其中一侧有揭锅盖场景,然后进入步骤6);
88、6)所述处理器读取步骤3)记录的气压传感器和室内温度值的信息;
89、7)将气压传感器的气压值根据温度值换算到设定温度下的参考环境气压pa;
90、8)等待风机组件运行平稳后,进入步骤9);
91、9)所述处理器读取当前的气压传感器检测到的气压值p2以及室内温度值t2;
92、10)将p2根据t2换算到参考环境气压pb;
93、11)所述处理器读取预设的气压下限参考值pi和气压上限参考值pj;
94、12)将|pb-pa|与pi、pj比较,并进行相应地操作:
95、12.1)如果|pb-pa|<pi,则表示补气充足,然后根据步骤4)和5)判断的结果,确认是否有爆炒、揭锅盖或菜下锅的操作,如果是,调高风机组件档位运行,如果否则保持风机组件当前档位不变,然后回到步骤3);
96、12.2)如果pi≤|pb-pa|≤pj,则再判断pb>pa是否成立,如果pb>pa成立,则表示补气不足,提示开门或开窗,然后根据步骤4)和5)判断的结果,确认是否有爆炒、揭锅盖或菜下锅的操作,如果是,降低风机组件档位运行,并且相应侧的导烟板下移,而另一侧的导烟板则上移,然后回到步骤3),如果否,则降低风机组件档位运行,然后回到步骤3);如果pb>pa不成立,则提示检修;
97、12.3)如果|pb-pa|>pj,则再判断pb>pa是否成立,如果pb>pa成立,则表示补气严重不足,提示开门或开窗,然后根据步骤4)和5)判断的结果,确认是否有爆炒、揭锅盖或菜下锅的操作,如果是,降低风机组件档位运行,并且相应侧的导烟板下移,而另一侧的导烟板则上移关闭,然后回到步骤3),如果否,则风机组件以最低档位运行,然后回到步骤3),如果pb>pa不成立,则提示检修。
98、优选的,在步骤8)中,包括如下步骤:
99、8.1)读取或计算风机组件的转速;
100、8.2)判断是否记录到≥2组转速,如果是,进入步骤8.3),如果否,则等待t1时间后回到步骤8.1);
101、8.3)判断最近测量的2组的转速差小于n1是否成立,如果是,表示风机组件运行已平稳,进入步骤9),如果否,则表示风机组件运行未平稳,则等待t1时间后回到步骤8.1);n1为预设的运行平稳转速差阈值。
102、与现有技术相比,本发明的优点在于:利用非进风区域的气压传感器(降低进风对气压干扰)用于检测室内气压,利用开机前后或运行一段时间后的室内气压变化判断当前是否补气足够,便于吸油烟机处于更智能工作档位,在大部分时间降低噪声,提升用户体验;可以结合距离、压力变化等动作前置化预判方式进行档位调整,甚至补气不足情况下的进风面积或流量调节,进而可以实现补气是充足下的应对颠锅、揭锅盖、加菜等用户典型烹饪动作的应对。
- 还没有人留言评论。精彩留言会获得点赞!