一种空气净化消杀系统及消杀方法与流程
本发明涉及空气净化,尤其是一种空气净化消杀系统及消杀方法。
背景技术:
1、在大型室内空间,如医院、学校、楼宇大堂、影院、文体场馆等场地人员流动大且空间较为闭塞,易成为传染病毒的高危区域。在这样的场景内,保持空气相对清洁及无菌,是减少感染病毒发生率的最直接、最有效方法。
2、在空气病毒传播中以微生物污染物(细菌真菌和病毒)、颗粒污染物(pm2.5)、挥发性有机化合物(tvoc)三大类污染物为主。目前对以上污染物的消杀手段主要分为有人工消杀、机械消杀,其中人工消杀需要消毒人员穿上防护服,携带消杀装置在指定区域内喷洒消毒剂,费时、费力、成本高,而且消毒人员存在感染的风险,不能完全保证消毒人员的安全。而机械消杀需要在消杀装置中补充消毒液,每次补充消毒液体比较困难,消杀装置普遍体积较大,移动不便,对高危区域无法灵活及时的进行消杀作业,使用不方便。
3、为解决以上问题,公开号为cn 115671357 a,发明名称为一种紫外消杀结合空气净化的自动路径规划系统的发明创造,公开了一种紫外消杀结合空气净化的自动路径规划系统,包括环境消杀控制系统、空气消杀与净化系统、uvc-led、人机交互系统、任务控制系统、空气质量检测系统、移动控制系统、人体保护警戒系统、机器人防跌倒系统;包括激光雷达、相机、超声波、惯性测量单元等传感器,以工业控制计算机作为处理单元,采用工业平板作为人机交互界面,以uvc-led、光触媒、高锰酸钾粒子、纳米纤维hepa过滤网对环境进行消杀与净化,超声波传感器位于机器人底部,能使机器人感知所处的路面是否有阶梯或者凹坑,以此构建消杀机器人的防跌倒系统,空气质量检测系统还会生成空气质量地图,作为机器人路径规划的重要参数之一。所述发明创造虽然公开了一种紫外消杀结合空气净化的自动路径规划系统,但没有具体公开路径规划的具体实施方法。由此可见,消杀装置如何实现消杀路径的规划是目前空气消杀领域需要解决的重要问题之一。
技术实现思路
1、针对现有技术存在的上述问题,本发明的目的是提供一种空气净化消杀系统,通过联邦学习机制,根据获取的空气质量指标进行污染程度以及未来污染程度的预测;基于所述预测协调消杀机器人在指定地点进行消杀。
2、本发明的另一目的是提供一种空气净化消杀方法。
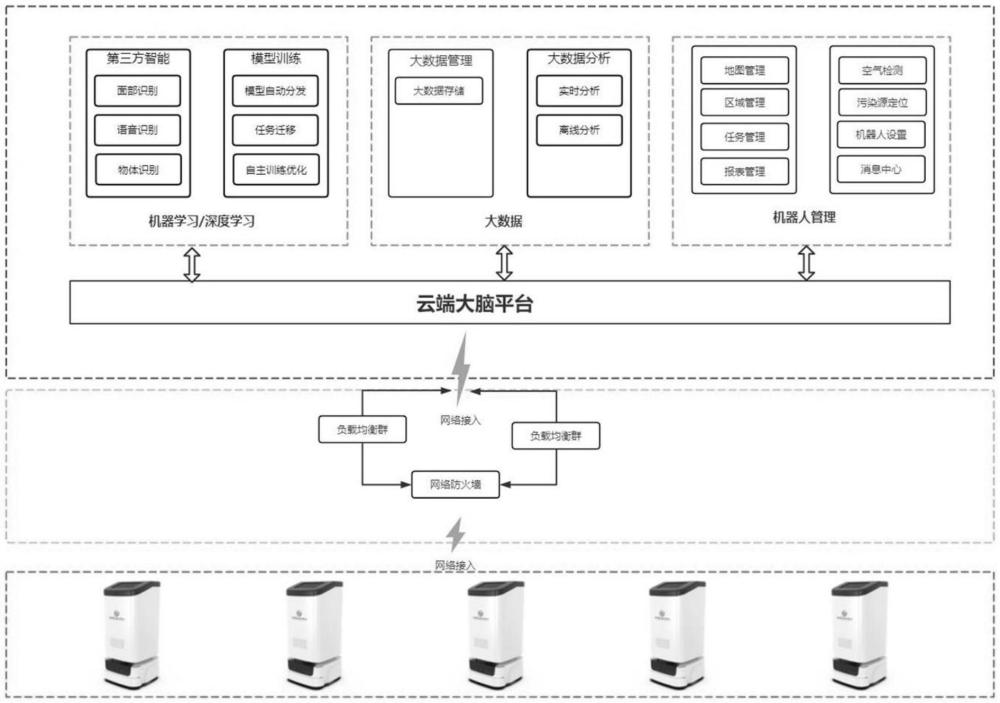
3、为解决上述问题,本发明采用如下技术方案:一种空气净化消杀系统,包括空气质量数据采集系统、大数据存储、处理系统、联邦学习系统、机器人管理系统;
4、空气质量采集系统将获取的空气质量数据发送至大数据存储、处理系统,所述大数据存储、处理系统将空气质量数据发送至联邦学习系统,所述联邦学习系统基于对所述数据进行分析处理,并将分析结果同步至机器人管理系统。
5、机器人管理系统控制消杀机器人做消杀作业。
6、在一些实施例中,所述空气质量数据采集系统用于采集tvoc,co2,pm25,pm10数据,并将所述数据通过mqtt通信协议传输至大数据存储、处理系统。
7、在一些实施例中,所述大数据存储、处理系统用于存储空气质量采集系统采集的空气质量数据,并同步至联邦学习系统。
8、在一些实施例中,所述联邦学习系统通过对空气质量数据的学习,动态更新模型参数;对获取的实时数据进行分析,并将分析结果实时同步到机器人管理系统。
9、在一些实施例中,所述机器人管理系统包括地图管理模块、区域管理模块、任务管理模块、报表管理模块、空气检测模块、污染源定位模块、机器人设置模块、消息中心模块;其中,
10、地图管理模块用于管理为任一消杀机器人创建的地图,为每一消杀机器人设唯一标识,记录所述消杀机器人地图信息,记录消杀机器人位置坐标,记录机器人充电桩位置;
11、区域管理模块用于管理任一消杀机器人巡逻、空气污染物检测、消杀净化区域;
12、任务管理模块用于管理任一消杀机器人净化消杀任务;
13、报表管理模块用于管理任一消杀机器人历史消杀任务、当前消杀任务、计划消杀任务;
14、空气检测模块用于管理任一机器人上报巡逻区域内检测到的空气污染物指标;
15、污染源定位用于根据获取的空气污染物指标数据及类型,定位至对应消杀机器人巡逻区域的指定位置;
16、机器人设置模块用于设置消杀机器人的巡逻区域、巡逻路线、充电桩位置;
17、消息中心模块用于实时查看各消杀机器人在线、离线、充电、消杀净化状态。
18、在一些实施例中,所述联邦学习系统,一个消杀机器人的id与存储的空气质量指标数据成一一对应关系,系统对每一id采集的空气质量指标数据设学习模型,
19、大数据存储的每一组空气质量指标数据对应一个联邦学习模型,k组数据有k个联邦学习模型分别进行模型的训练及模型参数更新,每个联邦学习模型参数使用同态加密技术进行传输;
20、在k(k≥2)个联邦学习模型中每一个模型参数基于同态加密技术输入到fate中的arbiter,arbiter对接收到的加密模型参数进行加权平均,然后将加密的全局模型参数再回传给每一个联邦学习模型以更新各自模型的参数,实现n个模型的训练建模;
21、每一参与方在本地训练模型后,会生成一组神经网络的权重,这些参数同态加密后被发送到中央服务器arbiter进行加权平均,一个参与方的样本数是ni,全局样本数是n,那么该参与方的权重为ni/n
22、
23、其中,wglobal是全局模型参数,wi是第i个参与方的模型参数,k是参与方的数量。
24、本技术的另一目的在于提供一种空气净化消杀方法,包括步骤
25、s1、地图创建及区域选择:基于目标净化消杀区域的形状、面积地理信息,采用自由空间的路径规划算法建立环境模型;
26、s2、空气污染物指标采集:消杀机器人在巡逻过程中,通过传感器实时采集tvoc、co2、pm25、pm10、温度、湿度指标,并将指标数据通过mqtt协议上传至大数据存储、处理系统,消杀机器人id与存储的指标数据形成一一对应关系;
27、s3、联邦学习算法借助历史指标数据,基于多方安全计算的联邦学习实现模型参数的更新,并预测;
28、s4、指令下发,对各消杀机器人下发指定消杀任务;
29、s5、空气净化消杀。
30、在一些实施例中,所述指令下发具体为,
31、包括定点净化消杀,基于实时空气质量指标数据,基于多方安全计算的联邦学习定位到空气污染物含量高于设定值的区域,云端大脑平台下发指令协调至少一台消杀机器人至指定区域执行消杀任务;
32、包括净化消杀,基于实时空气质量指标数据,基于多方安全计算的联邦学习定位到空气污染物含量高于设定值的时间段,云端大脑平台创建消杀净化任务,下发指令协调至少一台消杀机器人在指定时间段到重污染区域执行消杀任务。
33、在一些实施例中,所述消杀采用双极离子净化消杀,消杀机器人接收到指令,运行至指定区域打开双极离子发生器并向周围空气中散发高浓度正负离子,空气中的细菌、病毒、pm2.5、pm10以及tvoc气体与正负离子碰撞后荷上异极性的电荷,超细颗粒物吸附在大颗粒物之上,凝并成大颗粒物之后落入排尘土槽。
34、在一些实施例中,两台以上消杀机器人前往同一指定区域进行消杀任务时,各消杀机器人通过激光雷达、超声波传感器、深度相机实现消杀机器人间的相互识别防止碰撞。
35、相较于现有技术,本发明的有益技术效果在于:
36、1.本发明所述的空气净化消杀系统,消杀机器人与云端大脑通讯链接,云端大脑包括大数据存储、处理系统、联邦学习系统、机器人管理系统,大数据存储、处理系统接收并将空气质量数据同步至联邦学习系统,联邦学习系统对获取的空气质量数据分析、做消杀判断,并将数据分析结果同步至机器人管理系统,机器人管理系统下发消杀指令,消杀机器人接收指令并完成消杀任务;本技术所述消杀系统全程无需人为介入,最大限度地降低了消毒人员感染的风险,保证消毒人员的安全;
37、2.本发明基于获取的空气质量数据,通过联邦学习分析当下或者预测未来某一区域空气污染的程度,根据污染程度协调机器人协同作业,有效提高消杀效率;
38、3.本发明通过自由空间的路径规划算法使消杀机器人更加精确、高效和节能地完成任务,使消杀作业快捷高效;
39、4.本发明采用双极离子空气消杀净化方法,无需补充消毒液,极大地降低了消杀设备的维护成本。
- 还没有人留言评论。精彩留言会获得点赞!