改善了效率的热泵的制作方法
1.本发明涉及改善了效率的热泵(heat pump having improved efficiency)。
背景技术:
2.热泵是从热源向称之为“散热器”的目的地传递热的装置。热泵在冷空间吸收热,向热空间释放热。包括空调在内的空调装置(hvac:heating ventialating and air conditioning)及冰箱是热泵的代表性示例。而且,使用热泵的设备有提供冷水/热水的净水器、干燥器、洗衣机、自动售货机等。
3.热泵包括压缩机、冷凝器、膨胀阀及蒸发器。一般而言,已知空调比电扇多耗电约20倍。如果以此为基础计算,压缩机耗电90%,冷凝器扇及蒸发器扇分别耗电5%。
4.在以往技术中,为了减小压缩机耗电而使用变频压缩机,如果负载小,则以低频率运转。如果压缩机入口压力与出口压力的差异增大,则即使以相同频率运转,压缩机也消耗更多电。在多负载条件下实施测量的制冷期间能量消耗效率(cspf)及综合制冷效率(ieer)只有积极达成目标低压与目标高压才能改善热泵效率,尽管如此,以往未将压缩机的入口压力与出口压力设置为最优先达成目标进行控制,因而存在效率低的问题。
5.而且,在us 2009/00137001及申请号kr 10
‑
2016
‑
0072934等中,利用耗电大的压缩机来达成目标压力(低压),因而存在耗电变动大的问题。
6.<现有专利文献>
7.申请号kr 10
‑
2007
‑
7009952(us2009/0013700a1)
8.申请号kr 10
‑
2016
‑
0072934
9.申请号kr 10
‑
2013
‑
0084665(us2015/0020536a1)
10.申请号kr 10
‑
2016
‑
7026740(us 2016/0370044 a1)
11.申请号10
‑
2007
‑
0084960
12.us 2011/0041523 a1
13.us 7,010,927 b2
14.us 9,738,138 b2
15.us 2017/0059219 a1
16.us 2017/0115043 a1
17.<现有非专利文献>
18.myung sup yoon、jae hun lim、turki salem m al qahtani、and yujinnam、“experimental study on comparison of energy consumption between constant and variable speed air
‑
conditioners in two different climates
””
,asian conference on refrigeration and air
‑
conditioning june 2018,sapporo,japan
技术实现要素:
19.技术问题
20.针对以多负载条件来测量效率的热泵,在各负载条件下设置目标高压与目标低压,使得最优先达成所述目标压力。另外,旨在提供一种热泵,不利用耗电大的压缩机达成目标压力,从而改善效率。
21.解决问题的方案
22.本发明的热泵包括可变容量压缩机(c)、冷凝器(hex_c)、膨胀阀(exv)及蒸发器(hex_e)的回路通过密闭的冷媒管线而连接,所述热泵包括冷凝器扇(fn_c)、蒸发器扇(fn_e)、向所述回路填充冷媒或从所述回路回收冷媒的冷媒(填充)量调节手段(raam)及控制器224,其特征在于,所述控制器224的作用包括:1)参照外部气体温度及负载来设置室外热交换器(hex_ex)内部的目标压力,2)参照内气温度及设置温度来设置室内热交换器(hex_in)内部的目标压力,3)设置目标过冷度(sc_t)及目标过热度(sh_t),4)控制使得实现调节所述两个风扇全体温度或调节全体压力中的某一者;4a)当调节所述两个风扇全体温度时,通过所述冷凝器扇(fn_c)调节过冷度(sc),通过所述蒸发器扇(fn_e)调节过热度(sh),通过所述膨胀阀(exv)及冷媒(填充)量调节手段(raam)两者中某一者调节高压(hp),通过其余一者调节低压(lp)[情形(a)(a')];4b)当调节所述两个风扇全体压力时,通过所述冷凝器扇(fn_c)调节高压(hp),通过所述蒸发器扇(fn_e)调节低压(lp),通过所述膨胀阀(exv)及冷媒(填充)量调节手段(raam)两者中某一者调节过冷度(sc),通过其余一者调节过热度(sh)[情形(b)(b')];5)参照负载来控制所述压缩机(c),使得单位时间压缩既定冷媒(g/s);随着时间从0时到24时,如果负载缓慢变化,则所述热泵消耗的电力也以与负载类似的形态缓慢变化。
[0023]
本发明的热泵包括可变容量压缩机(c)、冷凝器(hex_c)、膨胀阀(exv)及蒸发器(hex_e)的回路通过密闭的冷媒管线而连接,所述热泵包括冷凝器扇(fn_c)、蒸发器扇(fn_e)、向所述回路填充冷媒或从所述回路回收冷媒的冷媒(填充)量调节手段(raam)及控制器224,其特征在于,所述控制器224的作用包括:1)参照外部气体温度及负载来设置室外热交换器(hex_ex)内部的目标压力,2)参照内气温度及设置温度来设置室内热交换器(hex_in)内部的目标压力,3)设置目标过冷度(sc_t)及目标过热度(sh_t),4)控制使得所述两个风扇中某一者调节压力,其余一者调节温度;4a)当所述蒸发器扇(fn_e)调节低压(lp)时,所述冷凝器扇(fn_c)调节过冷度(sc),所述膨胀阀(exv)及冷媒(填充)量调节手段(raam)中某一者调节高压(hp),其余一者控制过热度(sh)[情形(d)(d')];4b)当所述冷凝器扇(fn_c)调节高压(hp)时,所述蒸发器扇(fn_e)调节过热度(sh),所述膨胀阀(exv)及冷媒(填充)量调节手段(raam)中某一者调节低压(lp),其余一者控制过冷度(sc)[情形(e)(e')];5)参照负载来控制所述压缩机(c),使得单位时间压缩既定冷媒(g/s);随着时间从0时到24时,如果负载缓慢变化,则所述热泵消耗的电力也以与负载类似的形态缓慢变化。
[0024]
此时,优选所述冷媒(填充)量调节手段(raam)包括存储冷媒的存储空间(rs)、从所述回路向所述冷媒存储空间(rs)回收冷媒的回收阀门(vvd)、从所述冷媒存储空间(rs)向所述回路填充冷媒的填充阀门(vvc);冷媒填充回收手段(rcrm)与所述膨胀阀(exv)并列安装;所述回收阀门(vvd)与冷凝器(hex_c)出口连接;所述填充阀门(vvc)与低压连接。
[0025]
另外,优选所述控制器224执行同时增大或同时减小所述回收阀门(vvd)与所述填充阀门(vvc)开度的控制,使得所述冷媒(填充)量调节手段(raam)兼具所述膨胀阀(exv)的作用。
[0026]
本发明的热泵包括可变容量压缩机(c)、冷凝器(hex_c)、膨胀阀(exv)及蒸发器(hex_e)的回路通过密闭的冷媒管线而连接,所述热泵包括冷凝器扇(fn_c)、蒸发器扇(fn_e)、向所述回路填充冷媒或从所述回路回收冷媒的冷媒(填充)量调节手段(raam)及控制器224,其特征在于,所述控制器224使用在计算制冷期间能量消耗效率(以下称为“cspf”)的温度范围内以曲线补正的目标冷凝温度(hp_t)及目标蒸发温度(lp_t);所述曲线在图12样式的性能系数表中显示于外部气体温度低的一侧;在所述表中,所述曲线(“外部气体低的一侧的蒸发温度曲线补正”)显示于连接第一地点(cspf计算所使用的外部气体最大温度中的目标蒸发温度)与第二地点(cspf计算所使用的外部气体最小温度中的目标蒸发温度)的直线的右侧。
[0027]
发明的效果
[0028]
根据本发明的热泵控制方法,提供一种热泵,针对以多负载条件来测量效率的热泵,在各负载条件下设置目标高压与目标低压,使得最优先达成所述目标压力。另外,具有的效果是提供一种热泵,不利用耗电大的压缩机达成目标压力,从而改善效率。
附图说明
[0029]
图1是以往技术的p
‑
h线图的一个示例。
[0030]
图2是帮助理解本发明第一控制至第四控制的图。
[0031]
图3是本发明的p
‑
h线图的一个示例。
[0032]
图4是本发明的控制顺序的一个示例。
[0033]
图5是罗列本发明的控制顺序种类的一个示例。
[0034]
图6是适合于本发明的热泵回路的一个示例。
[0035]
图7是适合于本发明的热泵回路的又一示例。
[0036]
图8是适合于本发明的热泵回路的又一示例。
[0037]
图9是适合于本发明的热泵回路的又一示例。
[0038]
图10是将适合于本发明的主要部件的作用整理成表。
[0039]
图11是计算本发明优选的cspf的示例。
[0040]
图12是计算本发明优选的cspf的又一示例。
具体实施方式
[0041]
下面参照附图,详细说明本发明优选实施例。此时需要注意的是,附图中相同的构成要素尽可能用相同标记代表。在本说明书中,只要在语句中未特别提及,单数型也包括复数型。说明书中使用的“包括(comprises)”及/或“包括的(comprising)”不排除提及的构成要素、步骤及/或动作存在或添加一个以上的其他构成要素、步骤及/或动作。
[0042]
另外,下面说明的本说明书及权利要求书中使用的术语或词语不得限定解释为通常的或词典的意义,只应解释为符合本发明技术思想的意义或概念。而且,省略对判断认为可能不必要地混淆本发明要旨的公知构成及功能的详细说明。
[0043]
在以下说明中,出于便利,只要未特别提及,则使用理想的热泵进行说明。此时,控制器控制热泵的部件,调节各部件的性能。在以下说明中,如果有“调节”、“控制”、“控制的”等叙述,那么即使未独立地提及控制器,也意味着“控制器提供控制值而使得实现所述叙
述”。另外,控制器执行的“控制”既可以为某种“作用”,也可以为某种“顺序”。在本说明书中,只要未特别提及,“控制”应解释为“作用”。另外需注意,在本说明书中,术语“压力”可以解释为“冷媒在所述压力下沸腾的温度,即冷凝温度或蒸发温度”。
[0044]
<主要概念说明>
[0045]
热交换器可以通过q=c
·
m
·
dt计算热交换量。其中,使q相同的m与dt的组合很多。在上式中,m(例如,热交换物质为空气时)可以解释为空气量、空气重量、风速、热交换器风扇速度、风扇耗电等。此时,c成为空气比热或比例系数。而且,温度差dt(穿过热交换器前空气温度
‑
穿过后空气温度)会根据冷媒在热交换器内部沸腾的温度与流入空气的温度差而变化。在本发明中,减小所述dt的控制可以意味着“减小冷媒在热交换器内部沸腾的温度与要同热交换器进行热交换的物质(例如空气)的温度差的控制”。
[0046]
如果更详细地说明,如果热交换器温度(冷媒在热交换器内部沸腾的温度)与空气温度相同,则不发生热交换。因此,减小所述温度差dt的方法之一是减小流入热交换器的空气温度与冷媒在热交换器内部沸腾的温度(以下称为“热交换器温度”)之差。为此,需调节热交换器内部压力。
[0047]
一般而言,压缩机的耗电远远大于风扇的耗电,因而在所述温度差dt大于既定值以上的情况下,如果增加m、减小dt而达成目标热交换量(q=c
·
m
·
dt),则整体耗电减少,热泵效率得到改善。
[0048]
<要素技术说明>
[0049]
下面参照图1及图2进行说明。
[0050]
说明向热泵系统注入冷媒。热泵配管安装完成后,先用真空泵将所述配管内部形成真空。而且,连接外部(在电子秤上的)冷媒桶与低压管线,启动压缩机。如果打开外部冷媒桶的阀门,则冷媒从外部冷媒桶填充到热泵内部。如果填充所设置重量的冷媒,则锁死外部冷媒桶的阀门。于是,在热泵中适宜地形成高压与低压。例如如第一制冷周期(81)
‑
(82)
‑
(83)
‑
(84)所示。从中可知,如果填充冷媒(以下称为“第一控制”),则高压(hp)与低压(lp)均增加(从真空到低压、从真空到高压)(1)。相反可知,如果回收冷媒(以下称为“第二控制”),则高压(hp)与低压(lp)均减小(从低压到真空、从高压到真空)(2)。
[0051]
换言之,在适宜地形成高压与低压的制冷回路中,如果从外部向所述回路的低压追加填充冷媒,则所述追加的冷媒不是全部只在低压,而是一部分向高压移动(直至高压、低压稳定时为止)。从中可知,如果填充冷媒(即,如果进行第一控制),则高压(hp)与低压(lp)均增加(1)。相反可知,如果回收冷媒(即,如果进行第二控制),则高压(hp)与低压(lp)均减小(2)。
[0052]
在形成第一制冷周期(81)
‑
(82)
‑
(83)
‑
(84)的状态下,如果进行进一步关闭膨胀阀的操作(以下称为高压与低压之差增加的“第三控制”),则高压(hp)增加,低压(lp)减小(3),可以如第二制冷周期(91)
‑
(92)
‑
(93)
‑
(94)所示。所述第三控制也可以更快地驱动变频压缩机而实现。另外,在形成第二制冷周期(91)
‑
(92)
‑
(93)
‑
(94)的状态下,如果进行进一步打开膨胀阀的操作(下面称为高压与低压之差减小的“第四控制”),则高压(hp)减小,低压(lp)增加(4),可以如第一制冷周期(81)
‑
(82)
‑
(83)
‑
(84)所示。所述第四控制也可以以更低频率驱动变频压缩机而实现。此时,优选所述膨胀阀为电子式膨胀阀(eev)。
[0053]
如果进行第一控制1或第二控制2,则高压与低压均增加(uu)或均减小(dd)。如果
进行第三控制3或第四控制4,则如果高压增加(u),则低压减小(d),如果高压减小(d),则低压增加(u)。如果将两压力均向一侧移动的控制与向彼此相反侧移动的控制相组合,则可以在保持一侧压力的同时调节另一侧压力。
[0054]
例如,如果同时执行或(与顺序无关地)依次执行第一控制1与第三控制3[1+3],则高压会增加,低压会被抵消而不变动。另外,如果同时执行或(与顺序无关地)依次执行第一控制1与第四控制4[1+4],则低压会增加,高压会被抵消而不变动。另外,如果同时执行或(与顺序无关地)依次执行第二控制2与第三控制3[2+3],则低压会减小,高压会被抵消而不变动。另外,如果同时执行或(与顺序无关地)依次执行第二控制2与第四控制4[2+4],则高压会减小,低压会被抵消而不变动。此时,优选控制冷凝器扇及蒸发器扇,使得过冷度及过热度成为设计值。
[0055]
如果同时执行或(与顺序无关地)依次执行第三控制3与第四控制4[3+4],则可以在不变更高压与低压的同时,调节单位时间的冷媒循环量。更详细而言,如果在第三控制3中,进一步增加压缩机的单位时间的冷媒压缩量,进一步增加高压与低压之差,在第四控制4中,进一步打开膨胀阀,进一步减小高压与低压之差,则高压与低压不变,但单位时间的回路循环的冷媒量(gram/sec,以下称为“g/s”)会进一步增加。另一方面,如果变更第三控制与第四控制的控制对象,则回路循环的冷媒量当然会进一步减少。
[0056]
以上对在保持一侧压力的同时调节另一侧压力所需的要素技术进行了说明。需注意的是,在本说明书中,可以将高压解释为“高压下冷媒沸腾的温度”,即“冷凝温度”、将低压解释为“低压下冷媒沸腾的温度”,即“蒸发温度”。
[0057]
<实施例1>
[0058]
下面参考图2至图4,说明在本发明的热泵中控制使得进一步提高蒸发温度的一个实施例(空调制冷模式)。
[0059]
图4是控制使得进一步提高蒸发器的蒸发温度的顺序的示例。控制顺序100是连续进行2次第四控制4及第一控制1的示例。在初始状态(l0)下,控制器根据某种需要,将目标低压(lp_t)设置得比现在低压(lp_0)更高。于是,低压不同于目标值,为了使低压与目标值相同,控制器执行第四控制4。其结果,低压上升,高压下降,成为状态(l1)。虽然低压按希望上升,蒸发温度进一步提高,但高压下降,冷凝温度变得低于目标冷凝温度(hp_t)。其中,为了使高压与目标值(hp_t)相同,如果控制器执行第一控制1,则填充冷媒,高压及低压均上升,成为状态(l2)。即,低压的蒸发温度进一步上升,更接近目标蒸发温度(lp_t),高压保持目标冷凝温度(hp_t)。状态(l3)及状态(l4)图示了依次再反复一次所述第四控制4及第一控制1的情形。于是,低压沿着(lp_rise)上升而达到目标低压(lp_t)。
[0060]
如果从控制器角度说明控制顺序100,在初始状态(l0)下,控制器根据某种需要,将目标低压(lp_t)设置得比现在低压(lp_0)更高。控制器在初始状态(l0)下认知到低压(lp_0)低于目标值(lp_t),为了使低压与目标值(lp_t)相同,执行进一步开放膨胀阀的第四控制4。其结果,成为状态(l1)。在状态(l1)下,控制器认知到高压低于目标值,为了使高压与目标值(hp_t)相同,执行填充冷媒的第一控制1。从中可知,控制器的作用是如果低压脱离目标值,则调节膨胀阀,达成目标值,如果高压脱离目标值,则调节冷媒填充量,达成目标值。
[0061]
在图4中,控制顺序101与控制顺序100相同地使用第四控制4和第一控制1,但却是
先执行第一控制1的情形。在初始状态(l0a)下,控制器根据某种需要,将目标低压(lp_t)设置得比现在低压(lp_0)更高。于是,低压不同于目标值,为了使低压与目标值相同,控制器执行第一控制1。其结果,低压上升,高压下降,成为状态(l1a)。虽然低压按希望上升,蒸发温度进一步提高,但高压下降,冷凝温度变得高于目标冷凝温度(hp_t)。其中,为了使高压与目标值(hp_t)相同,如果控制器执行第四控制4,则高压下降,低压上升,成为状态(l2a)。即,低压的蒸发温度进一步上升,更接近目标蒸发温度(lp_t),高压保持目标冷凝温度(hp_t)。状态(l3a)及状态(l4a)图示了依次再反复一次所述第一控制1及第四控制4的情形。于是,低压沿着(lp_rise)上升而达到目标低压(lp_t)。
[0062]
如果从控制器角度说明控制顺序101,在初始状态(l0a)下,控制器根据某种需要,将目标低压(lp_t)设置得比现在低压(lp_0)更高。控制器在初始状态(l0a)下认知到低压(lp_0)低于目标值(lp_t),为了使低压与目标值(lp_t)相同,执行填充冷媒的第一控制1。其结果,成为状态(l1a)。在状态(l1a)下,控制器认知到高压高于目标值,为使高压与目标值(hp_t)相同,执行进一步开放膨胀阀的第四控制4。从中可知,控制器的作用是如果高压脱离目标值,则调节膨胀阀,达成目标值,如果低压脱离目标值,则调节冷媒填充量,达成目标值。
[0063]
如果简要比较控制顺序100及101,两者均将目标低压(lp_t)设置得比现在更高并达成所述目标。而且,两者均使用相同的第一控制1及第四控制4。但是,所述第一控制及第四控制的目标相互变更。所述第一控制填充冷媒,但用于在一侧达成目标高压,在另一侧达成目标低压。换言之,即使变更第一控制1与第四控制4的顺序,也可以获得相同的结果。为此,需相互更换各控制的目标。
[0064]
如控制顺序100及101所示,即使第一控制1与第四控制4顺序变更,也可以获得相同的效果。因此,在本发明中,控制顺序100如果广义地解释,当然包括控制顺序101。另外,在以下说明的各控制顺序150、200及250中,也应广义地解释。
[0065]
在图5中,控制顺序200是连续2次进行第一控制1及第三控制3的示例。在初始状态(h0)下,控制器根据某种需要,将目标高压(hp_t)设置得比现在高压(hp_0)更高。于是,高压不同于目标值,为了使高压与目标值(hp_t)相同,控制器执行填充冷媒的第一控制1。其结果,高压及低压均上升,成为状态(h1)。高压按希望上升,冷凝温度变得更接近目标冷凝温度(hp_t)。但是,低压也上升,蒸发温度变得比目标蒸发温度(lp_t)更高。为了使低压与目标值(lp_t)相同,如果控制器通过膨胀阀执行第三控制3,则高压与低压之差进一步增大,高压上升,低压下降,成为状态(h2)。即,高压的冷凝温度进一步上升,更接近目标冷凝温度(hp_t),低压保持目标蒸发温度(lp_t)。状态(h3)及状态(h4)图示了依次再反复1次所述第一控制1及第三控制3。于是,高压沿(hp_rise)上升,达到目标高压(hp_t)。
[0066]
如果从控制器角度说明控制顺序200,在初始状态(h0)下,控制器根据某种需要,将目标高压(hp_t)设置得比现在高压(hp_0)更高。于是,高压不同于目标值,为使高压与目标值(hp_t)相同,控制器执行填充冷媒的第一控制1。其结果,成为状态(h1)。在状态(h1)下,控制器认知到低压高于目标,为使低压与目标值(lp_t)相同,执行进一步关闭膨胀阀的第三控制3。从中可知,控制器的作用是如果高压脱离目标,则调节冷媒填充量,达成目标,如果低压脱离目标,则调节膨胀阀,达成目标。在控制顺序200中,如果相互变更第一控制1与第三控制3的顺序,则控制器当然需通过冷媒填充量来调节低压,通过膨胀阀来调节高
压。
[0067]
在图5中,控制顺序150是连续2次进行第三控制3及第二控制2的示例。在初始状态(l5)下,控制器根据某种需要,将目标低压(lp_t)设置得比现在低压(lp_0)更低。于是,低压不同于目标值,为使低压与目标值(lp_t)相同,控制器通过膨胀阀执行第三控制3。其结果,高压上升,低压下降,成为状态(l6)。低压按希望下降,蒸发温度变得更低,但高压上升,冷凝温度变得高于目标冷凝温度(hp_t)。为使高压与目标值(hp_t)相同,如果控制器执行第二控制2,则冷媒被回收,高压及低压均下降,成为状态(l7)。即,低压的蒸发温度进一步下降,更接近目标蒸发温度(lp_t),高压保持目标冷凝温度(hp_t)。状态(l8)及状态(l9)图示了依次再反复1次所述第三控制3及第二控制2的情形。于是,低压沿(lp_fall)下降,达到目标低压(lp_t)。
[0068]
如果从控制器角度说明控制顺序150,在初始状态(l5)下,控制器根据某种需要,将目标低压(lp_t)设置得比现在低压(lp_0)更低。控制器在初始状态(l5)下认知到低压(lp_0)高于目标(lp_t),为使低压与目标值(lp_t)相同,执行进一步关闭膨胀阀的第三控制3。其结果,成为状态(l6)。在状态(l6)下,控制器认知到高压高于目标,为使高压与目标值(hp_t)相同,执行回收冷媒的第二控制2。从中可知,控制器的作用是如果低压脱离目标,则调节膨胀阀,达成目标,如果高压脱离目标,则调节冷媒填充量,达成目标。另一方面,在控制顺序150中,如果相互变更第二控制2及第三控制3的顺序,则控制器当然需通过冷媒填充量来调节低压,通过膨胀阀来调节高压。
[0069]
在图5中,控制顺序250是连续2次进行第二控制2及第四控制4的示例。在初始状态(h5)下,控制器根据某种需要,将目标高压(hp_t)设置得比现在高压(hp_0)更低。于是,高压不同于目标值,为使高压与目标值(hp_t)相同,控制器执行回收冷媒的第二控制2。其结果,高压及低压均下降,成为状态(h6)。高压按希望下降,冷凝温度更接近目标冷凝温度(hp_t)。但是,低压也下降,蒸发温度变得比目标蒸发温度(lp_t)更低。为使低压与目标值(lp_t)相同,如果控制器执行第四控制4,则高压与低压之差进一步减小,高压下降,低压上升,成为状态(h7)。即,高压的冷凝温度进一步下降,更接近目标冷凝温度(hp_t),低压保持目标蒸发温度(lp_t)。状态(h8)及状态(h9)图示了依次再反复1次所述第二控制2及第四控制4的情形。于是,高压沿(hp_fall)下降,达到目标高压(hp_t)。
[0070]
如果从控制器角度说明控制顺序250,在初始状态(h5)下,控制器根据某种需要,将目标高压(hp_t)设置得比现在高压(hp_0)更低。于是,高压不同于目标值,为使高压与目标值(hp_t)相同,控制器执行回收冷媒的第二控制2。其结果,成为状态(h6)。在状态(h6)下,控制器认知到低压低于目标,为使低压与目标值(lp_t)相同,执行进一步开放膨胀阀的第四控制4。从中可知,控制器的作用是如果低压脱离目标,则调节膨胀阀,达到目标,如果高压脱离目标,则调节冷媒填充量,达到目标。简言之,控制器通过膨胀阀来调节低压,通过冷媒填充量来调节高压。在控制顺序250中,如果相互变更第二控制2及第四控制4的顺序,则控制器当然需通过冷媒填充量来调节低压,通过膨胀阀来调节高压。
[0071]
以往的空调进行某种程度运转,在制冷负载减小(即,热交换要求量减小)的情况下(或外部气体温度降低而负载减小的情况下),室外机风扇(fn_ex)以最大速率以下旋转。此时,在冷凝器中的热交换温度差较大时,优选以本发明的控制顺序250,在保持蒸发温度的同时降低冷凝温度。于是,可以在将室外热交换器(hex_ex)的热交换量(q=c
·
m
·
dt)保
持在与负载大小对应的既定值的同时减小dt,增大m,减小空调的耗电。
[0072]
以往的空调进行某种程度运转,在制冷负载减小(即,热交换要求量减小)的情况下,室内机风扇(fn_in)以最大速率以下旋转。此时,在蒸发器中的热交换温度差较大时,优选以本发明的控制顺序100,在保持冷凝温度的同时提高蒸发温度。于是,可以在将室内热交换器(hex_in)的热交换量(q=c
·
m
·
dt)保持在负载大小的同时减小dt,增大m,减小空调的耗电。
[0073]
其中,所谓增大m,可以解释为“进一步提高风扇的旋转速度”或“进一步增大单位时间移送的空气重量”。而且,所谓减小dt,实际上包括减小压缩机的耗电(例如降低变频压缩机的驱动频率)、不独立地控制压缩机[控制顺序250的结果或控制顺序100的结果]而减小高压与低压之差、降低压缩机耗电。
[0074]
在过冷度(sc)保持既定值的状态下,如果高压降低,则可利用单位重量的冷媒在蒸发器(hex_e)中交换的热量增加。如果更详细说明,如果在将(低压与)过冷度(sc)保持在既定值的同时降低高压,即如果执行控制顺序250,则在(p
‑
h线图)高压下,饱和液点与饱和蒸气点的距离变得更远。其结果,利用相同量的冷媒,在(室内/室外)热交换器中可以进行更多的热交换。此时,假如(制冷或制热)所需的热交换要求量不变,则1)可以减小单位时间的冷媒循环量(g/s)(例如降低变频压缩机驱动频率),减小压缩机消耗的电力。而且,2)压缩机两端的压力差减小,可以减小压缩机消耗的电力。
[0075]
另外,如果在过热度(sh)保持在既定值的状态下升高低压,则在低压下,冷媒密度升高,单位时间的冷媒循环量(g/s)增加,可以在(室内/室外)热交换器中交换的热量增加。此时,假如(制冷或制冷)所需的热交换要求量不变,则1)可以减小单位时间的冷媒循环量(g/s)(例如降低变频压缩机驱动频率),减小压缩机消耗的电力,另外,2)压缩机两端的压力差减小,可以减小压缩机消耗的电力。
[0076]
因此,在负载小于额定、dt大于既定值的情况下,如果执行控制顺序100及/或250,则热泵的效率得到改善。当然,可以通过多次先行实验,求出在多种条件(例如外部气体温度、设置温度、室内气体温度等)下优选的目标高压(hp_t)及目标低压(lp_t)。
[0077]
本发明的热泵控制概念当然也可以适用于制冷。因此,本说明书中说明的制冷模式的“目标蒸发温度”优选解释为“室内热交换器(hex_in)的热交换温度”。而且,“目标冷凝温度”优选解释为“室外热交换器(hex_ex)热交换温度”。
[0078]
<实施例2>
[0079]
下面参照图6,说明适合于本发明的热泵600的一个示例。
[0080]
热泵600包括压缩机(c)、冷凝器(hex_c)、膨胀阀(exv)及蒸发器(hex_e)的“回路”通过密闭的冷媒管线而连接。而且,冷媒存储罐(rs1)与所述膨胀阀(exv)并列安装。在所述膨胀阀(exv)入口与所述罐(rs1)入口之间安装有在“回路”中回收冷媒的回收阀门(vvd)。而且,在所述膨胀阀(exv)出口与所述罐(rs1)出口之间,安装有向“回路”填充冷媒的填充阀门(vvc)。下面将所述冷媒存储罐(rs1)、所述回收阀门(vvd)及所述填充阀门(vvc)捆绑称为“冷媒(填充)量调节手段(raam)”。
[0081]
下面说明在安装热泵600时填充冷媒的一个示例。首先,安装热泵600配管后,打开阀门(exv)(vvd)(vvc),利用外部真空泵,将“回路”与冷媒存储罐(rs1)内部形成真空状态。而且,将回收阀门(vvd)和填充阀门(vvc)完全关闭。将热泵600外部冷媒桶连接于所述“回
路”,启动压缩机(c)。而且,如果打开外部冷媒桶阀门,则冷媒从外部冷媒桶填充到热泵600。填充了设计量的冷媒后,将外部冷媒桶阀门完全锁死。
[0082]
下面对在热泵600“回路”中回收冷媒并存储于冷媒存储罐(rs1)的第二控制2进行说明。如果打开冷媒回收阀门(vvd),则由于“回路”的高压高、存储罐(rs1)内部为真空,因而已冷凝的冷媒在从“回路”向存储罐(rs1)回收的同时膨胀。如果既定量的冷媒回收到存储罐(rs1)(高压与存储罐内部的压力相同),则无法进一步回收冷媒。此时,如果稍稍打开连接于低压的冷媒填充阀门(vvc),排出存储罐(rs1)内部的膨胀的冷媒,则存储罐(rs1)内部压力下降,因而冷凝的冷媒继续回收。
[0083]
下面对向热泵600的“回路”填充冷媒的第一控制1进行说明。在回收阀门(vvd)关闭状态下,如果打开填充阀门(vvc),则借助于压缩机的吸入力,冷媒存储罐(rs1)内部的冷媒进行移动而填充到“回路”。最终,冷媒填充到“回路”,直至低压管线的压力与冷媒存储罐(rs1)内部压力相同时为止。
[0084]
在本实施例中,对第三控制3及第四控制4的说明已经在本发明的要素技术说明中详细说明,因而省略。通过以上说明,作为本发明要素技术的第一控制1至第四控制4在热泵600中可以应用。
[0085]
图7的热泵700示例性图示了冷媒填充阀门(vvc)安装于存储罐(rs2)与压缩机(c)入口之间的情形。
[0086]
图8的热泵800是在图6的热泵600中去除膨胀阀(exv),变更得可以将冷媒存储罐(rs1)变更为可气液分离的存储罐(rs3),将所述气液分离器(rs3)内部的气体注入(更广义的术语是“供应”)到压缩机(c)。此时,执行同时增加或同时减小所述回收阀门(e_vvd)与所述填充阀门(e_vvc)开度的控制,执行膨胀阀(exv)功能。填充及回收冷媒可以利用与热泵600相同的原理实现,因而省略详细说明。
[0087]
图6至图8的冷媒(填充)量调节手段(raam)应解释为与膨胀阀(exv)并列安装。
[0088]
<实施例3>
[0089]
下面参照图6,说明适合于本发明的热泵600制冷模式控制方法一个示例。热泵600的回路构成已在前面说明,因而省略。在本发明中,控制器224优选包括如下第一作用至第七作用。
[0090]
1)可变容量压缩机控制:控制器224控制使得压缩机(c)每单位时间压缩(g/s)已设置的冷媒量。所述压缩量(g/s)可以参照制冷负载来计算。当是变频压缩机(c)时,以与负载对应地设置的频率运转。假如低压及过热度(sc)保持既定,则在该条件下,冷媒的密度既定,因而所述压缩机(c)每单位时间压缩的冷媒量(g/s)按驱动频率而计算(以下称为“单位时间的冷媒压缩量控制”)。在本发明中,当然可以使用压缩行程距离可变的压缩机。
[0091]
2)冷凝器扇速度控制:控制器224控制冷凝器扇(fn_c)的速度,使得在冷凝器(hex_c)出口测量的冷媒的过冷度(sc)成为目标过冷度(sc_t)。(以下称为“通过冷凝器扇的过冷度控制”)
[0092]
3)蒸发器扇速度控制:控制器224控制蒸发器扇(fn_e)的速度,使得在蒸发器(hex_e)出口测量的冷媒的过热度(sh)成为目标过热度(sh_t)。(以下称为“通过蒸发器扇的过热度控制”)
[0093]
4)膨胀阀开度控制:如果将膨胀阀(eev)比现在进一步打开,则高压下降,低压上
升。相反,如果将膨胀阀(eev)比现在进一步关闭,则高压上升,低压下降。在本发明中,控制器224控制膨胀阀(exv),使得两压力中的一侧压力成为目标压力。下面,将控制器224通过膨胀阀来调节低压作为最优先达成目标的情形称为“通过膨胀阀的低压控制”。而且,将调节高压作为最优先达成目标的情形称为“通过膨胀阀的高压控制”。为此,所述膨胀阀(exv)优选为电子式膨胀阀(eev)。
[0094]
5)冷媒(填充)量调节手段(raam)控制:如果将冷媒填充于回路,则高压与低压均上升,如果回收冷媒,则高压与低压均下降。在本发明中,控制器224控制冷媒(填充量)调节手段,使得两压力中的一侧压力成为目标压力。下面,控制器通过冷媒(填充量)调节手段来调节高压作为最优先达成目标的情形称为“通过冷媒(填充)量调节手段(raam)的高压控制”。而且,将调节低压作为最优先达成目标的情形称为“通过冷媒(填充)量调节手段(raam)的低压控制”。
[0095]
6)目标冷凝温度设置:控制器224优选如公式1所示,参照外部气体温度(ta),将目标冷凝温度(hp_t)设置得比外部气体温度高出既定的值(c1)。
[0096]
tc=ta+c1
‑‑‑‑‑
(式1)
[0097]
例)c1=10.0,与负载大小无关,tc=ta+10.0
[0098]
而且,也优选如公式2所示,参照外部气体温度及负载大小来设置。
[0099]
tc=ta+c1+c2 x qc/qc_max
‑‑‑‑‑
(式2)
[0100]
例)c1=10.0、c2=1.0,额定冷凝负载(qc_max)=10.0kw,
[0101]
如果冷凝负载(qc)=2kw,则tc=ta+10.2℃,
[0102]
如果冷凝负载(qc)=4kw,则tc=ta+10.4℃
[0103]
7)目标蒸发温度设置:控制器224优选如公式3所示,参照内定气体温度(tin),将目标蒸发温度设置得比内定气体温度低既定的值(e1)。
[0104]
te=tin
‑
e1
‑‑‑‑‑
(式3)
[0105]
例)e1=15.0,与负载大小无关,te=tin
‑
15.0
[0106]
而且,也优选如公式4所示,参照内气温度(tin)及负载大小来设置。
[0107]
te=tin
‑
(e1+e2 x qe/qe_max)
‑‑‑‑‑
(式4)
[0108]
例)e1=10.0、e2=10.0,额定蒸发负载(qe_max)=10.0kw
[0109]
如果蒸发负载(qe)=3kw,则te=tin
‑
13.0℃
[0110]
如果蒸发负载(qe)=9kw,则te=tin
‑
19.0℃
[0111]
另一方面,当然可以在多样的环境(例如外部气体温度、内定气体温度、湿度、设置温度等)下,通过多次先行实验,求出目标冷凝温度(hp_t)及目标蒸发温度(lp_t),控制器224当然可以使用所述求出的值。而且,控制器当然可以根据负载的变动而随时或按既定控制周期来设置所述目标值(hp_t)(lp_t)。
[0112]
下面参照图5的控制顺序100,对要提高低压时(高压保持不变)的优选控制顺序进行说明。由于要比现在[初始状态(l0)]提高低压,因而控制器224将目标低压(lp_t)设置得比现在(lp_0)更高。于是,由于现在低压(lp_0)与目标低压(lp_t)不同,因而为使低压与目标值(lp_t)相同,“通过膨胀阀的低压控制”运转,进行将膨胀阀比现在进一步开放的第四控制4。通过所述第四控制4,高压下降,低压上升,状态从(l0)变为(l1)。通过所述第四控制4,高压脱离目标值(hp_t)。于是,为了保持目标高压(hp_t),“通过冷媒(填充)量调节手段
(raam)的高压控制”运转,进行向回路填充冷媒的第一控制1。通过所述第一控制1,高压及低压均上升,状态从(l1)变为(l2)。其结果,高压保持为与初始状态(l0)相同的值,低压更接近目标低压(lp_t)。状态(l3)及状态(l4)图示了依次再反复1次所述第四控制4及第一控制1的情形。
[0113]
下面参照图5的控制顺序150,对要降低低压时(高压保持不变)时的优选控制顺序进行说明。由于要比现在[初始状态(l5)]降低低压,因而控制器224将目标低压(lp_t)设置得比现在(lp_0)更低。于是,由于现在低压(lp_0)与目标低压(lp_t)不同,因而为使低压与目标值(lp_t)相同,“通过膨胀阀的低压控制”运转,进行将膨胀阀比现在进一步关闭的第三控制3。通过所述第三控制3,高压上升,低压下降,状态从(l5)变为(l6)。通过所述第三控制3,高压脱离目标值(hp_t)。于是,为了保持目标高压(hp_t),“通过冷媒(填充)量调节手段(raam)的高压控制”运转,进行在回路中回收冷媒的第二控制2。通过所述第二控制2,高压及低压均下降,状态从(l6)变为(l7)。其结果,高压保持为与初始状态(l5)相同的值,低压进一步接近目标低压(lp_t)。状态(l8)及状态(l9)图示了依次再反复1次所述第三控制3及第二控制2的情形。
[0114]
控制顺序200及250可以在与前面叙述的控制顺序100及150类似的框架下进行说明,因而省略详细说明。
[0115]
下面参照图4的控制顺序101,对在要提高低压时(高压保持不变)的优选控制顺序进行说明。由于要比现在[初始状态(l0a)]提高低压,因而控制器224将目标低压(lp_t)设置得比现在(lp_0)更高。于是,由于现在低压(lp_0)与目标低压(lp_t)不同,因而为使低压与目标值(lp_t)相同,“通过冷媒(填充)量调节手段(raam)的低压控制”运转,进行填充冷媒的第一控制1。通过所述第一控制1,高压与低压均上升,状态从(l0a)变为(l1a)。通过所述第一控制1,高压脱离目标值(hp_t)。于是,为了保持目标高压(hp_t),为了保持目标高压(hp_t),“通过膨胀阀的高压控制”运转,进行进一步开放膨胀阀的第四控制4。通过所述第四控制4,高压下降,低压上升,状态从(l1a)变为(l2a)。其结果,高压保持为与初始状态(l0a)相同的值,低压更接近目标低压(lp_t)。状态(l3a)及状态(l4a)图示了依次再反复1次所述第四控制4及第一控制1的情形。
[0116]
如果从广义上解释本实施例中说明的控制顺序100,应解释为包括控制顺序101。更详细而言,控制顺序100及101均使用填充冷媒的第一控制1与进一步关闭膨胀阀的第四控制4。通过填充冷媒的控制,在控制顺序100中调节了低压,在控制顺序101中调节了高压。而且,通过进一步关闭膨胀阀的控制,在控制顺序100中调节了低压,在控制顺序101中调节了高压。简言之,即使变更第一控制1与第四控制4的顺序,也可以获得相同的结果。为此,需相互变更第一控制1与第四控制4的目标。
[0117]
<实施例4>
[0118]
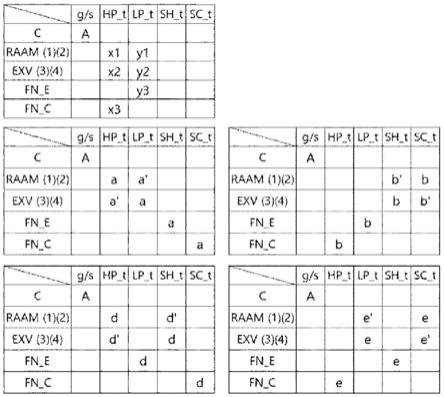
参照图9,说明本发明热泵的制冷模式下控制器224对主要部件的优选作用。本发明的控制顺序100至250可以通过图9中的情形(a)来体现。如果更详细说明,控制器224可以执行以下第一至第七作用,运行控制顺序100至250。
[0119]
1)目标冷凝温度(hp_t)设置:控制器224发挥的作用是参照外部气体温度、负载等,设置冷媒在室外热交换器(冷凝器)内部沸腾的目标温度(目标冷凝温度)。随着时间从早晨到中午,在外部气体温度及负载缓慢上升的情况下,可以将目标冷凝温度(hp_t)缓慢
设置得比现在(hp)更高。
[0120]
2)目标蒸发温度(lp_t)设置:控制器224发挥的作用是参照内定气体温度、设置温度等,设置冷媒在室内热交换器(蒸发器)内部沸腾的目标温度(目标蒸发温度)。当内定气体温度与设置温度的差异小时,而且当现在的蒸发器扇(fn_e)速度为设计额定以下时,可以将目标蒸发温度(lp_t)设置得比现在更高。
[0121]
3)冷媒压缩量控制:控制器224发挥的作用是控制可变容量压缩机(c)而使得单位时间压缩设置的既定冷媒量(g/s)。例如假如低压及过热度(sc)保持既定值,则在该条件下,由于冷媒的密度既定,因而所述压缩机(c)单位时间压缩的冷媒量(g/s)按压缩机驱动频率计算[图9中的(a)]。
[0122]
4)过热度控制:控制器224发挥的作用是控制蒸发器扇(fn_e)速度而使得过热度(sh)成为目标过热度(sh_t)[图9中(sh_t)与(fn_e)交叉点(a)]。
[0123]
5)过冷度控制:控制器224控制冷凝器扇(fn_c)速度而使得过冷度(sc)成为目标过冷度(sc_t)[图9中(sc_t)与(fn_c)交叉点(a)]。
[0124]
6)低压控制:控制器224发挥的作用是控制膨胀阀(exv)而使得低压(lp)成为目标压力(lp_t)。更详细而言,如果调节膨胀阀,则高压与低压一同变更。此时,控制器发挥控制使得低压成为目标值的“通过膨胀阀的低压控制”作用[图9中(lp_t)与(exv)交叉点(a)]。
[0125]
7)高压控制:控制器224发挥的作用是控制冷媒(填充)量调节手段(raam)而使得高压(hp)成为目标压力(hp_t)。如果填充或回收冷媒,则高压与低压同时上升或下降。此时,控制器发挥控制使得高压成为目标值的“通过冷媒(填充)量调节手段(raam)的高压控制”作用[图9中(hp_t)与(raam)交叉点(a)]。
[0126]
在控制器224执行所述第一至第七作用方面,没有特别要求的顺序。作为极端的示例,向各部件各分别一个控制器,各控制器具有独立的目标,为了达成其目标而执行控制即可。
[0127]
另一方面,为了执行图5的控制顺序100至250,现在压力与目标压力需不同,因而设置目标压力的所述第一或第二作用需先于其他作用而运行。例如,控制顺序100将目标蒸发温度(lp_t)设置得比现在更高(第二作用)。于是,低压不同于目标值,因而“通过膨胀阀的低压控制”自动运转(第六作用)。而且,通过所述第六作用,高压变更,“通过冷媒(填充)量调节手段(raam)的高压控制”自动运转(第七作用)。
[0128]
控制顺序150象控制顺序100一样,以所述第二、第六及第七作用体现。只是在所述第二作用中,将目标蒸发温度(lp_t)设置得比现在更低,这与控制顺序100不同。
[0129]
控制顺序200及250首先执行设置目标冷凝温度的第一作用。于是,高压不同于目标值,因而“通过冷媒(填充)量调节手段(raam)的高压控制”自动运转(第七作用)。而且,通过所述第七作用,低压变更,“通过膨胀阀的低压控制”自动运转(第六作用)。
[0130]
以上说明了如果设置目标高压或目标低压,则低压控制(第六作用)及高压控制(第七作用)自动运转,执行本发明的控制顺序100至250。
[0131]
在实施例1及实施例3中,说明了变更膨胀阀(exv)与冷媒(填充)量调节手段(raam)的控制目标的控制顺序101和101获得相同结果的情形。如果将此应用于图9的情形(a),则成为情形(a')。更详细而言,如果控制器通过冷媒(填充)量调节手段(raam)调节低压[图9中(lp_t)与(raam)交叉点(a')],通过膨胀阀调节高压[图9中(hp_t)与(exv)交叉点
(a'),以下简称为“图9中”],则成为情形(a')。
[0132]
在以下说明的图9的情形(b)至(e)中,第一至第三作用与情形(a)相同,第四至第七作用不同。
[0133]
图9情形(b)及(b')图示了通过风扇速度来控制所有压力(高压、低压),通过膨胀阀与冷媒(填充)量调节手段控制过热度和过冷度的情形。更详细而言,控制冷凝器扇(fn_c)速度,调节高压(hp)[(hp_t)与(fn_c)交叉点(b)],控制蒸发器扇(fn_e)速度,调节低压(lp)[(lp_t)与(fn_e)交叉点(b)]。而且,如果通过膨胀阀(exv)调节过热度(sh)[(sh_t)与(exv)交叉点(b)]、通过冷媒(填充)量调节手段(raam)调节过冷度(sc)[(sc_t)与(raam)交叉点(b)],则成为情形(b)。
[0134]
在实施例1及实施例3中,说明了变更膨胀阀(exv)与冷媒(填充)量调节手段(raam)的控制目标的控制顺序101和101获得相同结果的情形。如果将其应用于图9的情形(b),则成为情形(b')。更详细而言,在情形(b)中,如果相互变更膨胀阀(exv)与冷媒(填充)量调节手段(raam)的控制目标,则成为情形(b')。如果通过冷媒(填充)量调节手段(raam)来调节过热度(sh)[(sh_t)与(raam)交叉点(b')],通过膨胀阀(exv)来调节过冷度(sc)[(sc_t)与(exv)交叉点(b')],则成为情形(b')。
[0135]
所述情形(a)、(a')、(b)及(b')的风扇(蒸发器扇、冷凝器扇)均控制压力(高压、低压),或均调节温度(过热度、过冷度)。
[0136]
下面,控制器224发挥控制冷媒(填充)量调节手段(raam)而使得高压(hp)成为目标高压(hp_t)的作用时,称为x1,控制器224发挥控制膨胀阀(exv)的作用时,称为x2,控制器224发挥控制冷凝器扇(fn_c)速度的作用时,称为x3。
[0137]
而且,控制器224发挥控制冷媒(填充)量调节手段(raam)而使得低压(lp)成为目标低压(lp_t)的作用时,称为y1,控制器224发挥控制膨胀阀(exv)的作用时,称为y2,控制器224发挥控制蒸发器扇(fn_e)速度的作用时,称为y3。
[0138]
如果将调节所述高压的x1至x3与调节低压的y1至y3相组合,则可以通过下述7组合,调节高压与低压。即,(x1,y2)(x1,y3)(x2,y1)(x2,y3)(x3,y1)(x3,y2)及(x3,y3)。从中可知,情形a为(x1,y2)组合,情形a'为(x2,y1)组合,情形b为(x3、y3)组合。
[0139]
另一方面,图9的情形(d)及(e)是两个风扇(蒸发器扇、冷凝器扇)中的一个控制压力,其余一者控制过热度或过冷度中某一者的温度的情形。
[0140]
更详细而言,情形(d)通过(x1、y3)组合,控制蒸发器扇(fn_e)速度,调节低压(y3)[(lp_t)与(fn_e)交叉点(d)],控制膨胀阀(exv),调节过热度(sh)[(sh_t)与(exv)交叉点(d)]。控制冷媒(填充)量调节手段(raam),调节高压(hp)[(hp_t)与(raam)交叉点(d)]。而且,控制冷凝器扇(fn_c)速度,调节过冷度(sc)[(sc_t)与(fn_c)交叉点(d)]。
[0141]
在情形(d)中,如果相互变更膨胀阀(exv)与冷媒(填充)量调节手段(raam)的控制目标,则成为情形(d')。更详细而言,控制膨胀阀(exv),调节高压(hp)[(hp_t)与(exv)交叉点(d')],控制冷媒(填充)量调节手段(raam),调节过热度(sh)[(sh_t)与(raam)交叉点(d')]。作为一个示例,如果过热度高于目标,则通过所述手段填充冷媒,达成目标过热度(sh_t)。其中,可知情形(d')为(x2,y3)组合。
[0142]
情形(e)为(x3、y2)组合,控制冷凝器扇(fn_c)速度,调节高压(hp)[(hp_t)与(fn_c)交叉点(e)],控制蒸发器扇(fn_e)速度,调节过热度(sh)[(sh_t)与(fn_e)交叉点(e)]。
控制膨胀阀(exv),调节低压(lp)[(lp_t)与(exv)交叉点(e)]。而且,控制冷媒(填充)量调节手段(raam),调节过冷度(sc)[(sc_t)与(raam)交叉点(e)]。
[0143]
在情形(e)中,如果相互变更膨胀阀(exv)与冷媒(填充)量调节手段(raam)的控制目标,则成为情形(e')。更详细而言,控制膨胀阀(exv),调节过冷度(sc)[(sc_t)与(exv)交叉点(e')],控制冷媒(填充)量调节手段(raam),调节低压(lp)[(lp_t)与(raam)交叉点(e')]。从中可知情形(e')为(x3,y1)组合。
[0144]
<工业效果>
[0145]
下面参考图10,简单说明本发明的优点。图10引用了本说明书中提及的(非专利文献)现有技术,是启动变频空调24小时期间测量的结果。
[0146]
在图10中,室内负载(idld)用四边形表示,外部气体温度(odt)用圆形表示,室内温度(idt)用点表示。而且,耗电(pd)用实线表示。室内温度(idt)适宜地控制在大致26℃至28℃之间。随着时间从0时到24时,外部气体温度(odt)和室内负载(idld)缓慢变化,其形态类似。
[0147]
测量的耗电(pd)大致以1.5小时为周期反复起落。其起落幅也为1.5kw左右。这是因为以往技术(例如us2009/00137001及申请号kr10
‑
2016
‑
0072934)是通过热泵中耗电最多的压缩机来控制低压。如果通过耗电小的其他部件(例如膨胀阀)或手段(例如冷媒填充量调节手段)来达成目标压力,则所述耗电起落幅可以稳定于数瓦至数十瓦以内。其结果,热泵的耗电也以与室内负载(idld)类似的形态(pd2)缓慢变化。
[0148]
此时,优选压缩机与热交换要求量(idld)相符地控制。例如,如果压缩机入口压力及过热度控制为既定值,则压缩机入口的冷媒密度也固定为某种值。因此,如要单位时间压缩(g/s)符合热交换要求量(idld)的冷媒量,则控制变频压缩机频率即可。如图10所示,如果室内负载(idld)缓慢变化,则变频压缩机的频率也缓慢变化。而且,耗电(pd2)也以与室内负载类似的形态缓慢变化。
[0149]
通过本发明,可以消除以往热泵耗电(pd)中大致以1.5小时间隔出现的数kw的功率变动,从而可以降低发电站的预备功率。而且,能动地生成压力的压缩机驱动频率缓慢变化,因而高压及低压也缓慢变化,因此,控制程序得到简化。其结果,可以实现比以往更高水平的优化,预计将提高能量效率。
[0150]
<实施例5>
[0151]
下面说明在适合于本发明的热泵的制冷模式控制中设置目标冷凝温度(hp_t)及目标蒸发温度(lp_t)的一个示例。图11的左侧是将关于冷凝温度(tc)与蒸发温度(te)组合的性能系数(以下称为“cop”)制成表。而且,图11的右侧是使用所述cop来计算制冷期间能量消耗效率(以下称为
“”
)的一个示例。
[0152]
首先,在图11的cop表中,在(a)栏中按1℃间隔,从高值到低值记录了外部气体温度(ta)。在(b)栏中,记录了所述外部气体温度(ta)下的冷凝温度(tc)目标值。所述目标冷凝温度(hp_t)使用公式1,设置得比外部气体温度(ta)高10℃。在(d)栏中显示了蒸发温度(te)为8℃、冷凝温度使用(b)栏的值而计算的cop。(e)至(m)栏显示了以与(d)栏相同的方法计算的cop。在所述cop计算中,蒸发温度(te)为8℃至17℃之间的值,冷凝温度(tc)为(b)栏的值。
[0153]
下面对选定目标蒸发温度(lp_t)的方法进行说明。在图11的cop表中,划出了从冷
凝温度(tc)最高(53℃)、蒸发温度最低(8℃)的地点(以下称为“第一地点”)连接冷凝温度(tc)最低(25℃)、蒸发温度最高(17℃)的地点(以下称为“第二地点”)的直线。而且,将所述直线下方的(用斜体数字表示的)cop值记录于(r)栏,在计算cspf时使用。而且,将应用于所述直线下方的(用斜体数字表示的)cop的蒸发温度(te)记录于(c)栏。(c)栏的蒸发温度(te)为目标蒸发温度(lp_t)(以下称为“蒸发温度直线补正”)。
[0154]
下面对计算cspf的方法进行说明。在图11中,cspf计算使用(n)至(r)栏进行计算。在(n)栏中记录了外部气体温度(ta)。在(r)栏中记录了所述外部气体温度(ta)下的热泵的cop(图11中直线下方的斜体数字)。(o)至(q)栏填写了关于各地区外部气体温度的空调启动时间。(o)栏为印度,(p)栏为韩国,(q)栏为iso 16358值。如果使用所述栏的空调启动时间来计算cspf,则印度为6.33,韩国为6.98,iso 16358为7.60。
[0155]
在以上方法中,外部气体温度越低,目标蒸发温度设置得越高。这一般是外部气体温度越低,制冷负载会越低。此时,热交换量利用q=c
·
m
·
dt计算,由此,使得q满足负载。更详细而言,降低dt,减小热泵中耗电最多的压缩机耗电,提高m,使q与降低dt前相同。其中,所谓降低dt,提高冷媒蒸发温度(即,提高低压),减小与流入热交换器的空气的温度差即可。
[0156]
下面说明进一步改善cspf的方法。在图12的cop表中,在所述第二地点附近(即,蒸发温度17℃、冷凝温度25℃~31℃),将比连接所述两个地点的直线下方的cop更高值的cop选定为目标cop。而且,将计算所述目标cop的蒸发温度(te)当作目标蒸发温度(lp_t)。而且,将所述目标cop用于cspf计算。作为具体数值,例如,当外部气体温度(ta)为28℃时,所述直线下方的cop为6.50。在高于所述值的cop值中,选择(曲线下方的)7.14。而且,将计算所述cop的蒸发温度(te)15℃选定为目标蒸发温度(lp_t)。在所述第二地点附近的曲线中选择的cop,比在直线上选择的cop高,空调启动时间也相对较多,因而cspf比以前大幅改善(以下称为“外部气体低的一侧的蒸发温度曲线补正”)。
[0157]
如果将通过以上说明而选择的cop的一个示例以视觉方式表现,则可以如图12中用虚线表示的曲线所示进行示例。在图12中,如果使用所述曲线下方的(用斜体数字表示的)cop值来计算cspf,则比使用直线下方的cop值时有所改善。即,印度从6.33变为6.82,韩国从6.98变为7.68,iso 16358从7.60变为8.40,cspf得到改善。此时,所述“外部气体低的一侧的蒸发温度曲线补正”在图12表格中显示于(连接所述第一地点与第二地点的)直线右侧。
[0158]
在本实施例中,使用在(r)栏中显示的一组目标cop值,计算了多个地区的cspf。在实际体现中,可以使用按各地区优化的目标冷凝温度(hp_t)及目标蒸发温度(lp_t)来计算cspf。换言之,可以将用于按各地区计算cspf的外部气体最大温度与最小温度当作第一地点及第二地点来选定目标蒸发温度。因此,冷凝温度及蒸发温度的最小及最大值会因各地区而异。
[0159]
另一方面,当然也可以将本实施例的概念应用于从几个负载(例如100%、75%、50%及25%负载)求出各负载的性能系数,考虑各负载启动时间赋予加权值而计算的综合制冷效率(ieer)。
[0160]
以上说明了本发明的优选实施例。
[0161]
在本发明中,对以制冷模式运转热泵的情形进行了详细说明,但在制热模式下,当
然也可以使用本发明的概念。而且,虽然分别以一个压缩机、一个室外热交换器(hex_ex)及一个室内热交换器(hex_in)进行说明,但本发明可以以多个热交换器、多个压缩机来体现,这是从业人员不言而喻的。另外,当然也可以将发明的概念及控制方法应用于现有技术文献中举例的热泵回路。
[0162]
在本说明书中,说明了与空气进行热交换的情形,但也可以与液体进行热交换,这是从业人员不言而喻的。因此,在本发明中,空气需解释为包括水的“流体”。此时,向热交换器供应流体的风扇当然包括使液体在热交换器中流动的泵。
[0163]
以上针对本发明,考虑了其优选实施例,但这只不过是示例,只要是本技术领域的普通技术人员,便需理解可以由此导出多样的变形实施例。因此,本说明书和附图中公开的本发明实施例只用于容易地说明本发明的技术内容、帮助理解本发明而提出特定示例,并非要限定本发明的范围。
[0164]
[工业实用性]
[0165]
本发明的热泵可以在保持热交换量的同时使高压与低压差实现最小化,改善能量效率,因而工业实用性非常高。更详细而言,热泵中耗电最多的压缩机,如果压缩机入口压力与出口压力之差增大,则即使以相同频率启动,也耗电更多。根据本发明,将压缩机的入口压力与出口压力设置为最优先达成目标进行控制,提供比以往改善了效率的热泵,因而工业实用性很高。
[0166]
另外,通过本发明,可以消除以往热泵中大致按1.5小时间隔出现的数kw的功率变动,从而可以降低发电站的预备功率。而且,能动地生成压力的压缩机驱动频率缓慢变化,因而高压及低压也缓慢变化,因此控制程序简化。其结果,可以实现比以往更高水平的优化,提供比以往改善了效率的热泵,因而工业实用性很高。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1