一次成型的无焊接式新型翅片蒸发器的制作方法
1.本技术涉及无焊接式翅片蒸发器的领域,且更为具体地,涉及一种一次成型的无焊接式新型翅片蒸发器。
背景技术:
2.一般而言,蒸发器即液态物质转化为气态的物体。工业上有大量的蒸发器,其中应用于制冷系统的蒸发器是其中一种。蒸发器是制冷四大件中很重要的一个部件,低温的冷凝液体通过蒸发器,与外界的空气进行热交换,气化吸热,达到制冷的效果。
3.目前,翅片蒸发器就是其中一款使用较多的类型。在现有的蒸发器的翅片翻板角度控制中,由于其通过一个电机来统一控制各排翅片翻板的倾斜角度,因此,各排翅片翻板的角度是一致的。然而,在实际工作过程中,各排翅片翻板之间会存在相互影响,例如,当第一排翅片翻板发生第一角度的倾斜时,其会影响第二排翅片翻板处的空气流动情况。因此,各排翅片的倾角不同组合会影响其制冷效率。
4.因此,期待一种新型的翅片蒸发器。
技术实现要素:
5.为了解决上述技术问题,提出了本技术。本技术的实施例提供了一种一次成型的无焊接式新型翅片蒸发器,其包括框架主体和与所述框架主体一体成型的多排翅片主体、安装于所述多排翅片主体的冷媒管、可旋转地连接于所述多排翅片主体的多排翅片翻页、驱动所述多排翅片翻页转动的多个转动组件,以及,可通信地连接于所述多个转动组件的控制器,这里,所述控制器使用基于人工智能技术的智能控制方法来基于外界空气的流动情况通信控制所述多排翅片翻页中各排翅片翻页相对于其所安装的所述翅片主体进行转动,以达到优化制冷效率的技术目的。
6.根据本技术的一个方面,提供了一种一次成型的无焊接式新型翅片蒸发器,其包括:框架结构,包括框架主体和与所述框架主体一体成型的多排翅片主体;安装于所述多排翅片主体的冷媒管;分别可旋转地连接于所述多排翅片主体的多排翅片翻页;以及多个转动组件,其中,所述多个转动组件中每个转动组件适于驱动所述多排翅片翻页中一排翅片翻页相对于所述翅片主体进行转动。
7.在上述一次成型的无焊接式新型翅片蒸发器中,所述框架主体和所述多排翅片主体通过金属注塑成型工艺一体成型。
8.在上述一次成型的无焊接式新型翅片蒸发器中,所述无焊接式新型翅片蒸发器,还包括可通信地连接于所述多个转动组件的控制器,其中,所述控制器,包括推断模块,所述推断模块用于执行如下步骤:s1:获取所述多排翅片翻页中各排翅片翻页的倾斜角;s2:将所述多排翅片翻页中各排翅片翻页的倾斜角通过联合编码器的包含一维卷积层和全连接层的时序编码模块以获得角度特征向量;s3:获取外界环境的风数据,所述风数据包括风力和风向;s4:将所述风数据通过所述联合编码器的上下文编码模块以获得两个特征向量,
并将所述两个特征向量进行级联以生成风特征向量;s5:使用联合编码器将所述风特征向量和所述角度特征向量进行联合编码以生成分类特征矩阵;以及,s6:将所述分类矩阵通过分类器以获得分类结果,所述分类结果用于表示当前的所述多排翅片翻页中各排翅片翻页的倾斜角所构成的组合是否为最佳组合。
9.在上述一次成型的无焊接式新型翅片蒸发器中,所述控制器还包括训练模块,所述训练模块用于执行如下步骤:s11:获取训练数据,所述训练数据为所述多排翅片翻页中各排翅片翻页的倾斜角以及外界环境的风数据;s12:将所述训练数据中的所述多排翅片翻页中各排翅片翻页的倾斜角通过联合编码器的包含一维卷积层和全连接层的时序编码模块以获得角度特征向量;s13:将所述训练数据中的所述风数据通过所述联合编码器的上下文编码模块以获得两个特征向量,并将所述两个特征向量进行级联以生成风特征向量;s14:使用联合编码器将所述风特征向量和所述角度特征向量进行联合编码以生成分类特征矩阵; s15:将所述分类矩阵通过分类器以获得分类损失函数值;s16:计算所述第一特征向量和所述第二特征向量之间的尺度迁移确定性损失函数值,所述尺度迁移确定性损失函数值基于所述第一特征向量的转置乘以所述第二特征向量所获得的特征矩阵除以所述第一特征向量乘以所述第二特征向量的转置所获得的特征矩阵的frobenius范数生成;以及,s17:以所述分类损失函数值和所述尺度迁移确定性损失函数值的加权和作为损失函数值对所述联合编码器进行训练。
10.在上述一次成型的无焊接式新型翅片蒸发器中,所述训练模块,进一步用于:将所述训练数据中的所述多排翅片翻页中各排翅片翻页的倾斜角排列为对应于所述各排翅片翻页的一维的输入向量;使用所述联合编码器的包含一维卷积层和全连接层的时序编码模块的全连接层以如下公式对所述输入向量进行全连接编码以提取出所述输入向量中各个位置的特征值的高维隐含特征,其中,所述公式为:,其中是输入向量,是输出向量,是权重矩阵,是偏置向量,表示矩阵乘;使用所述联合编码器的包含一维卷积层和全连接层的时序编码模块的一维卷积层以如下公式对所述输入向量进行一维卷积编码以提取出所述输入向量中各个位置的特征值间的高维隐含关联特征,其中,所述公式为:其中,a为卷积核在x方向上的宽度、f为卷积核参数向量、g为与卷积核函数运算的局部向量矩阵,w为卷积核的尺寸。
11.在上述一次成型的无焊接式新型翅片蒸发器中,所述训练模块,进一步用于:使用所述联合编码器的上下文编码模块的嵌入层分别将所述训练数据中的所述风数据转化为输入向量以获得风输入向量的序列;使用所述联合编码器的上下文编码模块的转换器对所述风输入向量的序列进行基于全局的上下文语义编码以获得所述两个特征向量;将所述两个特征向量进行级联以生成所述风特征向量。
12.在上述一次成型的无焊接式新型翅片蒸发器中,所述训练模块,进一步用于:使用所述联合编码器以如下公式对所述风特征向量和所述角度特征向量进行联合编码以生成
所述分类特征矩阵;其中,所述公式为:其中表示向量相乘,表示所述分类特征矩阵,表示所述风特征向量,表示所述角度特征向量,表示所述角度特征向量的转置。
13.在上述一次成型的无焊接式新型翅片蒸发器中,所述训练模块,进一步用于:使用所述分类器以如下公式对所述分类矩阵进行处理以生成分类结果,其中,所述公式为:,其中表示将所述分类矩阵投影为向量,至为各层全连接层的权重矩阵,至表示各层全连接层的偏置矩阵;以及,计算所述分类结果与真实值之间的交叉熵值作为所述分类损失函数值。
14.在上述一次成型的无焊接式新型翅片蒸发器中,所述训练模块,进一步用于:以如下公式计算所述第一特征向量和所述第二特征向量之间的所述尺度迁移确定性损失函数值;其中,所述公式为:其中表示所述第一特征向量,表示所述第二特征向量,和与所述联合编码的向量形式相同,为列向量,且表示矩阵的frobenius范数。
15.根据本技术提供的一次成型的无焊接式新型翅片蒸发器,其包括框架主体和与所述框架主体一体成型的多排翅片主体,安装于所述多排翅片主体的冷媒管,可旋转地连接于所述多排翅片主体的多排翅片翻页,驱动所述多排翅片翻页转动的多个转动组件以及通信地连接于所述多个转动组件的控制器,这里,所述控制器能够使用人工智能技术的智能控制方法,来基于外界空气的流动情况通信控制所述转动组件以进行所述多排翅片翻页中各排翅片翻页相对于所述翅片主体的转动,进而达到优化制冷效率的效果。
附图说明
16.通过结合附图对本技术实施例进行更详细的描述,本技术的上述以及其他目的、特征和优势将变得更加明显。附图用来提供对本技术实施例的进一步理解,并且构成说明书的一部分,与本技术实施例一起用于解释本技术,并不构成对本技术的限制。在附图中,相同的参考标号通常代表相同部件或步骤。
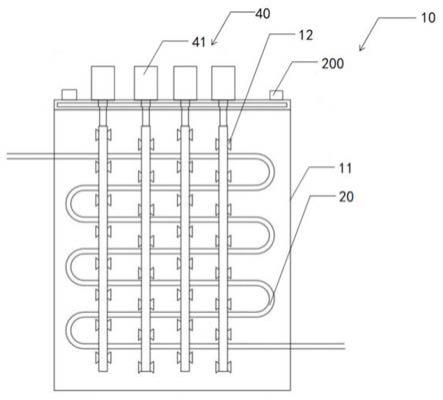
17.图1a和图1b为根据本技术实施例的一次成型的无焊接式新型翅片蒸发器的示意图。
18.图2为根据本技术实施例的一次成型的无焊接式新型翅片蒸发器中控制器的框图。
19.图3为根据本技术实施例的一次成型的无焊接式新型翅片蒸发器中控制器的训练
模块的流程图。
20.图4为根据本技术实施例的一次成型的无焊接式新型翅片蒸发器中控制器的推断模块的流程图。
21.图5为根据本技术实施例的一次成型的无焊接式新型翅片蒸发器中训练模块的架构示意图。
22.图6为根据本技术实施例的一次成型的无焊接式新型翅片蒸发器中推断模块的架构示意图。
具体实施方式
23.下面,将参考附图详细地描述根据本技术的示例实施例。显然,所描述的实施例仅仅是本技术的一部分实施例,而不是本技术的全部实施例,应理解,本技术不受这里描述的示例实施例的限制。
24.场景概述如前所述,在现有的蒸发器的翅片翻板角度控制中,由于其通过一个电机来统一控制各排翅片翻板的倾斜角度,因此,各排翅片翻板的角度是一致的,但在实际控制过程中,各排翅片翻板之间会存在相互影响,即,当第一排翅片翻板发生第一角度的倾斜时,其会影响第二排翅片翻板处的空气流动情况。经本技术发明人研究发现,各排翅片的倾角不同会带来不同的制冷效率。
25.因此,期待一种新型的翅片蒸发器,其能够基于外界空气的流动情况并自适应地调整各排翅片翻板的倾斜角以使得最终所有翅片翻板所实现的制冷效率能够实现最优化。
26.为此,本技术发明人尝试一种新型的无焊接式翅片蒸发器来从控制端基于当前多排翅片翻页中各排翅片翻页的倾斜角以及外界环境的风数据来智能动态地控制多排翅片翻页中各排翅片翻页的倾斜角,以提高制冷效率。其在结构层面,将翅片主体与主体框架说明为一体式结构,也就是,通过金属注塑成型工艺将框架主体和多排翅片主体一体成型,翅片翻页可旋转地连接于所述多排翅片主体上,为各排翅片翻页单独安排一个转动组件来实现各排翅片主体的转动。
27.在控制层面,无焊接式新型翅片蒸发器,包括了可通信地连接于所述多个转动组件的控制器,控制器能够基于外界空气的流动情况以通信控制转动组件来进行多排翅片翻页中各排翅片翻页相对于所述翅片主体的转动,进而达到优化制冷效率的效果。
28.具体地,在本技术的技术方案中,首先获取多排翅片翻页中各排翅片翻页的倾斜角以及外界环境的风数据,然后,将多排翅片翻页中各排翅片翻页的倾斜角通过联合编码器的包含一维卷积层和全连接层的时序编码模块中进行编码处理,以提取出多排翅片翻页中各排翅片翻页的倾斜角的高维隐含关联特征,从而获得角度特征向量。
29.并且,将外界环境的风数据通过联合编码器的上下文编码模块中进行全局编码,从而获得具有全局性风数据关联特征的风特征向量。这样,使用联合编码器将这两个特征向量进行联合编码就能够得到分类特征矩阵。
30.但是,在针对作为源特征的风数据特征和作为响应特征的角度特征进行联合编码器的联合编码以获得关联特征时,期望能够保证作为关联特征的分类矩阵在概率分布上的位置间一致性,因此设置尺度迁移确定性损失函数来对时序编码器和上下文编码器的特征
编码进行约束,表示为:表示为:和与联合编码的向量形式相同,为列向量,且表示矩阵的frobenius范数。
[0031] 应可以理解,通过该尺度迁移确定性损失函数,可以通过约束时序编码器和上下文编码器的特征编码来以特征向量间的相对位置嵌入保留高维特征的尺度迁移下的远程(long range)关系,从而保证角度特征向量和风特征向量在关联特征表征方面各位置具有概率分布上的一定程度的一致性。
[0032]
基于此,本技术提出了一种一次成型的无焊接式新型翅片蒸发器,其包括:框架结构,包括框架主体和与所述框架主体一体成型的多排翅片主体;安装于所述多排翅片主体的冷媒管;分别可旋转地连接于所述多排翅片主体的多排翅片翻页;以及,多个转动组件,其中,所述多个转动组件中每个转动组件适于驱动所述多排翅片翻页中一排翅片翻页相对于所述翅片主体进行转动。特别地,所述框架主体和所述多排翅片主体通过金属注塑成型工艺一体成型。
[0033]
在介绍了本技术的基本原理之后,下面将参考附图来具体介绍本技术的各种非限制性实施例。
[0034]
示例性翅片蒸发器图1a和图1b图示了根据本技术实施例的所述一次成型的无焊接式新型翅片蒸发器的示意图。如图1a和图1b所示,所述一次成型的无焊接式新型翅片蒸发器包括框架结构 10、其中,所述框架结构 10包括框架主体 11和与所述框架主体 11一体成型的多排翅片主体 12。所述一次成型的无焊接式新型翅片蒸发器还包括安装于所述多排翅片主体 12的冷媒管 20、分别可旋转地连接于所述多排翅片主体 12的多排翅片翻页 13,以及,多个转动组件 40。
[0035]
具体地,所述框架结构 10包括框架主体 11和与所述框架主体 11一体成型的多排翅片主体 12。应注意到,在本技术实施例中,所述框架主体 11和所述多排翅片主体 12一体成型,也就是,所述框架主体 11和所述多排翅片主体 12之间通过无焊接的方式集成在一起,通过这样的方式,可避免因在所述框架主体 11和所述多排翅片主体 12之间施加焊接工艺形成的焊缝带来所述翅片蒸发器的寿命的缩减。应可以理解,如果两个金属件通过焊接结合在一起,两者之间的焊接位置更容易被腐蚀。在本技术一个具体的示例中,所述框架主体 11和所述多排翅片主体 12通过金属注塑成型工艺一体成型。当然,在本技术其他示例中,所述多排翅片主体 12还可以通过其他方式与所述框架主体 11一体成型,对此,并不为本技术所局限。
[0036]
进一步地,在本技术实施例中,所述多排翅片翻页 13可旋转地连接于所述多排翅片主体 12,例如,所述多排翅片翻页 13通过枢转轴可旋转地安装于所述多排翅片主体 12,这样所述多排翅片翻页 13能够相对于所述多排翅片主体 12发生转动以优化制冷效率。
[0037]
为了驱动所述多排翅片翻页 13相对于所述多排翅片主体 12发生转动,所述翅片
蒸发器进一步包括所述多个转动组件 40,其中,所述多个转动组件 40,所述多个转动组件 40中每个转动组件 40适于驱动所述多排翅片翻页 13中一排翅片翻页 13相对于所述翅片主体进行转动。在一个具体的示例中,所述多个转动组件 40中各个转动组件 40包括一个驱动电机 41,以通过驱动电机 41来驱动所述翅片翻页 13相对于其所安装的翅片主体进行旋转。
[0038]
如前所述,在现有的蒸发器的翅片翻板角度控制中,由于其通过一个电机来统一控制各排翅片翻板的倾斜角度,因此,各排翅片翻板的角度是一致的,但在实际控制过程中,各排翅片翻板之间会存在相互影响,即,当第一排翅片翻板发生第一角度的倾斜时,其会影响第二排翅片翻板处的空气流动情况。
[0039]
为此,本技术发明人尝试一种新型的无焊接式翅片蒸发器来从控制端基于当前多排翅片翻页 13中各排翅片翻页 13的倾斜角以及外界环境的风数据来智能动态地控制多排翅片翻页 13中各排翅片翻页 13的倾斜角,以提高制冷效率。其在结构层面,将翅片主体与主体框架说明为一体式结构,也就是,通过金属注塑成型工艺将框架主体 11和多排翅片主体 12一体成型,翅片翻页 13可旋转地连接于所述多排翅片主体 12上,为各排翅片翻页 13单独安排一个转动组件 40来实现各排翅片主体的转动。
[0040]
在控制层面,无焊接式新型翅片蒸发器,包括了可通信地连接于所述多个转动组件 40的控制器,控制器能够基于外界空气的流动情况以通信控制转动组件 40来进行多排翅片翻页 13中各排翅片翻页 13相对于所述翅片主体的转动,进而达到优化制冷效率的效果。
[0041]
图2图示了根据本技术实施例的一次成型的无焊接式新型翅片蒸发器中控制器的框图。如图2所示,根据本技术实施例的一次成型的无焊接式新型翅片蒸发器中的控制器 200,包括:训练模块 210和推断模块 220。
[0042]
图3图示了根据本技术实施例的一次成型的无焊接式新型翅片蒸发器中控制器的训练模块的流程图。如图3所示,根据本技术实施例的一次成型的无焊接式新型翅片蒸发器中控制器的训练模块 210,包括步骤:s11,获取训练数据,所述训练数据为所述多排翅片翻页中各排翅片翻页的倾斜角以及外界环境的风数据;s12,将所述训练数据中的所述多排翅片翻页中各排翅片翻页的倾斜角通过联合编码器的包含一维卷积层和全连接层的时序编码模块以获得角度特征向量;s13,将所述训练数据中的所述风数据通过所述联合编码器的上下文编码模块以获得两个特征向量,并将所述两个特征向量进行级联以生成风特征向量;s14,使用联合编码器将所述风特征向量和所述角度特征向量进行联合编码以生成分类特征矩阵;s15,将所述分类矩阵通过分类器以获得分类损失函数值;s16,计算所述第一特征向量和所述第二特征向量之间的尺度迁移确定性损失函数值,所述尺度迁移确定性损失函数值基于所述第一特征向量的转置乘以所述第二特征向量所获得的特征矩阵除以所述第一特征向量乘以所述第二特征向量的转置所获得的特征矩阵的frobenius范数生成;以及,s17,以所述分类损失函数值和所述尺度迁移确定性损失函数值的加权和作为损失函数值对所述联合编码器进行训练。
[0043]
图4图示了根据本技术实施例的一次成型的无焊接式新型翅片蒸发器中控制器的推断阶段的流程图。如图4所示,根据本技术实施例的一次成型的无焊接式新型翅片蒸发器中控制器的训练模块 220,包括步骤:s1,获取所述多排翅片翻页中各排翅片翻页的倾斜
角;s2,将所述多排翅片翻页中各排翅片翻页的倾斜角通过联合编码器的包含一维卷积层和全连接层的时序编码模块以获得角度特征向量;s3,获取外界环境的风数据,所述风数据包括风力和风向;s4,将所述风数据通过所述联合编码器的上下文编码模块以获得两个特征向量,并将所述两个特征向量进行级联以生成风特征向量;s5,使用联合编码器将所述风特征向量和所述角度特征向量进行联合编码以生成分类特征矩阵;s6,将所述分类矩阵通过分类器以获得分类结果,所述分类结果用于表示当前的所述多排翅片翻页中各排翅片翻页的倾斜角所构成的组合是否为最佳组合。
[0044]
图5图示了根据本技术实施例的一次成型的无焊接式新型翅片蒸发器中训练模块的架构示意图。如图5所示,在训练模块中,在该网络架构中,首先,将获得的所述训练数据中的所述多排翅片翻页中各排翅片翻页的倾斜角(例如,如图5中所示意的p1)通过联合编码器的包含一维卷积层和全连接层的时序编码模块(例如,如图5中所示意的e1)以获得角度特征向量(例如,如图5中所示意的vf1);接着,将所述训练数据中的所述风数据(例如,如图5中所示意的p2)通过所述联合编码器的上下文编码模块(例如,如图5中所示意的e2)以获得两个特征向量(例如,如图5中所示意的vf),并将所述两个特征向量进行级联以生成风特征向量(例如,如图5中所示意的vf2);然后,使用联合编码器(例如,如图6中所示意的e)将所述风特征向量和所述角度特征向量进行联合编码以生成分类特征矩阵(例如,如图5中所示意的mf);接着,将所述分类矩阵通过分类器(例如,如图5中所示意的分类器)以获得分类损失函数值(例如,如图5中所示意的clv);然后,计算所述第一特征向量和所述第二特征向量之间的尺度迁移确定性损失函数值(例如,如图5中所示意的smv);以及,最后,以所述分类损失函数值和所述尺度迁移确定性损失函数值的加权和作为损失函数值(例如,如图5中所示意的lv)对所述联合编码器进行训练。
[0045]
图6图示了根据本技术实施例的一次成型的无焊接式新型翅片蒸发器中推断模块的架构示意图。如图6所示,在推断模块中,在该网络结构中,首先,将获得的所述多排翅片翻页中各排翅片翻页的倾斜角(例如,如图6中所示意的p1)通过联合编码器的包含一维卷积层和全连接层的时序编码模块(例如,如图6中所示意的c1)以获得角度特征向量(例如,如图6中所示意的vf1);接着,将获得的所述风数据(例如,如图6中所示意的p2)通过所述联合编码器的上下文编码模块(例如,如图6中所示意的c2)以获得两个特征向量(例如,如图6中所示意的vf),并将所述两个特征向量进行级联以生成风特征向量(例如,如图6中所示意的vf2);然后,使用联合编码器(例如,如图6中所示意的c)将所述风特征向量和所述角度特征向量进行联合编码以生成分类特征矩阵(例如,如图6中所示意的mf);最后,将所述分类矩阵通过分类器(例如,如图6中所示意的分类器)以获得分类结果,所述分类结果用于表示当前的所述多排翅片翻页中各排翅片翻页的倾斜角所构成的组合是否为最佳组合。
[0046]
更具体地,在训练模块中,在步骤s11和步骤s12中,获取训练数据,所述训练数据为所述多排翅片翻页中各排翅片翻页的倾斜角以及外界环境的风数据,并将所述训练数据中的所述多排翅片翻页中各排翅片翻页的倾斜角通过联合编码器的包含一维卷积层和全连接层的时序编码模块以获得角度特征向量。如前所述,本技术期望从控制端基于当前多排翅片翻页中各排翅片翻页的倾斜角以及外界环境的风数据来智能动态地控制所述多排翅片翻页中各排翅片翻页的倾斜角,以提高制冷效率。也就是,在控制层面,提供的所述无焊接式新型翅片蒸发器包括了可通信地连接于所述多个转动组件的控制器,所述控制器能
够基于外界空气的流动情况以通信控制所述转动组件来进行所述多排翅片翻页中各排翅片翻页相对于所述翅片主体的转动,进而达到优化制冷效率的效果。
[0047]
因此,在本技术的技术方案中,首先,通过设置于所述多排翅片翻页中的各排翅片翻页的倾角传感器获取所述各排翅片翻页的倾斜角,以及通过设置于蒸发器的风力风向测试仪获取外界环境的风数据以作为训练数据。然后,将所述多排翅片翻页中各排翅片翻页的倾斜角通过联合编码器的包含一维卷积层和全连接层的时序编码模块中进行编码处理,以提取出所述多排翅片翻页中各排翅片翻页的倾斜角的高维隐含关联特征,从而获得所述角度特征向量。
[0048]
具体地,在本技术实施例中,将所述训练数据中的所述多排翅片翻页中各排翅片翻页的倾斜角通过联合编码器的包含一维卷积层和全连接层的时序编码模块以获得角度特征向量的过程,包括:首先,将所述训练数据中的所述多排翅片翻页中各排翅片翻页的倾斜角排列为对应于所述各排翅片翻页的一维的输入向量。然后,使用所述联合编码器的包含一维卷积层和全连接层的时序编码模块的全连接层以如下公式对所述输入向量进行全连接编码以提取出所述输入向量中各个位置的特征值的高维隐含特征,其中,所述公式为:,其中是输入向量,是输出向量,是权重矩阵,是偏置向量,表示矩阵乘。最后,使用所述联合编码器的包含一维卷积层和全连接层的时序编码模块的一维卷积层以如下公式对所述输入向量进行一维卷积编码以提取出所述输入向量中各个位置的特征值间的高维隐含关联特征,其中,所述公式为:其中,a为卷积核在x方向上的宽度、f为卷积核参数向量、g为与卷积核函数运算的局部向量矩阵,w为卷积核的尺寸。
[0049]
更具体地,在训练模块中,在步骤s13中,将所述训练数据中的所述风数据通过所述联合编码器的上下文编码模块以获得两个特征向量,并将所述两个特征向量进行级联以生成风特征向量。应可以理解,由于现有的蒸发器大多数是通过一个电机来统一控制所述各排翅片翻板的倾斜角度,因此,所述各排翅片翻板的角度是一致的,但在实际控制过程中,所述各排翅片翻板之间会存在相互影响,即,当第一排翅片翻板发生第一角度的倾斜时,其会影响第二排翅片翻板处的空气流动情况。因此,在本技术的技术方案中,进一步将所述外界环境的风数据通过联合编码器的上下文编码模块中进行全局编码,从而获得具有全局性风数据关联特征的所述风特征向量。
[0050]
具体地,在本技术实施例中,将所述训练数据中的所述风数据通过所述联合编码器的上下文编码模块以获得两个特征向量,并将所述两个特征向量进行级联以生成风特征向量的过程,包括:首先,使用所述联合编码器的上下文编码模块的嵌入层分别将所述训练数据中的所述风数据转化为输入向量以获得风输入向量的序列。然后,使用所述联合编码器的上下文编码模块的转换器对所述风输入向量的序列进行基于全局的上下文语义编码以获得所述两个特征向量。最后,将所述两个特征向量进行级联以生成所述风特征向量。应可以理解,由于基于上下文的编码器模块能够基于上下文对所述风输入向量进行全局性的风数据关联特征编码,因此所获得的所述特征向量具有全局性的风数据关联特征信息。
[0051]
更具体地,在训练模块中,在步骤s14和步骤s15中,使用联合编码器将所述风特征向量和所述角度特征向量进行联合编码以生成分类特征矩阵,并将所述分类矩阵通过分类器以获得分类损失函数值。也就是,在本技术的技术方案中,进一步使用所述联合编码器将所述风特征向量和所述角度特征向量进行联合编码以融合两者的特征信息来生成分类特征矩阵,接着将其通过分类器以获得分类损失函数值,以便于后续对所述联合编码器进行训练。相应地,在一个具体示例中,使用所述分类器以如下公式对所述分类矩阵进行处理以生成分类结果,其中,所述公式为:,其中表示将所述分类矩阵投影为向量,至为各层全连接层的权重矩阵,至表示各层全连接层的偏置矩阵;以及,计算所述分类结果与真实值之间的交叉熵值作为所述分类损失函数值。
[0052]
具体地,在本技术实施例中,使用联合编码器将所述风特征向量和所述角度特征向量进行联合编码以生成分类特征矩阵的过程,包括:使用所述联合编码器以如下公式对所述风特征向量和所述角度特征向量进行联合编码以生成所述分类特征矩阵;其中,所述公式为:其中表示向量相乘,表示所述分类特征矩阵,表示所述风特征向量,表示所述角度特征向量,表示所述角度特征向量的转置。
[0053]
更具体地,在训练模块中,在步骤s16和步骤s17中,计算所述第一特征向量和所述第二特征向量之间的尺度迁移确定性损失函数值,所述尺度迁移确定性损失函数值基于所述第一特征向量的转置乘以所述第二特征向量所获得的特征矩阵除以所述第一特征向量乘以所述第二特征向量的转置所获得的特征矩阵的frobenius范数生成,并以所述分类损失函数值和所述尺度迁移确定性损失函数值的加权和作为损失函数值对所述联合编码器进行训练。应可以理解,在针对作为源特征的所述风数据特征和作为响应特征的所述角度特征进行联合编码器的联合编码以获得所述关联特征时,期望能够保证作为所述关联特征的分类矩阵在概率分布上的位置间一致性。因此,在本技术的技术方案中,设置尺度迁移确定性损失函数来对所述时序编码器和所述上下文编码器的特征编码进行约束。然后,以所述分类损失函数值和所述尺度迁移确定性损失函数值的加权和作为损失函数值对所述联合编码器进行训练。
[0054]
具体地,在本技术实施例中,计算所述第一特征向量和所述第二特征向量之间的尺度迁移确定性损失函数值的过程,包括:以如下公式计算所述第一特征向量和所述第二特征向量之间的所述尺度迁移确定性损失函数值;其中,所述公式为:其中表示所述第一特征向量,表示所述第二特征向量,和与所述联合编码的向量形式相同,为列向量,且表示矩阵的frobenius范数。应可以理解,通过
该所述尺度迁移确定性损失函数,可以通过约束所述时序编码器和所述上下文编码器的特征编码来以特征向量间的相对位置嵌入保留高维特征的尺度迁移下的远程(long range)关系,从而保证所述角度特征向量和所述风特征向量在关联特征表征方面各位置具有概率分布上的一定程度的一致性。
[0055]
在训练完成后,进入推断模块。也就是,在使用一次成型的无焊接式新型翅片蒸发器算法来训练所述联合编码器后,将训练完成的所述联合编码器用于实际的所述多排翅片翻页中各排翅片翻页的倾斜角的控制中,以优化制冷效率。
[0056]
更具体地,在推断模块中,首先,获取所述多排翅片翻页中各排翅片翻页的倾斜角;接着,将所述多排翅片翻页中各排翅片翻页的倾斜角通过联合编码器的包含一维卷积层和全连接层的时序编码模块以获得角度特征向量;然后,获取外界环境的风数据,所述风数据包括风力和风向;接着,将所述风数据通过所述联合编码器的上下文编码模块以获得两个特征向量,并将所述两个特征向量进行级联以生成风特征向量;然后,使用联合编码器将所述风特征向量和所述角度特征向量进行联合编码以生成分类特征矩阵;最后,将所述分类矩阵通过分类器以获得分类结果,所述分类结果用于表示当前的所述多排翅片翻页中各排翅片翻页的倾斜角所构成的组合是否为最佳组合。
[0057]
综上,基于本技术实施例的一次成型的无焊接式新型翅片蒸发器被阐明,其包括框架主体和与所述框架主体一体成型的多排翅片主体,安装于所述多排翅片主体的冷媒管,可旋转地连接于所述多排翅片主体的多排翅片翻页,驱动所述多排翅片翻页转动的多个转动组件以及通信地连接于所述多个转动组件的控制器,这里,所述控制器能够使用人工智能技术的智能控制方法,来基于外界空气的流动情况通信控制所述转动组件以进行所述多排翅片翻页中各排翅片翻页相对于所述翅片主体的转动,进而达到优化制冷效率的效果。
[0058]
以上结合具体实施例描述了本技术的基本原理,但是,需要指出的是,在本技术中提及的优点、优势、效果等仅是示例而非限制,不能认为这些优点、优势、效果等是本技术的各个实施例必须具备的。另外,上述公开的具体细节仅是为了示例的作用和便于理解的作用,而非限制,上述细节并不限制本技术为必须采用上述具体的细节来实现。
[0059]
本技术中涉及的器件、装置、设备、系统的方框图仅作为例示性的例子并且不意图要求或暗示必须按照方框图示出的方式进行连接、布置、配置。如本领域技术人员将认识到的,可以按任意方式连接、布置、配置这些器件、装置、设备、系统。诸如“包括”、“包含”、“具有”等等的词语是开放性词汇,指“包括但不限于”,且可与其互换使用。这里所使用的词汇“或”和“和”指词汇“和/或”,且可与其互换使用,除非上下文明确指示不是如此。这里所使用的词汇“诸如”指词组“诸如但不限于”,且可与其互换使用。
[0060]
还需要指出的是,在本技术的装置、设备和方法中,各部件或各步骤是可以分解和/或重新组合的。这些分解和/或重新组合应视为本技术的等效方案。
[0061]
提供所公开的方面的以上描述以使本领域的任何技术人员能够做出或者使用本技术。对这些方面的各种修改对于本领域技术人员而言是非常显而易见的,并且在此定义的一般原理可以应用于其他方面而不脱离本技术的范围。因此,本技术不意图被限制到在此示出的方面,而是按照与在此公开的原理和新颖的特征一致的最宽范围。
[0062]
为了例示和描述的目的已经给出了以上描述。此外,此描述不意图将本技术的实
施例限制到在此公开的形式。尽管以上已经讨论了多个示例方面和实施例,但是本领域技术人员将认识到其某些变型、修改、改变、添加和子组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1