本发明涉及空气净化领域,具体涉及空气净化系统的传感器控制方法。
背景技术:
1、目前用于空气净化系统的传感器控制方法虽然在一定程度上能够提供环境监测和空气净化的解决方案,但仍然存在一些明显的不足和弊端,制约了其在实际应用中的效果和广泛推广。首先,传统的空气净化系统传感器大多采用静态部署方式,即在特定位置放置固定数量和类型的传感器。这种静态部署无法动态响应环境变化,容易产生监测盲区,尤其在空气污染源或污染物浓度发生突变时,系统难以作出及时反应。例如,在空气污染源的扩散路径发生变化时,固定传感器无法实时调整位置和密度,导致污染物浓度监测不全面,进而影响空气净化系统的精准控制。
2、其次,现有传感器控制方法通常缺乏足够的智能化和自适应能力。大多数系统只是单纯地依据空气中某些特定污染物的浓度数据进行净化设备的运行控制,而忽视了污染物的扩散路径、浓度变化速率以及不同污染物之间的相对危害程度。这样,系统会在污染物浓度较低或变化较慢的情况下启动高强度的净化设备,而在污染物浓度较高、扩散较迅速的情况下,设备的响应却不够及时或力度不够,导致净化效率降低,资源浪费。更进一步,目前的空气净化传感器大多依赖单一污染物的监测,忽视了空气质量中各类污染物的相互作用。空气中的污染物通常是多种多样的,如pm2.5、二氧化氮(no2)、一氧化碳(co)、挥发性有机化合物(vocs)等,而不同污染物对健康的危害程度不同,且它们的扩散特性和相互作用也存在较大差异。然而,现有的传感器控制方法未能综合考虑这些多元化的污染物及其与环境因素(如风速、气温、湿度等)的互动,导致系统未能全面评估空气质量的真实状态,且在净化资源的调度和使用上缺乏科学性,最终影响净化效果和系统的整体性能。此外,目前的传感器控制方法大多数依赖简单的监测数据来进行空气净化设备的开关控制,而缺乏基于流体动力学或污染物扩散模型的深度分析。污染物的扩散过程不仅受空气流动的影响,还与温度、湿度等因素密切相关,而现有系统往往忽视了这些复杂因素的交互作用,无法准确预测污染物在不同环境下的分布变化。
3、即便是某些系统能够根据污染源的位置进行监测与预测,但其通常依赖于静态的污染物扩散模型,忽视了空气质量动态变化的特性,无法在突发污染源或污染物浓度大幅波动时及时做出调整。此外,现有空气净化系统中的传感器控制大多无法实现智能化的资源分配。空气净化设备通常具有多个工作参数,例如风量、过滤器性能、活性炭吸附强度、紫外灯开关时间等,这些参数对于不同污染物的净化效果具有重要影响。然而,当前的大多数空气净化系统未能基于污染物的浓度、变化率、扩散路径及其优先级等因素对这些工作参数进行动态调节。这样,当某些污染物浓度较高时,系统会调整多个参数,导致资源的浪费。而当污染物浓度较低时,系统又忽视部分关键污染物的净化需求,无法保证良好的空气质量。
技术实现思路
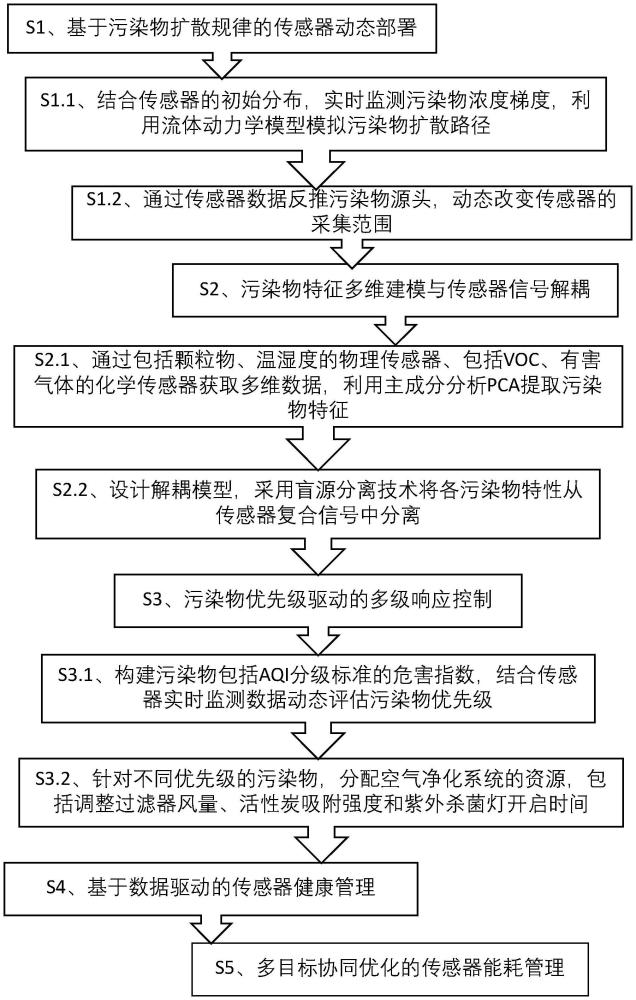
1、本发明的目的是提供空气净化系统的传感器控制方法,从而解决背景技术中所指出的部分弊端和不足;本发明解决其上述的技术问题所采用以下的技术方案:空气净化系统的传感器控制方法,包括:s1、基于污染物扩散规律的传感器动态部署:
2、s1.1、结合传感器的初始分布,实时监测污染物浓度梯度,利用流体动力学模型模拟污染物扩散路径;
3、s1.2、通过传感器数据反推污染物源头,动态改变传感器的采集范围;
4、s2、污染物特征多维建模与传感器信号解耦:
5、s2.1、通过包括颗粒物、温湿度的物理传感器、包括voc、有害气体的化学传感器获取多维数据,利用主成分分析pca提取污染物特征;
6、s2.2、设计解耦模型,采用盲源分离技术将各污染物特性从传感器复合信号中分离;
7、s3、污染物优先级驱动的多级响应控制:
8、s3.1、构建污染物包括aqi分级标准的危害指数,结合传感器实时监测数据动态评估污染物优先级;
9、s3.2、针对不同优先级的污染物,分配空气净化系统的资源,包括调整过滤器风量、活性炭吸附强度和紫外杀菌灯开启时间;
10、s4、基于数据驱动的传感器健康管理:
11、s4.1、构建传感器数据异常检测机制,通过机器学习算法分析传感器运行状态;
12、s4.2、引入自适应校准算法,根据环境基准值实时调整包括温湿度对颗粒物传感器的干扰校正的传感器输出;
13、s4.3、根据传感器健康状态预测结果,动态调整传感器维护与更换周期;
14、s5、多目标协同优化的传感器能耗管理:
15、s5.1、记录传感器不同采样频率下的能耗特性,建立能耗与监测精度的映射模型;
16、s5.2、结合污染物优先级、监测范围、传感器健康状态,动态调整采样频率与工作模式。
17、进一步地,所述基于污染物扩散规律的传感器动态部署方法包括:
18、每个传感器实时采集空气中污染物的浓度数据,并将数据传输至控制中心;控制中心基于实时的传感器数据以及包括温度、湿度、风速的环境条件更新污染物扩散的流体动力学模型,计算污染物在空气中的扩散路径和浓度变化;流体动力学模型根据污染物浓度的时间变化与扩散速度建立方程式,通过以下控制方程进行描述:
19、
20、其中,δc(x,t)表示污染物浓度在位置x和时间t上的变化率,反映污染物浓度随时间的变化;c(x,t)为污染物浓度,描述的是在位置x和时间t处的污染物浓度值;d(x)是污染物的扩散系数,表示污染物在空气中扩散的能力,值通常与环境温度、湿度因素相关,反映污染物从高浓度区向低浓度区扩散的速率;是扩散项,其中表示空间梯度算符,表示散度算符,计算污染物浓度的空间变化率;s(x,t)是污染源项,表示单位时间内污染源的污染物释放量。
21、进一步地,所述基于污染物扩散规律的传感器动态部署方法包括:
22、通过对污染物浓度梯度的计算,评估污染物的扩散方向和污染源的位置;污染物浓度梯度计算基于流体动力学模型的输出,结合传感器实际采集的数据,对污染源和扩散路径进行预测与评估;而计算污染物浓度梯度采用以下微积分公式:
23、
24、其中,表示污染物浓度在位置x和时间t上的梯度,反映污染物浓度随空间位置变化的程度,即污染物在空间上从某一位置扩散到相邻位置的浓度差异;表示污染物浓度c在位置x上的空间一阶导数,反映浓度在不同位置的变化速率;是积分操作,表示浓度变化随时间的累积效应。
25、进一步地,所述基于污染物扩散规律的传感器动态部署方法包括:
26、根据实时计算的污染物浓度梯度和扩散路径,动态调整传感器的位置和数量,优化传感器的密度分布;动态优化传感器部署的过程通过以下公式进行调整:
27、
28、其中,n(x,t)表示在位置x和时间t上的传感器密度,位置上传感器的数量或部署频率;δc(x,t)是污染物浓度变化,表示污染物在区域x和时间t上的浓度变化量;δcmax是系统预设的浓度变化限制,用于标准化浓度变化的影响;是空间上的积分运算,反映了污染物浓度变化在区域[x0,x]上的累积效应。
29、进一步地,所述污染物优先级驱动的多级响应控制方法包括:
30、通过监测不同污染物的浓度变化、扩散路径、以及对健康的危害程度,为每种污染物赋予优先级系数;污染物的优先级随着时间动态变化,基于污染物浓度与环境因素的综合考虑,优先级评估公式:
31、
32、所述优先级评估公式用于评估污染物i在时间t的优先级pi(t);通过对污染物浓度、浓度变化率和扩散特性进行加权积分,综合计算出污染物的优先级;ci(t′)表示污染物t在时间t′时的浓度,反映污染物的当前污染水平;ri(t′)是污染物i的浓度变化率,表示浓度变化的快慢,反映污染物扩散的速率;di(t′)是污染物的扩散特性;λ1,λ2,λ3是权重系数,用于调整浓度、变化率和扩散特性对优先级的影响程度;a,b,c是指数,控制浓度、变化率和扩散特性对优先级的非线性影响。
33、进一步地,所述污染物优先级驱动的多级响应控制方法包括:
34、引入污染物浓度与净化设备处理效率之间的多维映射控制模型;所述多维映射控制模型包括污染物的浓度、净化设备的处理能力以及环境因素,在不同污染物浓度区间内自适应调整净化设备的工作状态;多维映射控制公式:
35、
36、所述多维映射控制公式用于计算污染物i在时间t时的处理效率ei(t),并通过积分建立污染物浓度与净化设备效率之间的关系;其中,ci(t)是污染物i在时间t的浓度,表示污染物当前的浓度水平;α和β是参数,分别控制指数衰减部分的幅度和衰减速度;γ和δ是参数,控制余弦函数部分的幅度和周期性变化,代表处理效率在浓度变化区间内的周期性调整;积分上下限为0和ci(t),通过积分计算污染物浓度范围内的处理效率。
37、进一步地,所述污染物优先级驱动的多级响应控制方法包括:
38、引入基于流体动力学模型与污染物扩散预测算法的系统,用于模拟污染物的扩散路径与浓度变化;通过考虑污染源的分布、强度及包括风速、气温、湿度气象条件,动态模拟空气中污染物的扩散过程,并对污染物的未来分布进行预测;扩散模拟与预测公式:
39、
40、所述扩散模拟与预测公式描述污染物在空间和时间t下的扩散和迁移过程,结合流体动力学原理模拟污染物的扩散路径和浓度变化;是位置和时间t时的污染物浓度,反映污染物在空间中的分布;是位置和时间t时的污染物扩散系数,反映污染物的扩散能力;是空气流速向量,表示污染物随空气流动的迁移速率;是污染源的强度,描述污染物的产生速率;是梯度运算符,用于计算空间中浓度的变化率,表示对扩散流的散度运算,代表污染物扩散的趋势。
41、进一步地,所述污染物优先级驱动的多级响应控制方法包括:
42、采用自适应的资源分配机制,根据污染物的优先级、浓度和扩散预测动态调整空气净化系统的工作参数;综合污染物的浓度,健康影响和扩散趋势来动态调节过滤器风量、活性炭吸附强度和紫外灯开关时间资源,而资源分配模型公式:
43、
44、所述资源分配模型公式用于计算污染物i在时间t时所需的资源分配量ri(t),基于污染物的优先级来调整净化设备的资源分配;其中,pj(t)是污染物j在时间t时的优先级,反映污染物的处理紧急程度;αj是加权系数,表示污染物j对净化设备资源分配的贡献度;β是整体资源调节系数,用于控制资源分配的总量;n表示污染物的数量,模型考虑所有污染物的优先级加权求和。
45、本发明的空气净化系统的传感器控制方法,结合了污染物浓度监测、动态资源分配、污染物扩散预测及优先级驱动的多级响应控制,有效提高了空气净化系统的智能化和自适应能力。其有益效果可以总结如下:
46、通过基于污染物浓度的实时监测和扩散预测,系统能够及时获取空气中污染物的浓度变化和扩散路径,动态调整传感器位置与数量。这种自适应的部署方式能够确保污染物浓度变化的区域得到充分覆盖,从而提高了监测精度和反应速度。
47、通过评估污染物的浓度、变化速率和扩散特性,本发明的控制方法可以为不同污染物分配不同的优先级。合污染物浓度、优先级和扩散预测,系统能够智能调整资源分配,优化空气净化设备的工作参数(如过滤器风量、活性炭吸附强度和紫外灯开关时间等)。