一种大数据存储系统的制作方法
1.本发明涉及存储领域,更具体的说是一种大数据存储系统。
背景技术:
2.现有技术中的存放装置,如一种可分类存储物品的冷柜,包括箱壳和内胆,所述内胆内部设有多层食品筐存储结构,所述多层食品筐存储结构包括:食品筐,设有多个,用于分类存储物品;滑道,至少设置一对,连接在所述内胆内距离较近的两正对内壁上,每一对滑道上滑动架设多个所述食品筐;吊柱,设有多个,固定在所述内胆内壁上,用于卡装所述滑道。本实用新型通过设置多层食品筐结构将冷柜内部存储空间划分成多个小的存储单元,每个存储单元之间预留了间隙,可以有效的进行空气流通,并且方便物品分类存储、有效地防止食品串味,充分有效地利用了存储空间;该现有技术中的缺点是不能根据不同的重量自动将物体存放到不同的高度。
技术实现要素:
3.本发明的目的是提供一种大数据存储系统,可以根据不同的重量自动将物体存放到不同的高度。
4.本发明的目的通过以下技术方案来实现:
5.一种大数据存储系统,包括托起机构、提升机构、存放机构、扶正机构、拨动机构和控制机构;
6.托起机构包括托起底板、扶正轮、托起支架、托起筒和插钉,托起底板的左右两侧均转动连接有扶正轮,托起底板上固定连接有托起支架,托起支架固定连接有多个托起筒,每个托起筒的底部均滑动连接有插钉,插钉和托起筒之间固定连接有压缩弹簧ⅱ;
7.提升机构包括提升电机、提升卷筒、提升滑轨、提升滑块、提升弹簧ⅰ、滑动柱和插孔,提升电机的输出轴上固定连接有提升卷筒,提升卷筒上缠绕有钢丝绳,钢丝绳的两端分别固定连接在提升卷筒和提升滑块上,提升滑块滑动连接在提升滑轨上,提升滑轨上固定连接有多个提升弹簧ⅰ,每个提升弹簧ⅰ的下端均固定连接有滑动柱,每个滑动柱上均设置有插孔,每个插孔内均设置有电磁铁,提升弹簧ⅰ滑动连接在托起筒内,滑动柱滑动连接在托起筒上,插钉能够插入对应的插孔内;
8.存放机构包括存放支架、存放托盘和转动锟,存放支架上固定连接有多个存放托盘,每个存放托盘上均转动连接有多个转动锟,托起底板滑动连接在存放支架上,提升电机固定连接在存放支架上;
9.扶正机构包括伸缩机构和三角齿,伸缩机构的伸缩端固定连接有三角齿,伸缩机构固定连接在存放支架上;
10.拨动机构包括拨动轴、拨动板和传动轴,拨动轴设置有两个,两个拨动轴均转动连接在存放支架上,两个拨动轴之间通过传动轴传动连接,两个拨动轴上均固定连接有多个拨动板,其中一个拨动轴上设置有驱动拨动轴进行转动的动力机构ⅰ,动力机构ⅰ优选为伺
服电机;
11.控制机构包括控制支架、动力轴、缺齿齿轮、控制轴、控制凸轮和传感器,控制支架固定连接在存放支架上,控制支架上转动连接有动力轴,动力轴上设置有驱动动力轴进行转动的动力机构ⅱ,动力机构ⅱ优选为伺服电机,控制支架上转动连接有三个控制轴,动力轴上固定连接有缺齿齿轮,缺齿齿轮和三个控制轴啮合传动,三个控制轴上均固定连接有控制凸轮,控制支架上固定连接有三个传感器,三个控制凸轮分别能够和三个传感器接触,三个传感器分别和提升电机、伸缩机构和动力机构ⅰ连接。
附图说明
12.下面结合附图和具体实施方法对本发明做进一步详细的说明。
13.图1是本发明的大数据存储系统结构示意图;
14.图2是本发明的托起机构结构示意图;
15.图3是本发明的托起机构结构示意图;
16.图4是本发明的提升机构结构示意图;
17.图5是本发明的提升机构结构示意图;
18.图6是本发明的大数据存储系统结构示意图;
19.图7是本发明的存放机构结构示意图;
20.图8是本发明的存放机构和扶正机构连接结构示意图;
21.图9是本发明的拨动机构结构示意图;
22.图10是本发明的控制机构结构示意图;
23.图11是本发明的控制机构结构示意图。
24.图中:托起机构10;托起底板11;扶正轮12;托起支架13;托起筒14;插钉15;提升机构20;提升电机21;提升卷筒22;提升滑轨23;提升滑块24;提升弹簧ⅰ25;滑动柱26;插孔27;存放机构30;存放支架31;存放托盘32;转动锟33;扶正机构40;伸缩机构41;三角齿42;拨动机构50;拨动轴51;拨动板52;传动轴53;控制机构60;控制支架61;动力轴62;缺齿齿轮63;控制轴64;控制凸轮65;传感器66。
具体实施方式
25.下面结合附图对本发明作进一步详细说明。
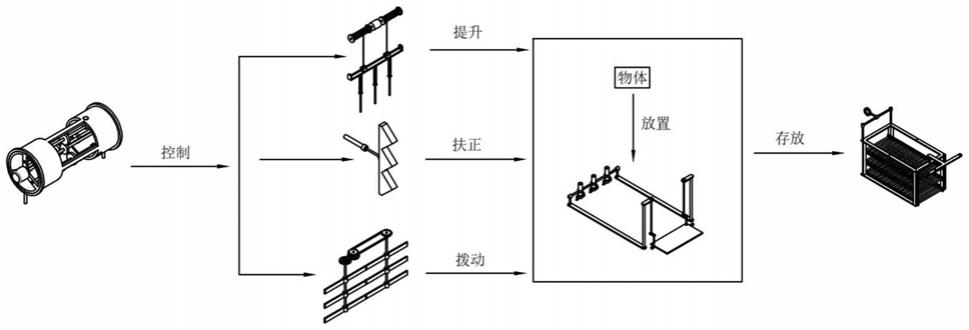
26.为了解决根据不同的重量自动将物体存放到不同的高度这一技术问题,下面对一种大数据存储系统的机构和功能进行详细的说明,一种大数据存储系统,包括托起机构10、提升机构20、存放机构30、扶正机构40、拨动机构50和控制机构60;
27.如图1和6所示,使用时,将需要进行存放的物体放置在托起机构10上,提升机构20和托起机构10之间通过提升弹簧ⅰ25连接,提升机构20提升指定的距离时,根据物体重量的不同,物体对提升弹簧ⅰ25的拉伸程度不同,进而物体会根据重量提升到不同的高度;
28.进一步的,为了使得物体可以顺利的放置在存放机构30内,设置有扶正机构40,扶正机构40对一个高度范围内的物体进行扶正,使得一个高度范围内的无图运动到一个高度;
29.进一步的,为了方便将物体推入存放机构30内,设置有拨动机构50,在扶正机构40
扶正完成后,拨动机构50启动,拨动机构50将物体推入存放机构30内;
30.进一步的,为了方便提升机构20、扶正机构40和拨动机构50可以按照一定顺序连续的工作,进而设置有控制机构60,控制机构60可以驱动提升机构20、扶正机构40和拨动机构50按照循序连续工作;
31.下面对托起机构10和提升机构20的结构和功能进行详细的说明,托起机构10包括托起底板11、扶正轮12、托起支架13、托起筒14和插钉15,托起底板11的左右两侧均转动连接有扶正轮12,托起底板11上固定连接有托起支架13,托起支架13固定连接有多个托起筒14,每个托起筒14的底部均滑动连接有插钉15,插钉15和托起筒14之间固定连接有压缩弹簧ⅱ;
32.提升机构20包括提升电机21、提升卷筒22、提升滑轨23、提升滑块24、提升弹簧ⅰ25、滑动柱26和插孔27,提升电机21的输出轴上固定连接有提升卷筒22,提升卷筒22上缠绕有钢丝绳,钢丝绳的两端分别固定连接在提升卷筒22和提升滑块24上,提升滑块24滑动连接在提升滑轨23上,提升滑轨23上固定连接有多个提升弹簧ⅰ25,每个提升弹簧ⅰ25的下端均固定连接有滑动柱26,每个滑动柱26上均设置有插孔27,每个插孔27内均设置有电磁铁,提升弹簧ⅰ25滑动连接在托起筒14内,滑动柱26滑动连接在托起筒14上,插钉15能够插入对应的插孔27内;
33.如图2至5所示,使用时,将需要进行分类存放的物体放置在托起底板11上,启动提升电机21,提升电机21的输出轴开始转动,提升电机21的输出轴带动提升卷筒22进行转动,提升卷筒22带动提升滑块24向上进行运动,提升滑块24带动提升滑轨23向上进行运动,提升滑轨23带动多个提升弹簧ⅰ25向上进行运动,预先启动插孔27内的电磁铁,电磁铁将对应的插钉15进行吸和,使得插钉15插入到插孔27内,进而当提升弹簧ⅰ25带动滑动柱26向上进行运动时,滑动柱26带动插钉15向上进行运动,插钉15带动托起筒14向上进行运动,托起筒14带动托起支架13向上进行运动,托起支架13带动托起底板11向上进行运动,由于托起底板11上物体的总量不同,进而提升弹簧ⅰ25被拉伸的长度不同,进而托起底板11会运动到一定的高度;
34.需要注意的是提升电机21的输出轴每次转动时,都转动指定的圈速,及在托起底板11上没有货物时,提升电机21每次会带动托起底板11运动到指定的高度,而托起底板11上每次的重量均不同,因此根据托起底板11上物体重量的不同会被提升到不同的高度,进而当托起底板11上的重量较重时,托起底板11向上运动的高度较低,当托起底板11上的重量较轻时,托起底板11向上运动的高度较高,进而按照重量将不同物体提升到不同的高度,使得不同重量的物体分别在存放机构30的不同高度上,使得较重的物体位于存放机构30的下端,不但可以对存放机构30起到一定的稳定作用,也减少取下物体时的做工;
35.进一步的,可以根据不同的使用需求,将插钉15插入到插孔27内,当插入有插钉15的滑动柱26可以带动托起筒14向上进行运动,没有插入插钉15的滑动柱26无法带动托起筒14向上进行运动,进而根据不同的使用需求调整滑动柱26和托起筒14之间的连接,进而调整当托起底板11向上进行运动时,提升弹簧ⅰ25被拉伸的数量,调整不同高度代表的重量区间,及提升弹簧ⅰ25的数量越多放置在存放机构30底部的物体越重,进而满足不同的使用需求;
36.下面对存放机构30的结构和功能进行详细的说明,存放机构30包括存放支架31、
存放托盘32和转动锟33,存放支架31上固定连接有多个存放托盘32,每个存放托盘32上均转动连接有多个转动锟33,托起底板11滑动连接在存放支架31上,提升电机21固定连接在存放支架31上;
37.如图7和8所示,存放支架31上固定连接的多个存放托盘32将存放支架31分隔成不同的存放区间,同时每个存放托盘32上均转动连接有多个转动锟33,减少在存在物体时,物体由于需要在存放托盘32上进行运动产生的摩擦力;
38.下面对扶正机构40的结构和功能进行详细的说明,扶正机构40包括伸缩机构41和三角齿42,伸缩机构41的伸缩端固定连接有三角齿42,伸缩机构41固定连接在存放支架31上;
39.如图8所示,当提升机构20将物体提升到一定的高度时,需要对托起底板11的高度进行定位,使得托起底板11和存放托盘32的高度相等,进而使得物体可以顺利的放置在存放托盘32内,进而设置有扶正机构40,当提升机构20将物体提升到一定的高度后,启动伸缩机构41,伸缩机构41可以是液压缸或者电动推杆,伸缩机构41的伸缩端带动三角齿42进行运动,三角齿42对扶正轮12进行挤压,如图8所示,三角齿42的凹处为存放托盘32的高度,进而三角齿42推动位于这个高度的托起底板11进行运动,使得托起底板11运动到和存放托盘32一样的高度;
40.下面对拨动机构50的结构和功能进行详细的说明,拨动机构50包括拨动轴51、拨动板52和传动轴53,拨动轴51设置有两个,两个拨动轴51均转动连接在存放支架31上,两个拨动轴51之间通过传动轴53传动连接,两个拨动轴51上均固定连接有多个拨动板52,其中一个拨动轴51上设置有驱动拨动轴51进行转动的动力机构ⅰ,动力机构ⅰ优选为伺服电机;
41.当托起底板11和存放托盘32处于同一高度后,启动动力机构ⅰ,动力机构ⅰ的输出轴开始转动,动力机构ⅰ的输出轴带动其中一个拨动轴51进行运动,拨动轴51通过传动轴53带动另一个拨动轴51进行转动,如图9所示,传动轴53在两个拨动轴51之间起到一个变向的作用,两个拨动轴51的转动方向相反,两个拨动轴51带动其上对应的多个拨动板52进行运动,拨动板52推动托起底板11上的物体进行运动,将物体推入存放机构30内,完成存放;
42.下面对控制机构60的结构和功能进行详细的说明,控制机构60包括控制支架61、动力轴62、缺齿齿轮63、控制轴64、控制凸轮65和传感器66,控制支架61固定连接在存放支架31上,控制支架61上转动连接有动力轴62,动力轴62上设置有驱动动力轴62进行转动的动力机构ⅱ,动力机构ⅱ优选为伺服电机,控制支架61上转动连接有三个控制轴64,动力轴62上固定连接有缺齿齿轮63,缺齿齿轮63和三个控制轴64啮合传动,三个控制轴64上均固定连接有控制凸轮65,控制支架61上固定连接有三个传感器66,三个控制凸轮65分别能够和三个传感器66接触,三个传感器66分别和提升电机21、伸缩机构41和动力机构ⅰ连接;
43.为了使得装置可以循环按照一定的顺序进行运动,进一步的设置有控制机构60,如图10和11所示,当将物体放置在托起底板11上后,启动动力机构ⅱ,当动力机构ⅱ的输出轴转动一圈,动力机构ⅱ的输出轴带动缺齿齿轮63转动一圈,缺齿齿轮63和三个控制轴64啮合传动,缺齿齿轮63转动一圈时,分别依次和三个控制轴64啮合传动,缺齿齿轮63转动一圈分别依次带动三个控制轴64转动一圈,三个控制轴64分别带动三个控制凸轮65依次转动一圈,三个控制凸轮65分别依次对三个传感器66进行挤压,传感器66可以是接触传感器或者挤压传感器,三个传感器66分别通过本领域惯用的电控手段和提升电机21、伸缩机构41
与动力机构ⅰ连接,进而在三个传感器66受到挤压时,提升电机21、伸缩机构41与动力机构ⅰ依次进行运动,这里需要注意的是,以动力机构ⅱ的输出轴转动两圈为一个完整的存放周期,动力机构ⅱ的输出轴转动第一圈时,提升电机21的传感器66受到挤压时,提升电机21的输出轴带动托起底板11向上进行运动,伸缩机构41的传感器66再受到挤压,伸缩机构41的伸缩端伸出对托起底板11进行定位,动力机构ⅰ的传感器66再受到挤压,动力机构ⅰ的输出轴转动一圈,拨动板52将物体推入,动力机构ⅱ的输出轴转动第二圈时,提升电机21的传感器66受到挤压时,提升电机21的输出轴放出钢丝绳,伸缩机构41的传感器66再受到挤压,伸缩机构41的伸缩端收回放开托起底板11,动力机构ⅰ的传感器66再受到挤压,动力机构ⅰ的输出轴转动一圈,即装置复位完成,可以对下一个物体进行存放。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1