具有整体式过冷器的离心式冷却器上的膨胀控制系统的制作方法
1.本文的实施例通常涉及制冷剂蒸汽(vapor)压缩系统,并且更特别地涉及增加制冷剂蒸汽压缩系统中的膨胀阀的容量(capacity)。
背景技术:
2.制冷剂蒸汽压缩系统在本领域中是众所周知的,并且通常用于调节供应到住宅、办公建筑、医院、学校、餐馆或其它设施内的气候受控舒适区的空气。制冷剂蒸汽压缩系统还通常用于对供应到展示箱(display case)、陈列柜(merchandiser)、冷冻柜、冷藏室或商业机构中的其它易腐/冷冻产品存储区域的空气进行制冷。
3.传统上,常规的制冷剂蒸汽压缩系统通常在亚临界制冷剂压力下操作,并且通常包括压缩机、冷凝器和蒸发器,以及膨胀装置(通常为膨胀阀),其相对于制冷剂流设置在蒸发器的上游和冷凝器的下游。这些基本的制冷剂系统组件通过闭合制冷剂回路中的制冷剂管线(line)互连,根据已知的制冷剂蒸汽压缩循环布置,并且对于使用中的特定制冷剂在亚临界压力范围中操作。在亚临界范围中操作的制冷剂蒸汽压缩系统通常填充有碳氟化合物制冷剂,例如但不限于含氯氟碳氢化合物(hcfc)(例如r22)以及更常见的氢氟烃(hfc)(例如r134a、r410a、r404a和r407c)。
技术实现要素:
4.根据一个实施例,提供一种蒸汽压缩系统。所述蒸汽压缩系统包括:冷凝器;蒸发器;以及膨胀控制系统,所述膨胀控制系统位于所述冷凝器与所述蒸发器之间的主流动路径上,其中所述膨胀控制系统还包括:一个或多个电子膨胀阀;以及调制的球阀。
5.除上文描述的特征中的一个或多个特征外或作为备选方案,另外的实施例可包括所述调制的球阀位于与所述一个或多个电子膨胀阀平行的制冷剂流动路径中。
6.除上文描述的特征中的一个或多个特征外或作为备选方案,另外的实施例可包括所述一个或多个电子膨胀阀各自配置成执行制冷剂通过所述主流动路径的精流控制(fine flow control),并且其中所述调制的球阀配置成执行所述制冷剂通过所述主流动路径的粗流控制(coarse flow control)。
7.除上文描述的特征中的一个或多个特征外或作为备选方案,另外的实施例可包括所述一个或多个电子膨胀阀配置成关闭和打开到完全打开与完全关闭之间的任何位置,并且其中所述调制的球阀配置成关闭和打开到设定的限定百分比打开增量位置。
8.除上文描述的特征中的一个或多个特征外或作为备选方案,另外的实施例可包括控制器,所述控制器用来控制所述一个或多个电子膨胀阀和所述调制的球阀的操作。
9.除上文描述的特征中的一个或多个特征外或作为备选方案,另外的实施例可包括沿着所述冷凝器和所述膨胀控制系统之间的主流动路径的节约装置(economizer)。
10.除上文描述的特征中的一个或多个特征外或作为备选方案,另外的实施例可包括所述膨胀控制系统还包括:球阀接合点,所述球阀接合点将所述膨胀控制系统流体连接到
所述节约装置;蒸发器接合点,所述蒸发器接合点将所述膨胀控制系统流体连接到所述蒸发器;球阀管线,所述球阀管线从所述球阀接合点延伸到所述蒸发器接合点,所述调制的球阀位于所述球阀管线中;以及膨胀阀管线,所述膨胀阀管线从所述球阀接合点延伸到所述蒸发器接合点,所述一个或多个电子膨胀阀位于所述膨胀阀管线中,其中所述球阀接合点配置成将所述主流动路径分为所述膨胀阀管线和所述球阀管线,并且其中所述蒸发器接合点配置成将所述膨胀阀管线和所述球阀管线组合为所述主流动路径。
11.除上文描述的特征中的一个或多个特征外或作为备选方案,另外的实施例可包括所述冷凝器还包括位于所述冷凝器内的过冷器(subcooler)。
12.根据另一个实施例,提供一种操作蒸汽压缩系统的方法。所述方法包括:在所述蒸汽压缩系统中检测喘振(surge)、低负载或低扬程(lift)状况;以及基于所述喘振、所述低负载或所述低扬程状况而使用一个或多个电子膨胀阀和调制的球阀来计量通过主流动路径的制冷剂流,其中所述调制的球阀和所述一个或多个电子膨胀阀在所述蒸汽压缩系统的冷凝器与蒸发器之间的主流动路径上位于膨胀控制系统中。
13.除上文描述的特征中的一个或多个特征外或作为备选方案,另外的实施例可包括先于在所述蒸汽压缩系统中检测所述喘振、所述低负载或所述低扬程状况,所述方法还包括:使用所述一个或多个电子膨胀阀而不是所述调制的球阀来计量通过所述主流动路径的所述制冷剂流。
14.除上文描述的特征中的一个或多个特征外或作为备选方案,另外的实施例可包括所述调制的球阀位于与所述一个或多个电子膨胀阀平行的制冷剂流动路径中。
15.除上文描述的特征中的一个或多个特征外或作为备选方案,另外的实施例可包括基于所述喘振、所述低负载或所述低扬程状况而使用所述一个或多个电子膨胀阀和所述调制的球阀来计量通过所述主流动路径的所述制冷剂流还包括:使用所述一个或多个电子膨胀阀来执行所述制冷剂通过所述主流动路径的精流控制,并且使用所述调制的球阀来执行所述制冷剂通过所述主流动路径的粗流控制。
16.除上文描述的特征中的一个或多个特征外或作为备选方案,另外的实施例可包括使用所述一个或多个电子膨胀阀来执行所述制冷剂通过所述主流动路径的精流控制还包括:将所述一个或多个电子膨胀阀调节到完全打开与完全关闭之间的任何位置。
17.除上文描述的特征中的一个或多个特征外或作为备选方案,另外的实施例可包括使用所述调制的球阀来执行所述制冷剂通过所述主流动路径的粗流控制还包括:将所述调制的球阀调节到一个或多个设定的限定百分比打开增量位置。
18.除上文描述的特征中的一个或多个特征外或作为备选方案,另外的实施例可包括所述膨胀控制系统还包括:沿着所述冷凝器和所述膨胀控制系统之间的主流动路径的节约装置。
19.除上文描述的特征中的一个或多个特征外或作为备选方案,另外的实施例可包括所述膨胀控制系统还包括:球阀接合点,所述球阀接合点将所述膨胀控制系统流体连接到所述节约装置;蒸发器接合点,所述蒸发器接合点将所述膨胀控制系统流体连接到所述蒸发器;球阀管线,所述球阀管线从所述球阀接合点延伸到所述蒸发器接合点,所述调制的球阀位于所述球阀管线中;以及膨胀阀管线,所述膨胀阀管线从所述球阀接合点延伸到所述蒸发器接合点,所述一个或多个电子膨胀阀位于所述膨胀阀管线中,其中所述球阀接合点
配置成将所述主流动路径分位所述膨胀阀管线和所述球阀管线,并且其中所述蒸发器接合点配置成将所述膨胀阀管线和所述球阀管线组合为所述主流动路径。
20.根据另一个实施例,提供一种有形地体现在非暂时计算机可读介质上的计算机程序产品。所述计算机程序产品包括指令,所述指令在由处理器执行时使得所述处理器执行操作,所述操作包括:在蒸汽压缩系统中检测喘振、低负载或低扬程状况;以及基于所述喘振、所述低负载或所述低扬程状况而使用一个或多个电子膨胀阀和调制的球阀来计量通过主流动路径的制冷剂流,其中所述调制的球阀和所述一个或多个电子膨胀阀在所述蒸汽压缩系统的冷凝器与蒸发器之间的主流动路径上位于膨胀控制系统中。
21.除上文描述的特征中的一个或多个特征外或作为备选方案,另外的实施例可包括先于在所述蒸汽压缩系统中检测所述喘振、所述低负载或所述低扬程状况,所述操作还包括:使用所述一个或多个电子膨胀阀而不是所述调制的球阀来计量通过所述主流动路径的所述制冷剂流。
22.除上文描述的特征中的一个或多个特征外或作为备选方案,另外的实施例可包括基于所述喘振、所述低负载或所述低扬程状况而使用所述一个或多个电子膨胀阀和所述调制的球阀来计量通过所述主流动路径的所述制冷剂流还包括:使用所述一个或多个电子膨胀阀来执行所述制冷剂通过所述主流动路径的精流控制,并且使用所述调制的球阀来执行所述制冷剂通过所述主流动路径的粗流控制。
23.除上文描述的特征中的一个或多个特征外或作为备选方案,另外的实施例可包括使用所述一个或多个电子膨胀阀来执行所述制冷剂通过所述主流动路径的精流控制还包括:将所述一个或多个电子膨胀阀调节到完全打开与完全关闭之间的任何位置。
24.本公开的实施例的技术效果包括使用以彼此平行的流动路径定向的电子膨胀阀和调制的球阀来计量通过冷凝器和蒸发器之间的主流动路径的制冷剂流。
25.除非另有明确地指示,否则前述特征和元件可以以各种组合形式进行组合而没有排他性。根据以下描述和附图,这些特征和元件以及其操作将变得更加明显。然而,应当理解,以下描述和附图旨在本质上是说明性和解释性的,而非限制性的。
附图说明
26.以下描述无论如何都不应当被理解为进行限制。参照附图,相似元件被相似地编号:图1是根据本公开的实施例的蒸汽压缩系统的示意图;以及图2是根据本公开的实施例的图示操作图1的蒸汽压缩系统的方法的流程图。
具体实施方式
27.本文参照附图通过例示而不是限制的方式来提供所公开设备和方法的一个或多个实施例的详细描述。
28.蒸汽压缩系统通常包括定位于冷凝器的下游和蒸发器的上游的主膨胀阀。所述系统的主膨胀阀可能不足够大或物理上不能处置蒸汽压缩系统中的喘振或低扬程状况,同时使容量最大化。主膨胀阀可以是电子膨胀阀。在过大的单个电子膨胀阀中,其将被需要处置喘振和低扬程状况。两个电子膨胀阀可以平行放置,但是两个电子膨胀阀中的每个可能仍
然过大。可以并行放置更多个电子膨胀阀以解决这个问题。例如,可以并行放置三个或四个电子膨胀阀。然而,电子膨胀阀慢打开,并且可能慢响应喘振和低扬程状况。为了相对快地处置喘振和低扬程状况,本文公开的实施例寻求将调制的球阀与电子膨胀阀并行放置。有利地,通过相对更快地调节流截面(flow cross section),调制的球阀可以响应于喘振和低扬程状况而更快地调节。
29.图1示出蒸汽压缩系统20。图1示出与操作条件相关联的流动箭头(以及由此相关联的阀条件),所述操作条件可以对应启动条件,或者通常对应其中冷凝器58和蒸发器88之间存在低压差的条件。下面进一步讨论其它操作条件。蒸汽压缩系统20可被视为具有驱动制冷剂的再循环流动的压缩机22的冷却器。压缩机22可以是具有第一级24和第二级26的两级离心式压缩机。两级的推进器可以是同轴式的,并由具有定子30和转子32的电马达28直接驱动。压缩机22具有支撑一个或多个轴承36的壳体或箱34,以进而支撑转子32,以用于围绕其形成压缩机22的中心纵向轴线的中心纵向轴线500旋转。轴承36可以是具有径向地夹在转子32上的内座圈(例如,安装到轴)与壳体上的外座圈(例如,压配合到轴承隔室中)之间的一个或多个周向滚动元件阵列的滚动元件轴承。滚动元件可以包括球、直滚子(roller)(例如包括针)和锥形滚子。轴承36可以是具有钢座圈和陶瓷滚动元件的混合轴承。陶瓷滚动元件可以是氮化硅陶瓷球。
30.图1中所图示的蒸汽压缩系统20可以是基本上无油或无润滑剂的系统。理解的是,虽然蒸汽压缩系统20被图示为无油或无润滑剂的系统,但本文公开的实施例也适用于要求油或润滑剂的蒸汽压缩系统。因此,它可以省略传统油系统的各种组件,例如专用油泵、油分离器、储油器等。然而,通常可用作润滑剂的非常少量的油或其它材料可包括在整个制冷剂充注量(refrigerant charge)中,以提供远超过这样的材料将预期提供的基本上不存在的润滑量的益处。然而,理解的是,本文公开的实施例也适用于更传统的油系统。
31.压缩机22具有整体入口(入口端口或吸入端口)40和整体出口(出口端口或排出端口)42。在所图示的配置中,出口42是第二级26的出口。入口40在入口导向叶片阵列44的上游,所述入口导向叶片阵列44又在第一级入口46的上游。第一级出口48通过级间管线(级间)52耦合到第二入口50。第二入口50在入口导向叶片阵列55的上游,所述入口导向叶片阵列55又在第二级入口53的上游。另一种变型是具有入口导向叶片的单级压缩机。
32.如下面进一步讨论的,附加的制冷剂流可以在附加的位置处离开和/或进入压缩机22。从排出端口42,主制冷剂流动路径54在正常操作模式下沿着排出管线56向下游前进到第一热交换器或冷凝器58。在正常操作模式中,冷凝器58是排热热交换器。冷凝器58是制冷剂-水热交换器,其中制冷剂在承载水(或其它液体)流的管束的管之上通过。冷凝器58包括用于水流或其它传热流体流的传热流体入口57和传热流体出口59。冷凝器58具有一个或多个入口和一个或多个出口。冷凝器58包括主入口60和主出口62。主出口62是在冷凝器58的容器的底部处的贮槽(sump)64的出口。下面示出并讨论附加的贮槽64出口。贮槽64和主出口62是过冷器65的一部分。过冷器65具有略高于冷凝器58的容器的底部的底板。端口104从冷凝器58的容器的底部出来,冷凝器58向电马达28提供液体进料和冷却。当调制的球阀240打开球阀管线时,液体制冷剂从过冷器65排出,并且在主流动路径54中存在制冷剂的液体和蒸汽混合物,这就是为什么调制的球阀240和球阀管线206也作为热气旁路工作。
33.蒸汽压缩系统20是具有沿着主流动路径54在冷凝器58下游的节约装置70的节约
系统。节约装置70是具有入口72、节约装置液体出口74和蒸汽出口76的钎焊板式热交换器节约装置。在所图示的实现中,蒸汽出口76连接到节约装置管线80,所述节约装置管线80限定节约装置流动路径84以作为主流动路径54的分支,从而返回到压缩机22的节约装置端口86,所述节约装置端口86可以在级间52处。
34.主流动路径54从节约装置液体出口74向下游通过节约装置流出管线78和膨胀控制流入管线202进入膨胀控制系统200。节约装置流出管线78在节约装置液体出口74处流体连接到节约装置70。膨胀控制流入管线202在节约装置接合点96处流体连接到节约装置流出管线78。节约装置接合点96将膨胀控制系统200流体连接到节约装置70。
35.节约装置返回管线79可以将节约装置接合点96流体连接到节约装置返回入口端口77。节约装置返回电子膨胀阀300可以位于节约装置返回管线79中。节约装置返回电子膨胀阀300可以处于关闭位置中以防止制冷剂流回到节约装置70中。节约装置返回电子膨胀阀300可以处于接通或打开位置中,并配置成通过节约装置返回入口端口77将选定量的制冷剂返回到节约装置70中。节约装置返回电子膨胀阀300从节约装置接合点96获取制冷剂流,并通过节约装置返回管线79进入节约装置70的蒸发器侧对其进行计量。压力传感器512可位于节约装置管线80上或节约装置管线80中,并配置成检测节约装置管线80内的制冷剂的压力。温度传感器514可以位于节约装置管线80上或节约装置管线80中,并且配置成检测节约装置管线80内的制冷剂的温度。节约装置管线80中的温度和节约装置管线80内的压力可以帮助向控制器400提供过热读数的指示,并且控制器400可以配置成响应于节约装置管线80内的温度和压力而调节节约装置返回电子膨胀阀300。膨胀控制流入管线202连接到球阀接合点208,所述球阀接合点208配置成将主流动路径54分为膨胀阀管线204和球阀管线206。膨胀阀管线204从球阀接合点208延伸到蒸发器接合点212。球阀管线206从球阀接合点208延伸到蒸发器接合点212。蒸发器接合点212将膨胀控制系统200流体连接到蒸发器88。蒸发器流入管线214将蒸发器接合点212连接到蒸发器88的入口90。蒸发器接合点212配置成将膨胀阀管线204和球阀管线206组合为主流动路径54或蒸发器流入管线214。
36.膨胀控制系统200可以位于节约装置接合点96和蒸发器接合点212之间。膨胀控制系统200包括一个或多个电子膨胀阀220和调制的球阀240。电子膨胀阀220位于膨胀阀管线204中,并且调制的球阀240位于球阀管线206中。理解的是,虽然仅图示一个电子膨胀阀220,但本文描述的实施例适用于具有任何数量的电子膨胀阀220的蒸汽压缩系统20,并且每个电子膨胀阀220可以位于其自己的膨胀阀管线204中。此外,电子膨胀阀220可以被定向成平行于所利用的其它电子膨胀阀并且还平行于调制的球阀240。在实施例中,可以利用两个电子膨胀阀220。
37.蒸汽压缩系统20可以配置成使用电子膨胀阀220以作为用于正常操作的主或仅计量装置,而调制的球阀240保持在关闭位置中,因此阻挡通过球阀管线206的制冷剂流。
38.然而,由于电子膨胀阀220的有限尺寸,蒸汽压缩系统20在更低的扬程或在喘振期间可能不能实现100%的容量。
39.低扬程可以被描述为当离开冷凝器58的冷却水的温度与离开蒸发器88的冷却水的温度之间的差在9
°
f以内时。
40.喘振是当跨压缩机的压力差为高但负载更小时离心式压缩机上的现象。在这种情况下,制冷剂流可开始在相反方向上通过压缩机58从冷凝器58行进到蒸发器88。电子膨胀
阀220单独响应喘振是慢的。为了快响应喘振,调制的球阀240可以跨电子膨胀阀220打开。
41.调制的球阀240可足以作为在喘振期间用来调节制冷剂流的唯一膨胀阀。这是因为在喘振期间,过冷器65排出液体制冷剂,并且存在也与液体制冷剂一起离开冷凝器58的大量的蒸汽制冷剂。在喘振期间,这种大量的蒸汽可阻塞电子膨胀阀220。因此,在喘振期间,电子膨胀阀220的运动被控制器冻结,并且调制的球阀240接管操作并管理制冷剂流,直到压缩机22摆脱喘振。跨电子膨胀阀220的调制的球阀240类似于热气旁路操作,并在系统上引入人工负载,因此压缩机22可以在更高负载下运行并摆脱喘振。
42.调制的球阀240可作为热气操作以实现低负载。低负载可以被认为是在任何扬程小于蒸汽压缩系统20负载的20%。通常,蒸汽压缩系统20通过降低压缩机22的速度而卸载。然后,当压缩机22达到最小速度时,负载通过入口导向叶片阵列44,55进一步减小。然后,当入口导向叶片阵列44,55处于最小值时,电子膨胀阀220被冻结并且调制的球阀240被打开。这导致液体制冷剂从过冷器65排出,并产生与热气旁路相同的状况。这进一步降低冷却负载。
43.调制的球阀240配置成有助于蒸汽压缩系统20在更低扬程中实现100%的容量。调制的球阀240位于与电子膨胀阀220平行的制冷剂流动路径中。有利地,调制的球阀240增加主流动路径54的大流量,这由于这样的大尺寸电子膨胀阀的不可用性而单独通过电子膨胀阀是不可能的。调制的球阀240配置成提供粗制冷剂流控制,而电子膨胀阀220构造成提供精流控制。粗流控制可以被定义为意味着调制球阀240配置成以限定百分比增量关闭和打开,但是可能不能打开到设定的限定百分比打开增量之间的百分比。例如,调制的球阀240可具有11个设定位置,包括0%打开(即关闭)、10%打开、20%打开、30%打开、40%打开、50%打开、60%打开、70%打开、80%打开、90%打开和100%打开。但是调制的球阀240可能不能在0%打开-10%打开之间,在10%打开-20%打开之间,在20%打开-30%打开之间,在30%打开-40%打开之间,在40%打开-50%打开之间,在50%打开-60%打开之间,在60%打开-70%打开之间,在70%打开-80%打开之间,在80%打开-90%打开之间或在90打开-100%打开之间打开。在另一个示例中,调制的球阀240可具有21个设定位置,包括0%打开(即关闭)、5%打开、10%打开、15%打开、20%打开、25%打开、30%打开、35%打开、40%打开、45%打开、50%打开、55%打开、60%打开、65%打开、70%打开、75%打开、80%打开、85%打开、90%打开、95%打开和100%打开。理解的是,这里用于调制的球阀240的设定的限定百分比打开增量位置的值本质上是示范性的,且调制的球阀240可具有不同的设定的限定百分比打开增量位置,或多或少的设定的限定百分比打开增量位置,或设定的限定百分比打开增量位置之间的不同增量。精流控制可定义为能够实现0%打开-100%打开之间的打开位置。换言之,电子膨胀阀220配置成关闭和打开到完全打开与完全关闭之间的任何位置。
44.在从第一设定的限定百分比打开增量位置到第二设定的限定百分比打开增量位置的跳跃之间可能存在时间间隙。例如,时间间隙可以是大约60秒。此外,在第一设定的限定百分比打开增量位置与第二设定的限定百分比打开增量位置之间的跳跃可以仅在电子膨胀阀220高于选定百分比打开位置最大阈值时发生。
45.例如,电子膨胀阀220可以具有30%打开的选定百分比打开位置最小阈值和80%打开的选定百分比打开位置最大阈值。然后,如果电子膨胀阀220继续保持在80%以上开
口,则可允许调制的球阀240每60秒打开5%。如果调制的球阀240打开到大约40%打开并且电子膨胀阀220低于80%打开,则调制的球阀240冻结,直到电子膨胀阀220下降低于30%打开。一旦电子膨胀阀220下降低于30%打开,则调制的球阀240开始每60秒关闭5%。然而,电子膨胀阀220超过30%打开,则调制的球阀240将冻结。
46.调制的球阀240配置成当电子膨胀阀220可以接近最大开口时在低扬程操作中以限定百分比增量的步长(step)打开以作为对电子膨胀阀220的增大,这有利地增加制冷剂流并且允许更高的容量。电子膨胀阀220配置成执行精控制以便在调制的球阀240以所述步长打开的同时维持平滑操作。精控制可以进一步限定为具有多个小步长,并且与调制的球阀240的少且大步长相比。例如,电子膨胀阀220可以具有约3000个步长并且每个步长变化可以是0.03%打开,这可以连续地变化。这与调制的球阀240相反,所述调制的球阀240可以具有以5%打开或10%打开的增量的步长,并且可以每60秒变化一次而不连续。
47.调制的球阀240配置成以限定百分比增量的步长打开,以作为对电子膨胀阀220的增大,以快响应冷却器喘振控制,这有利地改变压缩机22的质量流以将其置于更稳定的操作状态中。
48.在蒸汽压缩系统20的实施例中,控制系统包括控制器400和与各种制冷剂管线操作地相关联的多个流控制装置。
49.控制器400可以是包括处理器420和相关联的存储器410的电子控制器,所述存储器410包括计算机可执行指令(即,计算机程序产品),其当由处理器420执行时,使处理器420执行各种操作。处理器420可以是但不限于各种各样可能架构中的任何的单处理器或多处理器系统,包括被同质或异质布置的现场可编程门阵列(fpga)、中央处理单元(cpu)、专用集成电路(asic)、数字信号处理器(dsp)或图形处理单元(gpu)硬件。存储器410可以是但不限于随机存取存储器(ram)、只读存储器(rom)或其它电子、光、磁或任何其它计算机可读介质。
50.在操作中,控制器400选择性地控制多个流控制装置中的每个在其相应的打开和关闭位置之间的定位,以通过各种制冷剂管线选择性地引导制冷剂流。多个流控制装置至少包括电子膨胀阀220和调制的球阀240。
51.控制器400配置成控制电子膨胀阀220和调制的球阀240的操作。控制器400还可以通过操作地与控制器400相关联并且设置在贯穿系统的选定位置处的各种传感器来监测各种操作参数。例如,在图1中所描绘的实施例中,提供温度传感器503和压力传感器504以分别感测制冷剂吸入温度和压力,并且提供温度传感器505和压力传感器506以分别感测制冷剂排出温度和压力。压力传感器504,506可以是常规的压力传感器,例如比如压力换能器,而温度传感器503和505可以是常规的温度传感器,例如比如热电偶或热敏电阻。
52.还可以存在可操作地连接到冷凝器58的液体传感器520。如果在冷凝器58中液位上升,则电子膨胀阀220打开,并且如果在冷凝器58中液位下降,则电子膨胀阀220关闭。目标液位可以根据条件而变化。还可以使用入口导向叶片阵列44,55的百分比开口、压缩机22的速度以及蒸发器88和冷凝器58的压力来控制电子膨胀阀220和调制球阀240。
53.主流动路径54通过蒸发器流入管线214向下游前进到蒸发器88。在正常操作模式中,蒸发器88是吸热热交换器。在所图示的冷却器实现中,蒸发器88是制冷剂-水热交换器,其可具有容器和管束构造,其中管束承载在正常操作模式下被冷却的水或其它液体。蒸发
器88包括用于水流或其它传热流体流的传热流体入口87和传热流体出口89。蒸发器88具有连接到吸入管线94的主出口92,所述吸入管线94完成返回到入口40的主流动路径54。
54.示出从主流道54分支出来并返回到主流道54的若干附加的可选流动路径和相关联的管道以及其它硬件。除了节约装置流动路径84之外,过冷器或马达冷却流动路径100也从主流道54分支出来并返回到主流道54。马达冷却流动路径100包括从贮槽64上的端口104处的上游端延伸的管线102。管线102延伸到压缩机22上的冷却端口106。马达冷却流动路径100通过冷却端口106进入压缩机22的马达箱34中。在马达箱34中,冷却流冷却定子30和转子32,并且然后离开排出口108。沿着马达冷却流动路径100,马达冷却返回管线109从排出口108返回到主流动路径54。在这个示例中,其返回到蒸发器88的容器上的端口110。
55.整个循环制冷剂混合物可以是为本领域技术人员已知的任何制冷剂。
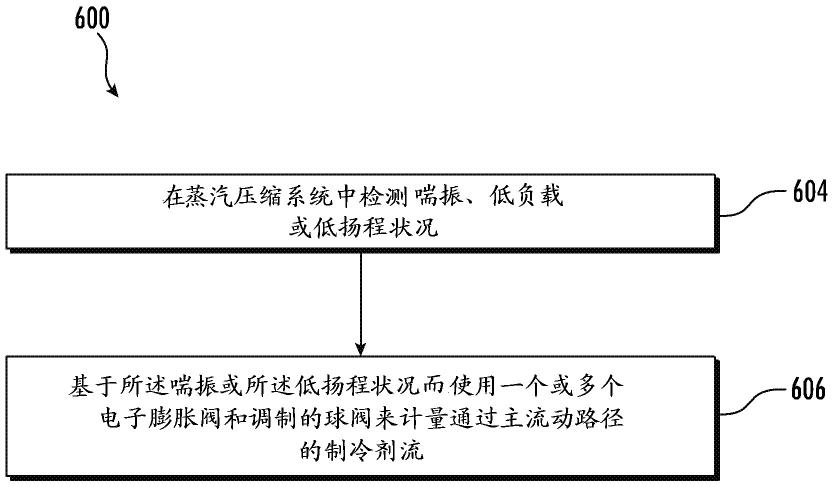
56.现在还参考图2,其示出图示操作图1的蒸汽压缩系统20的方法600的流程图。在实施例中,方法600可以由控制器400执行和/或控制。
57.在框604处,在蒸汽压缩系统20中检测喘振、低负载或低扬程状况。
58.喘振和喘振阶段可以通过复杂的算法检测,所述算法考虑使用压力传感器504的来自蒸发器88的压力传感器读数和使用压力传感器506的来自冷凝器58的压力传感器读数。然后,控制器400还可以使用压缩机22的速度和入口导向叶片阵列44,55的开口尺寸、来自蒸发器88的水的温度临时确定如何处置喘振。
59.首先,控制器400可以通过控制压缩机22的速度和入口导向叶片阵列44,55的开口尺寸来试图减轻喘振而不进入喘振。如果这行不通的话,则控制器400可打开调制的球阀44并冻结一个或多个电子膨胀阀220以改变压缩机负载来控制喘振。当一个或多个电子膨胀阀220打开到高阈值时,可以检测低扬程状况。
60.当压缩机22的速度最小化,入口导向叶片阵列44,55处于其最低设定并且冷却器仍然具有比期望的冷却容量更多的冷却容量时,可以检测低负载状况。在这种情况下,控制器400打开调制的球阀240以通过旁路热气而进一步减小负载。
61.在框606处,基于喘振、低负载或低扬程状况而使用一个或多个电子膨胀阀220和调制的球阀240来计量通过主流动路径54的制冷剂流。框606可以还包括一个或多个电子膨胀阀220执行制冷剂通过主流动路径54的精流控制并且调制的球阀240执行制冷剂通过主流动路径54的粗流控制。制冷剂的精流控制可以由一个或多个电子膨胀阀220通过将一个或多个电子膨胀阀220调节到完全打开与完全关闭之间的任何位置来执行。制冷剂的粗流控制可以由调制的球阀240通过将调制的球阀240调节到一个或多个设定的限定百分比打开增量位置来执行。
62.调制的球阀240和一个或多个电子膨胀阀220在蒸汽压缩系统20的冷凝器58和蒸发器88之间的主流动路径54上位于膨胀控制系统200中。
63.方法600可以还包括框604,使用一个或多个电子膨胀阀220而不是调制的球阀240来计量通过主流动路径54的制冷剂流。如前所述,蒸汽压缩系统20可将一个或多个电子膨胀阀220用于正常操作,而不使用调制的球阀240。
64.虽然以上描述按照特定顺序描述了图2的流程过程,但是应当领会,除非所附权利要求书中另有特定地要求,否则可改变步骤的排序。
65.如上面所述,实施例可采用处理器实现的过程和用于实践那些过程的装置(诸如
处理器)的形式。实施例还可采用含有体现在有形介质(诸如软盘、cd rom、硬驱动器或任何其它非暂时计算机可读介质)中的指令的计算机程序代码的形式,其中,当计算机程序代码被加载到计算机中并由计算机运行时,计算机变成用于实践实施例的装置。实施例还可采用例如下列的形式:无论是存储在存储介质中、加载到计算机中和/或由计算机运行的计算机程序代码,还是通过一些传输介质传送、加载到计算机中和/或由计算机运行的计算机程序代码,又或者是通过一些传输介质(诸如通过电线或电缆、通过光纤(fiber optics)、或经由电磁辐射)传送的计算机程序代码;其中,当计算机程序代码被加载到计算机中并由计算机运行时,计算机变成用于实践示范性实施例的装置。当在通用微处理器上实现时,计算机程序代码段配置微处理器以创建特定的逻辑电路。
66.术语“大约”旨在包括与基于提交申请时可用的设备的特定量的测量相关联的误差程度。例如,“大约”能够包括给定值的
±
8%或5%或者2%的范围。
67.本文中使用的术语仅用于描述特定实施例的目的,并不旨在成为本公开的限制。如本文中所使用的,单数形式“一(a/an)”和“该(the)”旨在也包括复数形式,除非上下文另有清楚地指示。将进一步理解的是,术语“包括(comprises和/或comprising)”当在本说明书中使用时规定所陈述的特征、整数、步骤、操作、元件和/或组件的存在,但不排除一个或多个其它特征、整数、步骤、操作、元件组件和/或其群组的存在或添加。
68.虽然参照一个或多个示范实施例描述了本公开,但是本领域中的技术人员将会理解,可进行各种改变,并且等效方案可代替其元件,而没有背离本公开的范围。另外,可进行多种修改以使特定状况或材料适合本公开的教导,而没有背离其实质范围。因此,旨在的是本公开并不局限于作为执行本公开所考虑的最佳模式所公开的特定实施例,本公开而是将包括落入权利要求书的范围之内的全部实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1