用于食物废物分解的系统和方法与流程
[0001]
实施例总体上涉及与食物废物处理有关的系统、方法、机械、和过程,具体地涉及此类食物废物的分解。
背景技术:
[0002]
食物废物在很多地区都是个问题。未使用的或浪费的食物不仅与成本相关,而且此类废物可能与显著的经济或环境影响相关。许多旅馆、餐馆和超市或农产品市场必须每天面临食物废物的处置。类似地,海鲜、家禽或肉类加工厂等食品加工厂、水果和蔬菜加工厂也可能产生必须加以处置的有机的动物和/或蔬菜废物。这可能涉及将废物临时存储在经营处所内或附近,这会占用空间、可能导致难闻的气味并且可能吸引害虫。替代性地,可以将食物废物从经营处所运走,但这会产生额外的经营成本,并将处置任务转移给另一方。
[0003]
有一些机器可以处理食物废物。然而,一些这样的机器通过将食物废物物理地破碎同时将其加热以“烹煮”或使其变性,来处理食物废物。这种加热典型地在超过100摄氏度的高温下完成。这样的加热需要大量能量,并且这样的机器的功率消耗可能代表显著的成本。另外,这样的机器可能花费相对长的时间,例如几天,来将食物废物处理成可以被有效处置的形式。
[0004]
期望解决或减轻与食物废物处理的现有技术相关的一个或多个不足或缺点、或者至少提供其有用的替代方案。
技术实现要素:
[0005]
一些实施例涉及一种用于食物废物处理的机器,包括:电源;耦合至该电源的控制系统;混合滚筒,该混合滚筒限定了混合腔室并且具有2000升或更小的体积容量;混合轴,该混合轴具有从该混合轴延伸的混合叶片,该混合轴被配置为用于旋转以使该混合叶片在该混合腔室内移动;电离器,该电离器耦合至该电源并且被布置为用于富含活性氧物质的空气源;加热器与风扇,该加热器与风扇耦合至该电源并且被布置为用于接收该空气源,该加热器与风扇协作向该混合腔室提供富含电离氧的经加热气体源,其中,该经加热气体在约50℃与70℃之间,和/或其中,该处理滚筒中的环境被加热至维持在50℃至70℃范围内的温度;马达,该马达被布置为用于从该电源汲取功率并驱使该混合轴旋转;其中,该混合滚筒限定了用于接收食物废物的输入孔、和用于将经处理的废物残渣排出的出口;其中,该控制系统被配置为用于操作该马达来驱动该混合轴而持续多个小时,同时监测该机器的操作参数以产生经处理的废物残渣,可选地其中,该残渣包括基本上干燥和/或
惰性颗粒、或大致由其组成。
[0006]
该控制系统可以被配置为用于监测该马达的功率汲取、并且确定该马达的峰值功率汲取时间。
[0007]
该控制系统可以被配置为用于基于一个或多个过程完成条件来确定该经处理的废物残渣准备好从该出口排出。
[0008]
该一个或多个完成条件可以包括在该峰值功率汲取时间之后过去的预定时间。该预定时间可以在例如约4小时至约7小时之间。
[0009]
该机器可以包括用于感测该混合腔室内的湿度的湿度传感器,并且其中,该一个或多个完成条件包括该混合腔室内的湿度水平低于湿度阈值。
[0010]
该机器可以包括用于感测该混合腔室内或该混合滚筒的排放出口处的空气温度的温度传感器,并且其中,该一个或多个完成条件包括该温度传感器所感测到的温度水平在预定温度范围内。
[0011]
该出口可以设置在该滚筒的外壁中、在该混合轴的位置的竖直上方的位置处。
[0012]
该混合轴可以具有与其耦合的至少一个铲子,该至少一个铲子被配置为用于将经处理的废物残渣带到该出口的位置。
[0013]
该控制系统可以被配置为响应于确定该经处理的废物残渣准备好排出而自动开始该经处理的废物残渣的排出。
[0014]
该控制系统可以在排出期间监测该滚筒的重量以监测所排出残渣的重量、并且确定该滚筒中剩余的残渣重量,其中,该控制系统被配置为在该滚筒中剩余的残渣重量达到预定最小阈值水平时停止经处理的废物残渣的排出,其中在排出停止之后,至少20kg的量的经处理的废物残渣留在该滚筒中;可选地在排出停止之后,至少50kg的经处理的废物残渣量留在该滚筒中;可选地在排出停止之后,至少100kg的经处理的废物残渣量留在该滚筒中。
[0015]
一些实施例涉及一种使食物废物快速分解的过程,包括:将一批食物废物装载到由废物处理机器的处理滚筒限定的处理腔室中,该废物处理机器包括轴和多个叶片,该多个叶片耦合至该轴并且背离该轴延伸;使该轴旋转以使该叶片破碎存在于该处理滚筒中的食物废物;在该轴旋转的同时向该处理滚筒中供应经加热的空气,其中,该处理滚筒内的环境被加热至50至70摄氏度范围内的温度,和/或其中,该经加热的空气以在约50至约70摄氏度之间的温度被供应,其中,该经加热的空气富含自由基氧和/或电离氧;从该滚筒中抽出空气以从该滚筒中去除空气中的水分;在该轴旋转的同时监测与该处理滚筒有关的处理条件;确定该处理条件满足处理完成指标;以及从该处理腔室中去除经处理的食物废物的残渣。
[0016]
可以控制该去除以在该处理滚筒中留下最小重量的残渣。
[0017]
该去除可以包括将该残渣传输至该滚筒的端壁中的舱口中。
[0018]
该残渣的最小重量可以被确定为大于:在将该批食物废物装载到该处理滚筒中时该滚筒中的有机材料的总重量的预定百分比;或预设最小重量。
[0019]
该舱口可以设置在该轴的高度的竖直上方的高度处。该传输可以包括将该残渣升高至该舱口的高度。该传输可以包括使用至少一个该叶片来将残渣铲送到该舱口中。
[0020]
该处理条件可以包括以下中的至少一者:驱动该轴的马达的功率汲取;该处理腔室内的空气温度;该处理腔室内的空气湿度;从最后一批食物废物被装载到该处理腔室中起过去的时间;该处理腔室内的残渣的当前重量相对于在最近一批食物废物被装载到该处理腔室中时所装载的食物废物的起始重量;所装载的食物废物的重量减小百分比。
[0021]
该过程可以进一步包括监测驱动该轴旋转的马达的随时间推移的功率汲取,以确定在处理时间段上的峰值功率汲取时间。
[0022]
所述监测功率汲取可以包括将该处理时间段的开始时间设定为最近一批食物废物被装载到该处理腔室内的时间。
[0023]
该过程进一步包括响应于确定另外一批食物废物已经装载到该处理腔室中,来重设该处理时间段的开始时间。
[0024]
该过程可以进一步包括监测该废物处理机器的装载舱口的打开或关闭状态。
[0025]
该过程可以进一步包括监测耦合至该处理滚筒的负载传感器的输出,以确定装载到该处理腔室中的该批食物废物的重量。
[0026]
去除该残渣可以包括继续使该轴旋转并且中断经加热的空气的供应。
[0027]
当该完成指标被满足时,所装载的这批食物废物的重量可以减少约50%至90%之间、可选地减少约60%至90%之间、可选地减少约70%至约90%之间。
[0028]
当该完成指标被满足时,该残渣的水分含量可以为约30%或更小、可选地在约30%至约10%之间。
[0029]
一些实施例涉及一种食物废物处理系统,包括:食物废物处理机器,该食物废物处理机器包括装载舱口、处理滚筒、和出口舱口;装载机,该装载机用于接纳有待装载到该食物废物处理机器中的食物废物箱并且操纵该箱来将该食物废物穿过该装载舱口装载到该处理滚筒中;读取器,该读取器设置在该食物废物处理机器或该装载机上或与之相邻、并且被布置为用于从该箱上的或其携带的机器可读元件上读取独特标识符;控制器,该控制器用于控制该食物废物处理机器和该装载机的操作、并且用于接收该读取器的输出,其中,该控制器被配置为用于基于该读取器的输出来确定该独特标识符、并且将该独特标识符发送至服务器以能够跟踪该废物处理机器的使用。
[0030]
一些实施例涉及一种废物处理的方法,包括:将一批食物废物负载接收到处理滚筒中;使该处理滚筒操作一段时间段,并且在该操作期间,将该食物废物物理地破碎、曝气并升温,其中,该升温包括将该处理滚筒内的环境加热至小于100℃的温度、并且包括从该环境中去除水分,并且其中,该曝气包括将富含自由基氧和/或电离氧的空气吹到该食物废物上;确定该处理滚筒中的处理条件被满足以完成该处理滚筒的操作;从该处理滚筒中去除食物废物残渣,同时在该处理滚筒中留下至少50kg的残渣。
[0031]
一些实施例涉及一种废物处理的方法,包括:将一批食物废物负载接收到处理滚筒中;
将来自前一批食物废物负载的处理中的一定量的食物废物残渣引入该处理滚筒中;使该处理滚筒操作一段时间段,并且在该操作期间,将该食物废物物理地破碎、曝气并升温,其中,该升温包括将该处理滚筒内的环境加热至小于100℃的温度、并且包括从该环境中去除水分,并且其中,该曝气包括将富含自由基氧和/或电离氧的空气吹到该食物废物上;监测该处理滚筒的操作;基于该监测来确定该处理滚筒中的处理条件被满足以完成该处理滚筒的操作;从该处理滚筒中去除食物废物的残渣。
[0032]
可以执行该去除,同时在该处理滚筒中留下约200kg至约50kg的残渣。该确定可以包括:确定驱动在该处理滚筒内旋转的混合轴的马达的峰值功率汲取时间,并且确定从该峰值功率汲取时间起已经过去的预定时间段。该预定时间段可以是在约4小时至12小时范围内的选定时间段。该选定时间段可以在约4小时至7小时的范围内。
[0033]
该方法可以进一步包括将去除的残渣引入厌氧消化池。
[0034]
可以将该处理滚筒内的环境加热以在该处理滚筒内实现在50至70℃范围内的目标温度。该目标温度可以为例如约60℃。
[0035]
该确定可以包括:确定从该处理滚筒的峰值功率汲取时间起已经过去的预定时间。
[0036]
一些实施例涉及一种废物处理系统,该废物处理系统包括具有出口舱口的处理滚筒,其中,该出口舱口被配置为用于在打开时将空气流沿着该舱口的上表面引导以促进经处理废物穿过该舱口排出。
[0037]
一些实施例涉及一种废物处理系统,包括:出口舱口,该出口舱口在处理滚筒的出口端处,该出口舱口被定位在该滚筒中的处理轴的高度上方、并且具有出口,该出口用于将穿过该舱口的经处理废物朝向收集箱向下引导;以及高度传感器,该高度传感器被定位成用于在该收集箱被定位在该出口舱口的出口下方时检测该收集箱中的废物残渣的高度。
[0038]
该系统可以进一步包括位置传感器,该位置传感器位于该处理滚筒的出口端处或附近、并且被布置为用于检测在该出口舱口的出口下方存在或不存在该收集箱。
[0039]
一些实施例涉及一种废物处理滚筒,该废物处理滚筒包括:混合器,该混合器用于在该滚筒内围绕水平轴线旋转;在该滚筒的弯曲下侧壁中的一系列水平延伸的孔;空气引导件或罩,用于将穿过这些孔的空气沿着该侧壁向下引导到该滚筒中。
[0040]
这些空气引导件或罩具有小轮廓,以避免伸入该滚筒内部超过约30mm、可选地约20mm。
[0041]
一些实施例涉及一种有机废物处理机器,该有机废物处理机器包括:控制器;处理滚筒,该处理滚筒包括搅拌器;加热器;第一风扇,该第一风扇响应于该控制器来迫使空气穿过该加热器并且将经加热的空气
递送至该处理滚筒;第二风扇,该第二风扇响应于该控制器来从该处理滚筒中排出空气;其中,该控制器控制该第一风扇和第二风扇,以在该处理滚筒中相对于该处理滚筒外部的环境压力引起负压。
[0042]
该机器可以进一步包括电离器,该电离器用于用环境空气来生成富含电离氧的空气流,其中,被该第一风扇迫使穿过该加热器的空气是该富含电离氧的空气流。该负压可以为至少0.01毫巴。
[0043]
一些实施例涉及一种操作废物处理机器的方法,该方法包括:操作该废物处理机器的处理滚筒;使环境空气穿过电离器以生成富含电离氧的空气源,并且将该富含电离氧的空气源供应到该处理滚筒中;确定将从该处理滚筒中卸载经处理的废物残渣;控制该电离器停止生成该富含电离氧的空气源;将环境空气从该电离器转向至邻近于该处理滚筒的出口的气刀,以辅助穿过该出口来卸载废物残渣。
[0044]
该气刀可以设置在位于该处理滚筒的出口处的舱口中。该方法可以进一步以包括打开该舱口并且将来自该处理滚筒的废物残渣穿过该舱口传输到设置在该舱口下方的废物箱中。该确定可以包括:确定驱动在该处理滚筒内旋转的混合轴的马达的峰值功率汲取时间,并且确定从该峰值功率汲取时间起已经过去的预定时间段。该预定时间段可以是在约4小时至12小时范围内的选定时间段。该选定时间段可以在约4小时至7小时的范围内。
[0045]
一些实施例涉及一种废物处理滚筒,该废物处理滚筒包括:圆柱形壁以及相反的第一和第二端壁,用于限定除了以下之外基本上封闭的圆柱形处理腔室:废物进入开口、被定位成低于该废物进入开口的至少一个侧向延伸的空气入口孔和被定位成低于该废物进入开口的至少一个侧向延伸的空气入口孔、以及被定位成高于该废物进入开口的至少一个侧向延伸的空气排放孔。
[0046]
该至少一个排放孔可以包括跨越该滚筒的侧向长度的60-95%之间长度的多个排放孔。该至少一个空气入口孔可以包括跨越该滚筒的侧向长度的50-80%或60-90%之间长度的多个空气入口孔。
[0047][0048]
一些实施例涉及一种有机废物处理机器,该有机废物处理机器包括上文描述的废物处理滚筒。
附图说明
[0049]
图1是根据一些实施例的包括一个或多个废物处理机器的分布式废物处理系统的框图;
[0050]
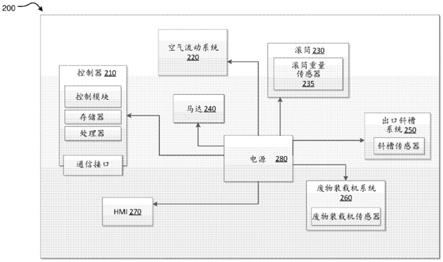
图2是根据一些实施例的废物处理机器的电源布置的框图;
[0051]
图3是根据一些实施例的废物处理机器的控制与通信布置的框图;
[0052]
图4是根据一些实施例的废物处理机器的空气流动系统的框图;
[0053]
图5a是根据一些实施例的包括废物装载机系统的废物处理机器的前立面视图;
[0054]
图5b是包括废物装载机系统的废物处理机器的侧立面视图;
[0055]
图5c是图5a和图5b所示的废物处理机器的俯视图;
[0056]
图6是废物处理机器沿着图5a的截面线a-a的截面视图;
[0057]
图7是废物处理机器沿着图5b的截面线b-b的部分截面视图;
[0058]
图8是废物处理机器沿着图5b的截面线c-c的截面视图;
[0059]
图9a是根据一些实施例的废物处理机器的透视图,废物装载机系统未示出;
[0060]
图9b是图9a的废物处理机器的侧视图;
[0061]
图9c是图9a的废物处理机器的前视图;
[0062]
图9d是图9a的废物处理机器的俯视图;
[0063]
图10a是图9a的废物处理机器的部分内部的透视图;
[0064]
图10b是图9a的废物处理机器的部分内部的侧视图;
[0065]
图10c是图9a的废物处理机器的部分内部的前视图;
[0066]
图10d是图9a的废物处理机器的部分内部的俯视图;
[0067]
图11a是图9a的废物处理机器的废物处理机器滚筒的透视图;
[0068]
图11b是图9a的废物处理机器的废物处理机器滚筒的侧视图;
[0069]
图12a是根据一些实施例的废物处理机器的出口斜槽系统的前视图,示出了出口舱口处于关闭位置;
[0070]
图12b是图12a的出口斜槽系统的侧视图,示出了出口舱口处于关闭位置;
[0071]
图13a是图12a的出口斜槽系统的前视图,示出了出口舱口处于打开位置;
[0072]
图13b是图12a的出口斜槽系统的侧视图,示出了出口舱口处于打开位置;
[0073]
图13c是图12a的出口斜槽系统的分解透视图;
[0074]
图13d是图12a的出口舱口的分解透视图;
[0075]
图14是废物处理混合器的前视图;
[0076]
图15是图14的废物处理混合器的第一端视图;
[0077]
图16是图14的废物处理混合器的第二(相反)端视图;
[0078]
图17是根据一些实施例的废物处理机器入口舱口的截面侧视图;
[0079]
图18是根据一些实施例的电气原理图,展示了废物处理机器的功率分布;
[0080]
图19是废物处理机器内的安全电路的电气原理图;
[0081]
图20是废物处理机器内的滚筒驱动电路的电气原理图;
[0082]
图21是废物处理机器内的入口风扇驱动电路的电气原理图;
[0083]
图22是废物处理机器内的出口风扇驱动电路的电气原理图;
[0084]
图23是向废物处理机器内的电离器和测压元件供电的电路的电气原理图;
[0085]
图24是废物处理机器上的机器按钮的电路的电气原理图;
[0086]
图25是废物处理机器内的传感器的电路的电气原理图;
[0087]
图26是将废物处理控制器连接至废物处理机器的部件上的电路的电气原理图;
[0088]
图27是将hmi连接至废物处理机器的部件上的电路的电气原理图;
[0089]
图28是将出口致动器连接至电源和控制器以接收输入命令的电路的电气原理图;
[0090]
图29是将空气流动系统的加热器连接至电源和控制器的电路的电气原理图;
[0091]
图30是将维修舱口安全开关连接至安全电路的电路的电气原理图;
[0092]
图31是连接废物装载机系统的液压马达和螺线管的电路的电气原理图;
[0093]
图32是连接废物装载机系统的入口舱口致动器控制器的电路的电气原理图;
[0094]
图33是连接废物装载机系统的入口舱口致动器的电路的电气原理图;
[0095]
图34a是根据一些替代性实施例的废物处理机器的后视透视截面视图;
[0096]
图34b是图34a的废物处理机器的前视图;
[0097]
图34c是图34a的废物处理机器的侧视图;
[0098]
图34d是图34a的废物处理机器的前视截面视图;
[0099]
图34e是图34a的废物处理机器的前视透视图;
[0100]
图35是流程图,展示了根据一些实施例的用于操作废物处理机器的方法;
[0101]
图36是流程图,展示了根据一些实施例的用于识别废物卸载触发的过程;
[0102]
图37是根据一些实施例的废物卸载过程的流程图;
[0103]
图38是根据一些实施例的示例性用户接口显示图像的截图,展示了具有导航选项的主菜单和由废物处理机器的控制器监测的各个传感器数据的显示;
[0104]
图39是用于空气流动系统中的加热器的配置菜单的示例性用户接口显示图像的截图;
[0105]
图40是卸载配置菜单的示例性用户接口显示图像的截图;
[0106]
图41是装载机配置菜单的示例性用户接口显示图像的截图;
[0107]
图42是重量校准菜单的示例性用户接口显示图像的截图;
[0108]
图43是压力校准菜单的示例性用户接口显示图像的截图;
[0109]
图44是卸载舱口配置菜单的示例性用户接口显示图像的截图;
[0110]
图45是重量变化显示菜单的示例性用户接口显示图像的截图;
[0111]
图46是废物处理机器的各个部件的功率消耗显示的示例性用户接口显示图像的截图;
[0112]
图47是图形显示的示例性用户接口显示图像的截图,展示了在至少一个处理周期上记录的废物处理机器的当前和历史操作参数;
[0113]
图48是端视图的示意性表示,展示了废物负载在废物处理机器的处理腔室内的典型位置(接近处理周期结束);
[0114]
图49a是出口舱口处于打开位置并且其中残渣铲子处于沉积位置时从处理腔室内部看到的部分视图;
[0115]
图49b是出口舱口处于打开位置并且其中残渣铲子处于沉积位置时从处理腔室内部看到的侧视图;
[0116]
图49c是出口舱口处于打开位置并且其中残渣铲子处于沉积位置时从处理腔室内部看到的俯视图;
[0117]
图50是根据一些实施例的废物处理机器的混合部件的部分透视图,示出了这些部件的相对位置,其中出口舱口处于打开位置并且其中残渣铲子处于沉积位置,以展示处理腔室的卸载;
[0118]
图51a是废物处理混合器的前视图;
[0119]
图51b是废物处理混合器的截面前视图;
[0120]
图51c是第一混合叶片固定件的侧视图;
[0121]
图51d是第二混合叶片固定件的侧视图;
[0122]
图51e是第三混合叶片固定件的侧视图;
[0123]
图52a是空气流入气室的前视图;
[0124]
图52b是空气流入气室的分解透视图;
[0125]
图52c是空气流入气室的透视图;
[0126]
图52d是空气流入气室的截面俯视图;
[0127]
图52e是空气流入气室的侧视图;
[0128]
图53a是废物处理腔室内的空气入口遮挡件的透视图;
[0129]
图53b是空气入口罩的侧视图;
[0130]
图53c是空气入口罩的前视图;
[0131]
图53d是空气入口罩的俯视图;
[0132]
图54a是排放出口组件的透视图;
[0133]
图54b是排放出口组件的分解透视图;
[0134]
图54c是排放出口组件的截面侧视图;
[0135]
图54d是排放出口组件的截面俯视图;
[0136]
图55是根据一些实施例的示例性用户接口显示图像,展示了具有导航选项的主菜单和由废物处理机器的控制器监测的各个传感器数据的显示;
[0137]
图56是流程图,展示了根据一些实施例的用于控制废物处理机器的电离器的方法;
[0138]
图57a是根据一些实施例的废物处理腔室滚筒本体的透视图;
[0139]
图57b是根据一些实施例的废物处理腔室滚筒本体的展开的平面视图;以及
[0140]
图58是端视图的示意性表示,展示了刮杆和空气排放出口在废物处理机器的处理腔室内的典型位置。
具体实施方式
[0141]
实施例总体上涉及与食物废物处理有关的系统、方法、机械、和过程,具体地涉及此类食物废物的分解。特定的实施例采用混合元件,比如包括从其伸出的多个混合叶片或处理叶片的轴,该混合元件在放置有食物废物的处理腔室内旋转。这样的实施例通过混合元件的机械动作结合经加热空气源来随时间将食物废物破碎。在一些实施例中,经加热空气被加热至具有大约50至70℃的温度。例如,这样的经加热空气富含电离氧、比如自由基氧。
[0142]
实施例还涉及允许对废物处理机器进行使用跟踪的食物废物处理系统。此类实施例包括读取器,该读取器设置在食物废物处理机器或废物装载机上或与之相邻、并且被布置用于读取用来将废物装载到废物处理机器中的废物装载箱上的或其携带的机器可读元件的独特标识符。
[0143]
本文描述的废物处理机器适于对废物源现场进行有机(包括食物在内)废物处理。例如,此类机器可以位于例如旅馆场所、美食区附近或在养鸡场、渔业或屠宰场场所,从而不需要立即将有机废物运送至另一场地进行处置。本文描述的废物处理机器被配置为用于在少于24小时的时间上处理废物以减小废物的重量和体积、并且产生相对干燥且易于处置
的废物残渣。例如,被装载到机器中的有机材料的原始体积可以被减小至少50%至60%、并且至多可达约80%。所得残渣是无害的或不会串味、并且可以在干燥环境内长时间存放而不腐坏。
[0144]
所描述的实施例可以帮助:降低与食物和废物管理相关联的成本;减小对温室气体排放的贡献;通过消除或避免废物腐坏(可能会吸引害虫和昆虫)而改善场地的清洁度和安全性;减少与食物和有机废物存放相关联的气味;以及减少现场所需的收集箱的数量。
[0145]
图1是分布式废物处理系统100的框图。该分布式废物处理系统100包括通过网络170进行通信的一系列废物处理机器110。网络170可以包括公共和/或私有数据通信网络或子网络,包括例如有线和无线网络或子网络。网络170与服务器系统150和数据库160通信。来自废物处理机器110的数据可以通过网络170被发送至服务器系统150,以存储在数据库160中。一个或多个客户端计算装置140可以通过网络170来访问数据库160和服务器系统150,以检索废物处理机器110所存储的信息。存储在数据库160中的信息可以包括例如服务日志、性能统计资料、实时传感器数据、或废物处理机器110发送的其他运行信息。
[0146]
客户端装置140还可以经由网络170向废物处理机器110发送指令,例如用于:开始或停止废物处理机器过程、指定阈值、控制废物处理机器110的操作参数或控制其他功能。为此,该一个或多个客户端装置140可以存储并执行应用软件,该应用软件被配置用于显示其中一个或多个废物处理机器110的操作信息、并促进监管者与一个或多个废物处理机器110的交互。
[0147]
现在参见各个附图来更详细地描述废物处理机器110的实施例。例如,图2是废物处理机器110的功率消耗部件200的框图,展示了废物处理机器110的电力供应配置。总体上,功率消耗部件200全部从废物处理机器110中的电源280汲取功率。例如,电源280汲取外部3相交流电源、比如240v或110v市电。
[0148]
电源280通过贯穿废物处理机器110的标准绝缘电缆来供电,其足以抵抗废物处理机器110的操作温度。在一些实施例中,电源280可以被增补,或者被配置为在发电机、电力存储装置(比如电池)、太阳能面板、或其他适合的电源器件的驱动运行。在一些实施例中,可以从电源280将电力直接供应给系统部件200中的某些部件。在其他实施例中,可以供应给电力集线器或总线330。在一些实施例中,通过与控制器210通信的集线器或总线330来将电力供应给更小的部件,比如滚筒或斜槽传感器。
[0149]
每个废物处理机器包括控制器210、空气流动系统220、具有滚筒重量传感器235的废物处理滚筒230、用于驱动滚筒230内的混合轴的马达240、出口斜槽系统250、废物装载机系统260、和人机接口(hmi)270。控制器210总体上控制废物处理机器110的其他功率消耗部件200的操作或从其接收输出信号。控制器210直接或间接地控制从电源280向功率消耗部件200的电力供应。
[0150]
图3是框图,展示了分布式废物处理系统100的计算部件与传感器部件300之间的数据或信号通信和/或控制。控制器210可以是或者包括废物处理机器110自带的计算装置,该计算装置与废物处理机器110内的各个部件通信以接收信息并传递指令。控制器210包括至少一个计算机处理器212和存储器214(存储可被处理器212执行的程序指令),这两者组合而允许控制器210执行一个或多个控制模块215以施加对废物处理机器110的操作监测并且控制其操作。
[0151]
在一些实施例中,控制器210可以使用适合的可编程逻辑控制器、比如siemens
tm simatic s7-1200来实施。hmi 270为现场操作者提供接口以访问存储在控制器210中的数据、并且经由控制器210来输入控制指令以对废物处理机器的一个或多个操作施加操作控制。在一些实施例中,hmi 270可以使用例如weintek
tm mt8090xe hmi来实施。
[0152]
控制器210也通过网络170与服务器系统150通信。虽然图3展示了废物处理机器110、系统服务器150、客户端装置140、和网络170的特定布置,但是本披露设想了废物处理机器110、系统服务器150、客户端装置140、和网络170的任何适合的布置。作为示例而非限制,一个或多个的客户端装置140、系统服务器150和废物处理机器110可以避开网络170而彼此直接连接。作为另一个示例,控制器110和系统服务器150可以整体地或部分地彼此在物理上或逻辑上处于同一位置。
[0153]
服务器系统150包括至少一个计算机处理器152和存储器154(本地和/或远程处理器152),该存储器存储了可执行程序指令以供处理器152执行。存储在存储器154中的可执行程序指令在执行时用作实施web应用程序342和数据收集代理344的软件模块。web应用程序342提供仪表板来显示并报告分布式废物处理系统100中的一个或多个废物处理机器110的状态信息。web应用程序342还允许管理员通过从管理员传递命令至特定废物处理机器110的控制器210来远程地管控废物处理机器110。这些指令可以包括例如在紧急情况下停止的指令、用于卸载经处理废物的指令、或对所定位的废物箱3405(图34c)进行装载的指令。各个废物处理机器110的大多数操作可以是自动化的,以允许分布式废物处理系统100尽可能自主地起作用。通过系统服务器150进行的控制可以用于对意外的机器状况进行前瞻性监测或对其作出响应。web应用程序342可以使用例如asp.net web应用程序架构来实施。
[0154]
控制器210包括通信接口320或与之相协作,该通信接口允许控制器210将信息传递至网络170以及从该网络接收信息。在一些实施例中,通信接口320可以使用例如3g蜂窝路由器和固定的公共ip sim卡来实施。在其他实施例中,通信接口320可以使用连接至广域网的有线路由器来实施。系统服务器150还包括通信接口335,在一些实施例中,该通信接口335可以使用与广域网连接的有线路由器来实施。通信接口320和335两者均可以使用其他适合的替代性的有线或无线技术来实施。
[0155]
在废物处理机器110内,可以实施通信总线330以允许在废物处理机器110的各个部件与控制器210之间传输数据和命令。在一些实施例中,废物处理机器110的一些部件可以与控制器210无线地通信、并且可以不依赖于通信总线330来接收或发送信号。
[0156]
可以在废物处理机器110中安装电压逆变器,以向系统部件供应特别需要的交流电压。此类部件可以包括马达240、进气风扇420、和排气风扇450。电压逆变器可以配置成迎合不同的能量需求,通过电压逆变器上的接口或远程地通过网络170可获得不同的配置。电压逆变器可以包括变频驱动器或低压转换器。
[0157]
在一些实施例中,在废物处理机器110内安装了三个单独的电压逆变器。在此类实施例中,每个电压逆变器向马达240、进气风扇420、和排气风扇450中的一者提供单独调节的功率,以允许单独控制每个特定马达的功率需求从而满足其各自的额定值,并且方便维护。
[0158]
在一些实施例中,电压逆变器可以包括siemens
tm sinamics v20 basic转换器。
[0159]
在一些实施例中,废物处理机器110还可以包括相机350,该相机安装在滚筒230内或在滚筒230的入口孔(例如,装载舱口)附近以提供正在装载和/或处理的废物的图像。相机350所捕捉的图像可以被控制器210发送至系统服务器150以存储在数据库160中。客户端装置140可以经由系统服务器150来访问存储在数据库160中的图像。
[0160]
系统服务器150还被配置成与数据库160通信。数据库160可以实施在单独的服务器上或与系统服务器150相同的服务器上或通过其被访问。数据库160可以用于存储作为分布式废物处理系统100的一部分的所有废物处理机器110生成的传感器数据。实施数据收集代理344的软件模块可以调解从各个废物处理机器110收集的传感器数据、并且接着将所接收的数据存储至数据库160。在一些实施例中,实施数据收集代理344的过程可以通过modbus udp协议来每隔3秒轮询每个废物处理机器110,例如以查询所有相关传感器和由每个废物处理机器110生成的其他数据。在一些实施例中,实施数据收集代理344的过程可以经由例如ftp协议来每隔15秒轮询每个废物处理机器110。数据收集代理344可以将其在多于一个轮询周期上的查询进行分段,以维持所收集数据的等待时间而不在网络160上产生通信瓶颈。例如,可以以较低的频率周期来进行数据密集的但优先级低的查询,比如每隔15分钟一次查询。另一方面,可以以较高的频率来进行数据少的但优先级高的查询,比如每隔3秒一次查询。
[0161]
可以通过web应用程序342来检索和访问存储在数据库160中的数据。在一些实施例中,系统服务器150可以使用例如windows
tm
操作系统来实施。在一些实施例中,数据库160可以使用例如microsoft
tm sql服务器来实施。可以使用其他适合的操作系统和数据库实现方式来代替。
[0162]
马达:马达240可以包括直流电马达,用于提供足够的扭矩以在装载了最大废物负载(例如,对于1000升滚筒为500-600kg)时使废物处理混合器1400以可配置(选定)的旋转速度旋转。在一些实施例中,混合器1400的旋转速度被选择成使废物处理混合器1400以约5rpm旋转。这个旋转速度被选择为针对马达240汲取的相对最小或较低功率来提供相对高水平或高速率的有效废物分解。在其他实施例中,可以选择另一个速度,比如10rpm。混合器1400的旋转速度可以被选择成将能量效率、处理效率、或这两者最大化。混合器1400的旋转速度可以在处理废物负载的整个过程中选择性地改变。
[0163]
在一些实施例中,马达240可以包括皮带驱动马达、或交流电马达、比如直接驱动马达。
[0164]
空气流动系统:空气流动系统220将经加热且经电离的空气供应到滚筒230中、并且从机器中排放用过的电离氧和分解烟气。空气流动系统220可以包括空气进入侧和排放侧,该空气进入侧具有进入空气过滤器410、电离器415、进气风扇420、阀425、空气加热器430,该排放侧可以包括排气过滤器445和排气风扇450。滚筒230从进入侧接收低湿度的、经加热且经电离的空气、并且将空气从排放侧排放。排放空气与在滚筒230的进入侧处接收到的空气相比典型地具有更高的湿度,因为在食物废物在滚筒230中被处理时其中的水分进入了空气中。
[0165]
空气流动系统部件通过空气导管区段610相连。空气导管区段610可以由铝、塑料、pvc、不锈钢、或其他适合的材料制成。
[0166]
在一些实施例中,压力传感器形成空气流动系统220的一部分、被定位在滚筒230
内,用于向控制器210发送压力数据。期望的压力范围可以在-3毫巴与+3毫巴之间,其中滚筒230内的理想压力相对于处理滚筒的外部环境略微为负、例如至少大约-0.01毫巴。足够的负压可以确保从内部腔室1005到排放系统中的最佳空气流,而不是空气流穿过入口孔1065进入环境中。
[0167]
进气过滤器:进气过滤器410可以包括适合类型的锥形空气过滤器,用于确保环境空气中的污物或污染物在被吸入系统中之前被过滤。进气过滤器410直接联接至电离器的进气口。进气过滤器410是穿过废物处理机器110的外部壳体面板而容易触及的,从而允许维修或更换进气过滤器410。这种构型还确保进气过滤器410最小程度地暴露于污染物和未过滤空气,否则可能影响电离器415的电离过程和操作。在一些实施例中,进气过滤器410可以是平板空气过滤器或圆柱形空气过滤器。在一些实施例中,进气过滤器410可以被包含在过滤器壳体内,该过滤器壳体具有限定的入口部分以允许空气流沿最佳过滤方向被引导穿过过滤器。
[0168]
排气过滤器:排气过滤器445可以包括锥形空气过滤器,该锥形空气过滤器足以从腔室1005内的空气中过滤掉废物颗粒,以将空气中的废物颗粒减到最少或防止其分散到大气中。排气过滤器445可以被包含在过滤器壳体内,该过滤器壳体被布置成提供容易的维修通道以允许容易地更换过滤器。过滤器壳体可以由例如铝、pvc、不锈钢、或其他适合的材料构造成。在一些实施例中,进气过滤器410可以是平板空气过滤器或圆柱形空气过滤器。在一些实施例中,排放空气过滤器壳体具有限定的入口部分以允许空气流沿最佳过滤方向被引导穿过过滤器。
[0169]
电离器:电离器415将空气流中的氧电离和/或自由基化、并且通过空气流动系统220向滚筒230的处理腔室1005提供富含活性氧物质的空气。电离器415可以是低能量等离子装置,该装置利用混合的离子反应途径来生成各种各样的活性氧物质。将电离氧或自由基氧添加至废物负载加速了有机废物的自然分解过程、并且允许通过废物处理机器110将废物体积减小60-90%之间。在一些实施例中,电离器415可以是如日本专利公开号2017-198413中描述的,该专利的内容通过援引并入本文。在一些实施例中,电离器415可以是如日本专利公开号2017-198413中描述的,但是没有该日本专利公布中描述的调节机构。在一些实施例中,电离器415可以包括可从日本的glencal技术有限公司获得的mira
tm
电离器。
[0170]
电离器415产生的电离氧的示例可以包括超氧化物阴离子自由基(o
2-)、过氧化氢(h2o2)、和羟基自由基(oh-)。
[0171]
据认为,在分解过程中添加电离氧或自由基氧通过将食物废物中的抵抗性细胞结构(例如植物细胞)破碎来加快水从废物负载中释放。据认为,这种效果对于废物处理机器110将废物负载进行短时间分解具有显著贡献。
[0172]
另外,据认为,在分解过程中添加电离氧或自由基氧减少了整个分解过程中的挥发性化学物质的输出,并且相应地减轻了经处理的废物残渣颗粒的气味。
[0173]
进气风扇:进气风扇420可以通过风扇入口620吸入空气并且通过风扇出口625将空气吹出。进气风扇420被配置为用于从控制器210接收指令。空气进气风扇420的空气流动速度、功率操作、和其他功能可以是可配置的并且通过控制器210来控制。进气风扇420可以附连在机器框架1020的至少一个支撑构件上,从而提供与其他空气系统部件的间隙并且进一步允许触及来进行保养和维修。
[0174]
排气风扇:排气风扇450可以包括与进气风扇420相似或相同的单元。排气风扇450被布置为用于将空气、用过的电离氧、和空气中的废物残渣抽吸经过一个或多个排放管道而朝向排气过滤器445,并且将经过滤的排放空气吹到附近的外部环境中。排气风扇450可以附连在机器框架1020的内部上,从而提供与其他空气系统部件的间隙并且进一步允许触及来进行保养和维修。
[0175]
空气阀:空气阀425被布置为用于在正常处理操作下将空气流引导至空气加热器430、并且在卸载操作下引导至气刀组件460。空气阀425从控制器210接收控制指令。在一些实施例中,空气阀425将来自空气进气风扇420的全部空气流引导至气刀组件460,以促进在卸载操作期间将废物残渣卸载至接收箱。
[0176]
在一些实施例中,空气阀425将部分空气流引导至气刀组件460,同时还将部分空气流提供至空气加热器430。在这样的实施例中,空气进气风扇420可以被控制器210命令来增大空气流量和压力以适应共享的空气流。
[0177]
空气加热器:空气加热器430被提供用于将从电离器415接收到的经电离空气流加热至配置的温度,以在处理腔室1005内提供期望的温度。空气加热器430可以由控制器210控制、并且被布置为用于接收温度控制和操作指令。空气加热器430可以将空气流加热至稍微超过预定目标腔室温度的温度(例如超过10-20%),以确保当空气流进入腔室1005的较大体积的内部中时腔室可接受温度范围被满足。经电离空气流穿过空气导管区段610到空气加热器430的输入可以物理地位于空气加热器的顶部或底部上,取决于空间和优化需求。在一些实施例中,将空气流提供到空气加热器430的底部处,其中热空气出口设置在顶部处,以在经加热空气流上升时将空气流动效率最大化。进入侧上的空气供应导管可以是隔热的,以将加热器430与滚筒230之间的温度损失最小化。
[0178]
废物处理机器110的处理腔室1005中的空气的目标温度范围被选择成在食物废物受到混合叶片的物理力而被破碎时使食物废物升温,但是不将其加热太多以至于有效地“烹煮”废物。例如,50至70度(可选地大约55至65度)的目标温度范围的优点在于,将废物升温至使食物废物中的水分可以作为蒸气容易地进入处理腔室中的空气中,同时不将其加热太多以至于使废物的潜在营养内容物实质性地变性。对废物负载的处理是通过废物处理混合器1400的搅拌动作、以及经加热的经电离空气供应所提供的加速分解——而不是可以通过将废物烹煮或热分解来将废物负载捣碎的总体高温(例如100+℃)——来实现的。
[0179]
在一些实施例中,处理腔室1005中的目标温度范围在50℃-70℃之间,其中平均温度为大约60℃。在一些实施例中,处理腔室1005中的目标温度范围在55℃-65℃之间,其中平均温度为大约60℃。在一些实施例中,在分解循环的整个过程中,温度范围可以由控制器210动态地控制。温度范围可以取决于待处理废物的具体类型、并且可以被调节以提供理想的分解条件。在一些实施例中,空气加热器430可以由控制器210控制来暂时提供穿过进入侧的处于升高温度的空气,从而补偿在废物处理机器110打开期间在废物负载增加期间的热量损失、并且适应额外的废物负载的额外热量要求。可以将这样的暂时升高控制为进行15至45分钟并且可能涉及将加热器430处的出口温度升高例如10%至50%。在另外的示例中,可以将暂时升高控制为进行大约20至30分钟、并且可能涉及将加热器430处的出口温度升高例如15%至40%。
[0180]
在一些实施例中,特别是在能够处理更大废物体积的实施例中,可以提供附加的
加热和/或隔热器件。此类附加的加热和/或隔热器件可以用于更有效地将热量保留在处理腔室1005内。在此类实施例中,附加的加热器件可以包括加热网片,该加热网片包括围绕腔室护套1010安装的多个电阻性加热元件(例如,丝)。该加热网片可以由电源布置200供电。在此类实施例中,加热网片可以分布在整个纤维隔热挡板或网片上,以改善热量截留并且将所生成的热量均匀分布。
[0181]
其他附加的加热实施例可以包括热水加热系统。例如,该热水加热系统可以安装在附接至腔室护套1010上或安装在其中的空腔中。在此类实施例中,经加热的水或蒸汽可以被引导穿过护套1010内的封闭通道,以向处理腔室1005提供补充的加热效果。这些封闭通道可以将蒸汽或经加热的水引导至选定的(或选择性定位的储器空腔中,由此提供专门定位的热源。替代性地,封闭通道可以被布置成围绕整个腔室护套1010来提供分散的环境热量增加。
[0182]
在一些实施例中,安装了内部挡板系统以将空气流的加热最大化。该挡板可以包括一系列内部导片,这些内部导片被布置为用于将空气流围绕迂回流动路径引导。使用挡板系统可以通过增大空气流行进的内部距离和空气流暴露给加热元件的对应时间,来允许空气流更多地被暴露以从空气加热器430吸收热量。这可以减小将空气过度加热的需要、并且相应地降低能量使用。在一些实施例中,挡板导片可以包括加热元件。在一些实施例中,挡板导片可以进一步使热量对流以直接加热空气流。在此类实施例中,经加热的导片增大了空气流的加热表面积、并且更有效地升高总体空气流温度。
[0183]
流入气室:经加热空气流通过流入气室435从空气加热器430引导到滚筒230中。流入气室435包括沿着滚筒230的内部后下壁的一系列孔,这些孔允许经加热空气被直接提供到腔室1005的废物负载中,例如如图48所示。在一些实施例中,流入气室435到腔室1005中的出口进一步包括成角度的罩。存在该将经加热且经电离的空气沿着滚筒230的下壁向下引导的成角度的遮挡件有助于避免废物颗粒堵塞气室孔。流入气室可以被定位成靠近废物负载或在期望体积的废物内,以允许在电离氧的峰值效率窗口期间在经加热的经电离空气流与废物负载之间获得最大接触量。电离氧的峰值效率窗口可以取决于电离器415而变化、并且可以通过控制器210配置。在一些实施例中,电离氧的峰值效率窗口可以多达6秒。
[0184]
废物处理混合器1400的混合动作允许更多空气流穿入存在于滚筒230的腔室1005中的废物负载中,从而提供对经加热的经电离空气流的更大表面积的暴露。除了电离氧或自由基氧之外,空气流的热量和移动也允许废物负载中的液体有效蒸发。
[0185]
排放气口:排放气口440包括至少一个端口,用于提供废物处理机器110的腔室1005的出口。在一些实施例中,排放气口440可以被定位在腔室外部,比如紧邻装载孔外侧,以最小化或避免经加热的电离空气在其峰值效应窗口内排放。在一些实施例中,排放气口440被定位在入口舱口1710的每一侧,从而将活性电离空气的排放最小化并且提供位置来将用过的空气从入口舱口1710排走。当装载舱口打开时,排气风扇450可以继续运行,以将人在废物烟气中的暴露最小化。
[0186]
在一些实施例中,滚筒顶板可以是基本上平坦的,并且滚筒的总体轮廓可以包括
‘
u
’
形,其中弯曲的下部被顶板盖住。在此类实施例中,该至少一个排放气口440可以包括排放气室、并且可以定位在滚筒230的顶板(即,顶部内表面)中。在此类实施例中,排放气口440可以位于滚筒轮廓的顶部拐角中,从而提供与混合叶片臂820的间隙,以将过量的废物
颗粒吸入排放气口440中的风险最小化。
[0187]
在一些实施例中,排放气口440包括端口与排放气室的组合。
[0188]
空气导管区段:空气流动系统220的部件可以通过空气导管区段610相连。空气导管区段610可以包括由钢、铝、塑料、pvc、波纹管、或其他适合的材料制成的导管和连结区段。在一些实施例中,空气导管区段材料是基于将整个系统的热量损失最小化来选择的。在一些实施例中,空气导管区段610包括柔性管部分,以有助于方便地触及空气流动系统部件以进行维护、保养、或移除。
[0189]
图4描绘了指示空气流动系统220的位置和连接的系统总图。在这个实施例中,通过启用进气风扇420,将环境空气穿过进气过滤器410吸入到电离器415中。在经过滤的空气流发生电离之后,经电离空气被进气风扇420引导穿过阀425进入气刀组件460(在废物残渣的卸载或排出期间)中或进入空气加热器430(在正常的废物处理和分解循环期间)。在经电离空气流被空气加热器430加热以提供期望的腔室温度之后,经加热的经电离空气流被引导穿过流入气室进入腔室1005中。
[0190]
废气从腔室1005穿过排放气口440排放。在图4的所图示实施例中,排放气口440包括被定位成紧密靠近入口舱口1710的排放气室和排放端口两者。排气风扇450将废气穿过排放气口440吸入排气过滤器445中。废物颗粒被捕获在排气过滤器445内,之后经过滤的排放空气流被引导到大气中。
[0191]
在一些实施例中,电离器415可以被定位在阀425之后且在空气加热器430之前,以避免将经电离空气给送穿过气刀组件460。
[0192]
废物装载机系统:废物装载机系统260包括箱架540、装载机保持架510、装载机支撑臂520、以及装载机控制接口530。废物装载机系统260被配置为用于接纳各种各样标准大小的轮式箱、并且将其废物内容物装载到废物处理机器110的滚筒230中。
[0193]
当启用时,箱架540可以沿着装载机保持架510的带槽轨道升高以将容装的箱升高至限定高度、并且接着被装载机支撑臂520倾斜以在入口舱口1710打开时将箱的内容物排空到滚筒230中。
[0194]
箱架540为废物装载机系统260提供支撑框架、并且保护废物装载机系统操作者免于系统的潜在地进行危险性移动的部分的影响。
[0195]
在一些实施例中,废物装载机系统260可以包括经修改的simpro dumpmaster
tm
,其能够接纳多达250kg的标准大小轮式箱并且能够具有多达1.8米的倾翻高度。在此类实施例中,修改可以包括将原装装载机控制接口530改变路径以允许被控制器210控制,由此允许废物装载机系统260的倾翻动作与入口舱口致动系统和其他系统集成。
[0196]
在一些实施例中,对simpro dumpmaster
tm
的改装包括从装载机支撑臂520的成角度部分上去除防护伸出部,从而允许在机器框架1020与废物装载机系统260之间获得更紧密配合。在一些实施例中,在废物装载机系统260中设置废物箱身份传感器310,以用于检测装载到废物装载机系统260中的箱3405的存在和身份。废物箱身份传感器310可以检测箱的存在(包括其对准或定位),以确保废物的成功装载。
[0197]
废物处理机器110上可以存在读取器以用于检测箱上的射频识别(rfid)标签、近场通信(nfc)标签、或其他机器可读物品,以读取箱3405上的独特箱标识符。数据库160可以保留将独特箱标识符与分布式废物处理系统100的订户或使用者关联的记录。在一些实施
例中,当废物装载机系统260从箱3405装载废物时,独特箱标识符可以被读取并且被发送至控制器210。在将箱3405的内容物装载之后,控制器210可以使用重量传感器235的信息来确定滚筒的内容物的总重量变化。滚筒的内容物的总重量变化可以与读取的独特箱标识符相关联、作为所沉积的内容物的重量。读取的独特箱标识符值和内容物的重量值可以连同特定废物处理机器110的时间戳和独特标识符一起被控制器210发送至数据库160。所记录的独特箱标识符值和内容物的重量值可以用于基于通过分配给使用者的特定废物箱所处理的废物的重量来为分布式废物处理系统使用者开发票或开账单。在一些实施例中,废物装载机系统260可能在废物被装载到滚筒中之前需要使用者认证。该认证可以通过hmi 270或安装在废物装载机系统260上的近场通信装置(未示出)来进行。
[0198]
在装载废物之前的使用者认证可以起到识别分布式废物处理系统100的使用者的作用、并且最终可以用于开账单或开发票的目的。在一些实施例中,关于识别分布式废物处理系统的使用者的身份或该独特箱标识符的信息还可以用于识别在特定时刻装载的废物的来源。在废物处理机器110发生故障的情况下,这个信息可以允许发现可能是废物处理机器110的故障原因的废物源。例如,将金属物体装载到滚筒中可能妨碍废物处理机器的操作。利用使用者的身份信息或独特箱标识符,可以识别负责装载金属物体的使用者或订户。
[0199]
入口舱口:入口舱口1710包括一组壳体面板920,这组壳体面板垂直布置,在机器壳体910的顶部形成90
°
角。入口舱口1710可以是铰接式的,以允许入口致动器臂1720响应于来自控制器210的控制信号而致动,从而提供经腔室废物入口孔1065到腔室1005的通路。入口舱口1710可以由控制器210控制来在装载过程期间自动地打开和关闭,或者根据需要手动地打开和关闭以在保养操作期间检查滚筒230。
[0200]
在一些实施例中,入口舱口包括遮挡层,该遮挡层安装在壳体的内部上。该遮挡层可以降低经处理的废物残渣和新废物负载落到废物入口孔1065之外的风险。
[0201]
在一些实施例中,可以在入口舱口1710上在舱口的任一侧安装附加遮挡件,使得在打开位置时,遮挡件将人为干扰和从废物处理机器110的顶部或侧面受伤的风险最小化。在其他实施例中,这个遮挡件形成箱装载机3430的一部分。
[0202]
在一些实施例中,入口舱口1710的外围可以包括橡胶环境密封件,以降低废物进入外部环境中的风险,从而将污染和气味最小化。
[0203]
机器壳体:废物处理机器110被容纳在机器壳体910内,该机器壳体可以包括附连至机器框架1020上的一系列壳体面板920。
[0204]
壳体面板920可以是由铝、不锈钢、丙烯酸类化合物或其他适合的材料制成的金属片面板。壳体面板920可以涂覆有粉末,以获得耐热性和抵抗环境风化的保护。在一些实施例中,壳体面板920通过涂料、包裹涂层、或其他适合的手段被保护。
[0205]
壳体面板920可以分段地附连至机器框架1020和从其上移除,以允许触及废物处理机器110的所有内部部件来进行维修或保养。在一些实施例中,壳体面板920可以安装在铰链上,这些铰链适合于打开和关闭定期被触及的机器壳体910的区域,比如电力系统和控制系统。
[0206]
壳体面板920可以装配有手柄或壳体面板手抓件940,以允许更容易地移除壳体面板920。
[0207]
壳体面板920可以限定用于空气流动系统220部件(比如空气导管610)的一个通气
孔或一系列通气孔930,以将废气排到大气中。
[0208]
机器框架1020包括多个框架区段,这些框架区段被布置为用于为壳体面板920提供总体结构。机器框架1020可以由铝、不锈钢、或足以抵抗环境或操作损坏而提供结构完整性的其他适合材料制成。
[0209]
在一些实施例中,机器框架1020包括多个框架区段,这些框架区段被布置为废物处理机器部件的、比如空气流动系统220部件的结构支撑件。
[0210]
机器框架1020可以安装在安装底板1030上,该安装底板包括平坦表面,该平坦表面被提供成形成废物处理机器110的基部。安装底板1030可以提供稳定的表面以将废物处理机器部件(包括滚筒230、空气流动系统部件、和机器壳体910)安装在其上。安装底板1030还可以用于防止由于经处理的废物残渣或未经处理的废物落到腔室滚筒230或出口斜槽830之外而造成的环境污染。
[0211]
在一些实施例中,安装底板1030在滚筒腔室护套1010下方限定了安装底板孔1035,该安装底板孔可以辅助通气并且提供让环境空气被吸入空气流动系统220中的通路。
[0212]
多个框架支撑支脚550附连至安装底板1030和机器框架1020的底侧上。框架支撑支脚550将机器壳体910升高到地面上方一定距离,以允许获得改善的穿过安装底板孔1035的环境空气流动、减小由于与硬的地面表面接触而对机器壳体造成的潜在损坏、并且减小由于移动、安装、或移除废物处理机器110对地面表面造成的潜在损坏。
[0213]
滚筒:滚筒230包括限定了内部腔室1005的腔室护套1010、第一腔室壁1040、和第一腔室壁1050。滚筒230可以由铝、钢、不锈钢、或其他适合的材料制成。由滚筒230限定的腔室大小可以为适合于在最大容量下容纳1000l的大小。例如,在一些实施例中,腔室大小可以为容纳不同的最大废物体积比如1600l、2000l、2400l、3000l、4000l、5000l、或10,000l的大小。在一些实施例中,滚筒230可以被配置为具有其他体积容量。例如,在一些实施例中,腔室大小可以为容纳在约500l至约20,000l之间的最大废物体积的大小。
[0214]
滚筒230用作混合滚筒,在该混合滚筒中,废物负载与腔室1005内的已有的经处理的废物残渣合并并且经历以下过程:混合、搅动、曝气、以及暴露给经加热的经电离空气流以将食物废物快速分解。
[0215]
腔室护套1010包括具有腔室废物入口孔1065的圆柱形管区段,该孔允许废物负载沉积在腔室1005内以进行处理。在一些实施例中,腔室护套1010包括
‘
u
’
形轮廓,该轮廓具有弯曲底部、并且提供平坦的顶部而允许滚筒重量传感器235、排放气口440、和其他内部腔室部件获得更好的间隙。在一些实施例中,设置了滚筒检修孔1090以在滚筒的下部内形成可移除板,该可移除板将被移除来获得触及腔室1005来进行维修或保养的通路。
[0216]
第一和第二腔室壁1040、1050用作滚筒230的端壁、并且为腔室护套1010提供外部支撑,将该腔室护套附连至安装底板上、并且升高以允许将更大的箱装配在出口斜槽830下方。
[0217]
第一腔室壁1040被定位在马达240旁边、并且具有适合的孔以允许混合轴810延伸穿过壁1040并且在腔室1005内旋转。第二腔室壁1050具有混合轴端部安装固定件1080,用于安装混合轴的端部,同时允许其在马达240的驱动力下自由地旋转。第一腔室壁1050还可以限定用于出口舱口1100的腔室出口孔1060和用于出口致动器臂固定板1205和出口斜槽830的外部固定件。腔室出口孔1060在第一腔室壁1050上的高度可以足以确保用于标准轮
式箱、比如箱3405的间隙,该箱被定位成在出口斜槽830下方打开。
[0218]
腔室壁1040、1050和腔室护套1010可以通过焊接或其他适合的工艺永久地连结在一起,使得它们形成基本上防漏的密封,从而防止废物颗粒落到腔室1005之外。在一些实施例中,腔室壁1040、1050和腔室护套1010可以是可分开的,以用于维修、清洁或保养的目的。
[0219]
在一些实施例中,滚筒支撑支脚1070可以安装在腔室壁1040、1050的下部上,从而在滚筒230与安装底板1030之间提供额外的安装或支撑。
[0220]
滚筒230具有:至少一个滚筒重量传感器235,该滚筒重量传感器可以包括至少一个测压元件,以允许获得滚筒内容物的准确重量测量值;和至少一个温度传感器,以允许从空气流入气室和排放气室处的空气流获取温度读数。这些传感器可以直接安装在腔室1005内或者可以设置在突出到腔室1005中的安装件上。
[0221]
设置了测压元件以能够准确测量滚筒内容物的重量。测压元件将重量读数提供给控制器210。在一些实施例中,使用三个测压元件来提供更准确的测量值。测压元件可以安装在腔室壁1040、1050上或下方、在腔室护套1010内、或者在至少一个滚筒支撑支脚1070上。
[0222]
测压元件可以向控制器210提供连续的重量数据,以计算在处理之前、期间、和之后的负载重量(针对新添加的食物废物负载)、卸载重量、操作重量、和总重量变化(例如,减少)。控制器210所接收的测压元件数据可以用于记录废物处理机器110的总体性能。
[0223]
在一些实施例中,设置了三个测压元件来获取滚筒总重量,可以将其求平均以便准确。在此类实施例中,可以将测压元件放在机器框架1020的面向前的区段和面向后的区段上的点下方且在滚筒支撑支脚1070下方。
[0224]
可以使用测压元件来指明最小滚筒重量,以允许在卸载操作期间在腔室1005内保留阈值(或最小)量的经处理的废物残渣。在实验操作期间已经显示在腔室1005内留下一定量的经处理的废物残渣将允许更有效地分解新的废物负载并且似乎有助于维持经处理废物的营养和化学含量的一致性。
[0225]
在一些实施例中,要在滚筒230中保留的废物残渣阈值量可以是滚筒的最大总重量容量的25-30%。在一些实施例中,阈值量可以是固定的重量值,比如针对1000l滚筒为大约100kg至大约150kg。在一些实施例中,阈值量可以是新废物负载的峰值重量的25-30%、或固定重量值中的较大者。
[0226]
当测压元件检测到滚筒230的重量等于或小于最小阈值时,则废物处理机器110可以停止通过出口斜槽系统250进行的卸载操作。可以在整个处理操作期间的各个点进行重量测量,以跟踪滚筒重量并且将其与阈值重量值进行比较。
[0227]
在一些实施例中,可以在腔室1005内安装远程可访问相机,以提供滚筒或废物状况的图像。
[0228]
在一些实施例中,腔室护套1010可以包括沿着后端的一系列孔,这些孔与腔室废物入口孔1065沿对角线相对,从而形成流入气室435来使经加热的经电离空气进入腔室1005中。在一些实施例中,这些孔可以形成在前端处、在腔室废物入口孔1065的下方附近。
[0229]
在一些实施例中,在腔室护套1010的上部区域中以圆柱形或“u”形构型安装了排放气口440。
[0230]
废物处理混合器:废物处理混合器1400包括可旋转的轴810和至少一个混合叶片
固定板1410,该轴附连至马达驱动连接件870(其进而连接至马达240),每个混合叶片固定板支撑至少一个混合叶片臂820。这些混合叶片臂在臂的径向端处具有至少一个混合叶片端部860。废物处理混合器1400被配置为用于搅动并且破碎分开沉积在腔室1005内的废物负载、并且允许废物负载最多地暴露给来自空气流动系统220的经加热的经电离空气流。
[0231]
混合轴810包括圆柱形管状构件,该构件连接至马达240以提供作为轴杆的旋转移动,从而允许混合叶片臂搅动穿过沉积在腔室1005内的废物负载。混合轴810可以是由不锈钢、铝、或其他适合的材料构造成的实心或中空构件。在一些实施例中,设置了额外的轴覆盖区段890以保护混合轴810免于损坏,并且为混合叶片固定板1410提供固定件。
[0232]
混合轴810在腔室1005内被固持在位,其中一端被马达240固定并且相反端穿过混合轴端部固定件1080,该混合轴端部固定件维持混合轴810的水平位置、同时准许自由旋转移动。
[0233]
在一些实施例中,混合轴810可以是中空的金属圆柱形构件,其沿着长度具有多个孔。在此类实施例中,空气流动系统220可以被布置成提供穿过混合轴810的经加热的经电离空气流。
[0234]
在沿着混合轴810长度的多个不同点处安装了混合叶片固定板1410。混合叶片固定板1410为混合叶片臂820提供了稳定且可移除的固定件。这允许通过移除和重新安装混合叶片固定板1410来同时进行多个混合叶片臂820的简化的安装和保养。在一些实施例中,混合叶片固定板1410允许附连多达六个混合叶片臂820。混合叶片固定板1410可以由不锈钢、铝、或其他适合的材料构造成。
[0235]
在1000l滚筒的一些实施例中,沿着混合轴810的长度设置了三个混合叶片固定板1410,其各自具有附连至其表面上的六个混合叶片臂820。
[0236]
混合叶片臂820包括一段平坦金属,其朝向混合轴810的旋转方向弯曲。混合叶片臂820有适合的长度到达腔室1005的壁附近,同时在经电离空气到流入气室435的联接处上方仍提供与腔室1005和保护套的表面相隔的最小间隙距离。混合叶片臂820可以由不锈钢、铝、或其他适合的材料构造成。混合叶片臂820可以通过铆钉、螺钉、螺栓、通过焊接、或其他适合的固定手段来附连至混合叶片固定板1410上。
[0237]
混合叶片臂820的方向和曲率程度可以允许这些臂更有效地抵抗废物负载的阻力,从而与基本上笔直的叶片臂相比将这些叶片臂的磨损和损坏的风险最小化。
[0238]
这些混合叶片端部860被设置为在处理操作期间搅动并破碎废物负载。可以在废物处理机器110内设置各种各样构型的混合叶片端部860。
[0239]
在一些实施例中,混合叶片端部860被配置为犁端865,该犁端包括两个成角度构件,这两个成角度构件在附接至混合叶片臂820的中心中间点处相遇(沿尾随旋转方向分叉)并且适合于将废物物质围绕腔室1005内推动和引导。在一些实施例中,犁端865是不对称地布置的以将废物物质朝向腔室1005内的期望区域引导。
[0240]
在一些实施例中,混合叶片端部860被配置为或包括桨叶端866。此类桨叶端866可以包括平坦面板部分,该平坦面板部分相对于混合叶片臂820以垂直的取向附连,被布置为用于对腔室1005内的废物负载提供搅动或推动运动。
[0241]
混合叶片端部860可以由不锈钢、铝、或其他适合的材料构造成。混合叶片端部860采用不同形状和构型的叶片以在旋转期间在腔室1005内产生不同的搅动效果。
[0242]
在一些实施例中,混合叶片端部860可以全部以类似的方式配置在每个混合叶片固定板1410上。在其他实施例中,混合叶片端部860在每个混合叶片固定板1410上的构型是交替的。
[0243]
在一些实施例中,混合叶片端部860可以被布置或配置成将废物负载朝向腔室1005的不同部分推动。图48指出了一个这样的实施例,其中通过使轴与混合叶片的旋转方向朝向腔室后部(与装载舱口相反)来推动腔室1005内的被操纵的废物负载4810,同时允许有小的空间让经电离空气穿过空气引导件或罩4820离开流入气室435(沿滚筒壁向下的方向,如图48的箭头4822指示的)并且接着与废物相互作用。这种布置允许食物废物显著地暴露于经加热的经电离空气流。
[0244]
在其他实施例中,混合叶片端部860被布置或配置成将废物负载朝向出口舱口1100推动,从而允许残渣铲子880更容易收集废物。
[0245]
在一些实施例中,混合叶片臂820被布置成具有空隙或彼此间隔开,以提供废物装载机系统260对腔室的畅通的触及、并且允许废物负载被沉积在滚筒230内而受到最小阻碍。这可以通过限制一个或多个混合叶片固定板1410上的、最靠近或者在空间上(在旋转意义上)与废物入口孔1065对准的混合叶片臂820的数量来实现。例如,在一些实施例中,这是通过附连三个混合叶片臂820来实现,其中每个混合叶片臂具有桨叶端866、被定位成围绕混合叶片固定板1410间隔开120
°
。这种布置可以提供最佳地间隔开的叶片构型,同时仍维持废物处理的功效。
[0246]
控制器210可以跟踪混合轴810的位置(例如,经由与轴810相关联的位置传感器),使得当装载操作经由废物入口孔1065开始时,最靠近废物入口孔1065的混合叶片臂820旋转,而使得叶片端部860不阻碍废物被装载到处理腔室1005中。例如,叶片端部860可以被定位在离装载点相对最远的点处,使得叶片端部860之间的中点与装载孔大致在中心对准,由此确保对新沉积的废物负载的阻碍最小。
[0247]
残渣铲子880设置在被附连至最靠近出口舱口1100的混合叶片固定板1410上的混合叶片臂820上、被配置为用于将经处理的废物残渣从腔室底部向上翻带到高于出口舱口1100的点,从而允许残渣铲子成角度以使废物残渣通过重力沉积在出口舱口1100上。残渣铲子880可以由不锈钢、铝、或其他适合的材料构造成。
[0248]
出口斜槽:出口斜槽830被设置为用于将经处理的废物残渣从腔室1005引导至在废物处理机器110外部的接收箱。出口斜槽830包括气刀组件460、出口致动器臂1115、防护凸缘1225、流出空气进气口1215、出口致动器臂枢转件1210、出口致动器臂固定板1205、出口舱口1100、和出口斜槽830。
[0249]
出口舱口1100通过出口致动器臂1115部署到腔室1005中,以通过残渣铲子880来接收经处理的废物残渣。所沉积的经处理的废物残渣接着被气刀组件460吹送经过出口斜槽830。出口斜槽830的形状为提供成角度部分和向下斜槽部分以用于将经处理的废物残渣引导到接收箱中。出口舱口1100可以通过至少一个框架板1220安装至第二腔室壁1050上。
[0250]
出口舱口830可以被配置成在卸载操作中通过与hmi 270的相互作用、或者通过经由客户端装置140的远程访问来部署。在一些实施例中,指定了固定的卸载时间,从而防止卸载操作或防止通过废物装载机系统260将新的食物废物添加到腔室1005中。这个固定的卸载时间可以允许完成不间断的处理周期,从而确保经处理的废物残渣准备好在既定时间
进行卸载和收集。
[0251]
在一些实施例中,可以向客户端装置140发送通知,该通知指示固定的卸载时间已经到了或者卸载周期已经完成,并且经处理的废物残渣箱现在准备好进行收集。
[0252]
出口致动器臂1115可以通过致动器臂固定板1205附连至滚筒230上,从而形成稳定的基部以便抵抗第二腔室壁1050致动。出口致动器臂1115可以是由控制器210控制的液压臂。出口臂枢转件1210将致动力从出口致动器臂1115传递到出口舱口1100。防护凸缘1225可以由出口臂枢转件1210撬动以将致动力进一步分布在出口舱口1100的长度上、并且形成屏障,从而收集由残渣铲子880沉积的经处理的废物残渣。
[0253]
气刀组件460包括由出口舱口1100限定的通气空腔、通气唇板1310、和背衬板1320。背衬板1320可以对气刀组件460的提供额外的支撑。气刀组件460通过流出空气进气口1215接收来自空气流动系统220的空气流。流出空气进气口1215将空气引导到出口舱口1100与通气唇板1310之间的通气空腔中,通气唇板1310具有跨出口舱口1100的顶部并且围绕其延伸一定距离的唇部分。在出口舱口1100的端部与通气唇板1310的唇部分之间限定了空间以允许空气流被唇部分沿着出口舱口1100的外表面向下导向和引导,从而形成气刀。气刀应具有足够的压力来使所沉积的经处理的废物残渣沿着出口舱口1100移动并且向下穿过斜槽到接收箱中。
[0254]
出口斜槽830可以由铝、钢、不锈钢、或其他适合的材料制成。出口斜槽830可以容纳至少一个箱深度传感器840。箱深度传感器840检测被定位在出口斜槽830下方的接收箱中经处理的废物残渣的高度。
[0255]
图49描绘了当出口舱口1100被部署成接收经处理的废物残渣时残渣铲子880在出口舱口1100上方的相对定位。在图示的实施例中,混合叶片臂820延伸超过腔室出口孔1060的高度,以提供混合叶片端部860和残渣铲子880的间隙,从而在打开或关闭构型时不与出口斜槽1100碰撞。
[0256]
图49进一步描绘了残渣铲子880向外并且朝向出口斜槽1100成角度,以在旋转到部署好的出口斜槽1100上时提供定向沉积效果,从而允许废物残渣更准确地沉积在斜槽1100上、并且将废物处理混合器1400每圈旋转所沉积的废物残渣的量最大化。在一些实施例中,箱深度传感器840提供关于接收箱中的经处理的废物残渣的高度的连续感测数据。
[0257]
在一些实施例中,箱深度传感器840检测接收箱中的经处理的废物残渣的高度已经到达预设深度阈值,指示箱的满负载。
[0258]
箱接近度传感器:可以设置箱接近度传感器950来检测在出口斜槽830下方紧密靠近壳体面板920处接收箱的存在。箱接近度传感器950与控制器210通信。如果箱接近度传感器950检测到接收箱3405的存在,则出口斜槽系统250可以被启用以将经处理的废物残渣引导到接收箱3405中。如果在箱接近度传感器950没有感测到接收箱3405存在的情况下启用出口斜槽系统250,则出口斜槽系统250可能不接合。
[0259]
在一些实施例中,箱接近度传感器950指示在预限定距离内是否存在物体。在一些实施例中,箱接近度传感器指示预限定距离内识别的物体的类型;例如,物体是否是接收箱。例如,在一些实施例中,箱接近度传感器950检测特定类型的接收箱,比如120l、140l、或240l接收箱。
[0260]
在一些实施例中,箱接近度传感器950感测预定距离内的物体上的标识标签,将其
与服务器系统150的信息进行关联以识别接收经处理的废物残渣的使用者或实体,特别在多个使用者或实体共享废物处理机器110的使用时。
[0261]
替代性实施例:图34描绘了废物处理机器110的替代性实施例3400。除了本文指出的区别之外,废物处理机器实施例3400以与废物处理机器110基本上相同的方式操作、并且具有与其基本上相同的结构和功能。在实施例3400中,腔室护套1010具有的总体长度和直径提供例如大约1000kg的最大总体废物处理重量。在实施例3400中,混合轴10具有的长度为与混合叶片臂820附连的四个混合叶片固定板1205提供间隙。图34的实施例还包括面向前的出口斜槽3410、和侧装式箱装载机3430。
[0262]
面向前的出口斜槽3410通过出口传送机3420将处理废物引导到接收箱中。出口传送机3420通过功能上类似的出口舱口1100从腔室1005接收废物,并且将其传送穿过机器壳体910中的传送孔3440。
[0263]
侧装式箱装载机3430被配置为用于部署箱装载臂3450以将箱升高并倾倒到装载斜槽3460中,从而将废物沿着装载斜槽3460沉积到腔室1005中。
[0264]
例如,实施例3400的马达240可以包括皮带驱动马达。
[0265]
经处理废物:由废物处理机器110产生的经处理的废物残渣可以包括固体且干燥的已分解有机物质颗粒。在处理操作期间,在腔室1005内从废物负载中蒸发水。通过蒸发水、用经加热的经电离空气流进行的加速分解、以及废物处理混合器1400的毁坏动作,到处理完成之时,输入废物的总重量和/或体积可以减小至输入废物负载的大约20%。例如,在约1000l体积容量的滚筒中,可以向滚筒中已经存在的大约150kg残渣(上一次废物处理中剩下的)添加大约450kg的输入废物负载,并且该输入废物负载可以被减小其质量的大约80%,达到约90kg。如果要去除所有剩余残渣,这仅需要在下一个卸载步骤中从处理滚筒230中去除大约90kg的残渣。然而,如本文其他地方指出的,可能期望在处理滚筒中保留某个最小量的经处理的废物残渣,以提高后续有机废物负载的处理效率。
[0266]
经处理的废物残渣可以具有相对中性或略微碱性的ph、并且不会促进任何腐蚀性损害、皮肤问题或环境问题。例如,经处理的废物残渣可以具有在约6至11之间、在约7至10之间、或者在约7至9之间的ph。在一些实施例中,经处理的废物残渣可以具有至少略微碱性的ph。例如,经处理的废物残渣可以具有至少约7、至少约7.5、或至少约8的ph。
[0267]
令人惊讶地发现,根据如本文描述的至少一些实施例,该过程可以产生至少略微碱性的经处理的废物残渣,使得引入略微碱性的经处理的废物残渣和典型地酸性的新鲜食物废物可以在处理期间至少促进原初反应(initial reaction),以提供进一步增强的处理能力。在一些实施例中,本文描述的过程包括引入经处理的废物残渣和新鲜食物废物以进行处理,或者这些过程包括在两批或更多批处理之间在处理腔室中保留残余量的经处理的废物残渣。例如,被提供(即,引入或保留)到腔室中以便与未处理食物废物一起处理的经处理的废物残渣的量(按总的经处理的废物残渣和未处理食物废物的重量%计)可以为至少约5、10、15、20、25、30、35、40、45、或50。被提供到腔室中以与未处理食物废物一起处理的经处理的废物残渣的量(按总的经处理的废物残渣和未处理食物废物的重量%计)可以小于约60、55、50、45、40、35、30、25、20、15、或10。被提供到腔室中用于与未处理食物废物一起处理的经处理的废物残渣的量(按总的经处理的废物残渣和未处理食物废物的重量%计)可以在上述下限量和/或上限量中的任意两个的范围内,例如在约5至60之间、10至55之间、15
至50之间、20至45之间、或25与35之间。
[0268]
经处理的废物残渣可以保留高营养负载,包含一定的氮、磷、钾以及其他金属和矿物质,从而允许经处理废物被用作用于土壤改良的肥料。
[0269]
在下表中提供了经处理的废物残渣与其他已知的肥料的比较。
[0270]
在一些实施例中,经处理的废物残渣的营养含量足以用作动物饲料。在这些实施例中,经处理的废物残渣可以直接喂养动物或牲畜、或者可以与其他原料混合以根据牲畜需求来提供较低的总营养浓度。
[0271]
在一些实施例中,经处理的废物残渣可以用作在厌氧消化中使用的原料。在这些目的中,经处理的废物残渣的营养含量和热值含量的一致性可以允许获得更加一致的能量输出。另外,经处理的废物残渣的稳定性和存放寿命可以利于残渣作为燃料源被运输和使用。
[0272]
经处理的废物残渣可以被提供为固体颗粒。固体颗粒可以包括在约1微米至约5mm的大小范围内的单个颗粒。这些单个颗粒可以小于例如约(以微米计)5000、2000、1000、500、250或100。包含固体颗粒的经处理的废物残渣可以具有通过固体含量、水(水分)含量、和剩余孔隙体积提供的某种组成。
[0273]
经处理的废物残渣的固体含量(基于总重量%)可以在约10至80、20至70、或30至60的范围内。经处理的废物残渣的固体含量(基于总重量%)可以为至少约10、20、30、40、50、60、或70。经处理的废物残渣的固体含量(基于总重量%)可以小于约80、70、60、50、40、30、或20。经处理的废物残渣的固体含量可以在上述下限量和/或上限量中的任何两个的范围内。
[0274]
经处理的废物残渣的水分含量(按总废物残渣的重量%)可以小于约30、25、20、15、10、9、8、7、6、5、4、3、2、1、0.5、或0.1。水分含量(按总废物残渣的重量%)可以为至少约0.1、0.5、1、2、3、4、5、6、7、8、9、10、15、或20。水分含量(按总废物残渣的重量%)可以在上述
下限量和/或上限量中的任何两个的范围内,例如在约1与30之间、在2与25之间、或在5与20之间。
[0275]
对于给定体积的固体颗粒,孔隙体积(占残渣总体积的%)可以为至少5、10、15、20、25、30、35、40、45、50、55、60、65、或70。对于给定体积的固体颗粒,孔隙体积(占残渣总体积的%)可以小于约75、70、65、60、55、50、45、40、35、30、25、20、15、或10。对于给定体积的固体颗粒,孔隙体积(占残渣总体积的%)可以在上述下限量和/或上限量中的任何两个的范围内。
[0276]
经处理的废物残渣可以是基本上电离的残渣。经处理的废物残渣可以是基本上无菌或惰性的,例如具有低微生物含量。
[0277]
经处理的废物残渣可以具有低气味水平。例如,经处理的废物残渣可以具有低硫化物含量。硫化物可以包括硫化氢、羰基硫、甲基硫醇、乙基硫醇、二甲基硫、正丙基硫醇、噻吩、正丁基硫醇(n-butyl bercaptan)、和四氢噻吩。任何单独量或总组合量的硫化物中的硫化物含量(以ppm计)可以小于约100、90、80、70、60、50、40、30、20、10、5、1、0.5或0.1。
[0278]
经处理的废物残渣的有机固体含量(按总残渣的重量%计)的量可以为至少约30、40、50、60、70、80、90、或95。在另一个实施例中,经处理的废物残渣的固体含量中的有机固体的比例的量(按总固体含量的重量%计)可以为至少约50、60、70、80、90、95、98、或99。应了解的是,有机固体含量源自输入源,包括食物残留物,例如来自各种动物和植物来源。应了解的是,有机含量包括例如各种碳水化合物、脂肪、木质素、和蛋白质。经处理的废物残渣还可以具有低的挥发性有机物含量,例如丁酮以外的挥发性有机化合物,其含量(μg/m3)可以小于约10、9、8、7、6、5、4、3、2、1、0.5或0.1。
[0279]
图18是根据一些实施例的电气原理图1800,展示了废物处理系统110内的功率分布。示意图1800展示了电源280的部件,这些部件接收400v 3相交流电形式的电力输入并且使用隔离器、分布器、转换器、和其他必要的电部件来在废物处理机器110内分布功率。
[0280]
图19是根据一些实施例的电气原理图1900,展示了废物处理系统110内的安全电路。该安全电路为废物处理系统110内的各个电部件提供电断开机构。电断开机构可以响应于位于废物处理机器110的外部上的开放的舱口或门或应急按钮、或者响应于来自系统服务器150的紧急启用命令而启用。
[0281]
图20是根据一些实施例的电气原理图2000,展示了废物处理系统110内的滚筒驱动电路。滚筒驱动电路为用于驱动废物处理系统110内的混合组件的各个马达提供电驱动与控制机构。
[0282]
图21是根据一些实施例的电气原理图2100,展示了废物处理系统110内的入口驱动电路。入口驱动电路为用于驱动废物处理系统110内的入口致动器臂的各个马达提供电驱动与控制机构。
[0283]
图22是根据一些实施例的电气原理图2200,展示了废物处理系统110内的出口驱动电路。出口驱动电路为用于驱动废物处理系统110内的出口致动器臂的各个马达提供电驱动与控制机构。
[0284]
图23是电气原理图2300,展示了向滚筒230内的电离器和三个测压元件供电的电路。图24是电气原理图2400,展示了在废物处理机器110上的6个机器按钮后方的电路。这些按钮包括:重置按钮、紧急停止按钮、装载紧急停止按钮、开始按钮、停止按钮、和装载按钮。
[0285]
图25是电气原理图2500,展示了连接废物处理系统110内的各个传感器的电路。在其他实施例中,各个传感器包括:废物装载箱接近度传感器、滚筒压力传感器、桨叶位置传感器、废物出口箱接近度传感器、废物出口箱容量传感器、废物负载臂位置传感器、和其他相关传感器。
[0286]
在一些实施例中,系统的传感器包括入口空气温度传感器、流入气室温度传感器、排放空气温度传感器、和滚筒压力传感器。在一些实施例中,可以通过下表来指示在机器110操作期间期望的示例性传感器值。传感器期望范围滚筒温度周围环境-60℃空气流动速率0-6米每分钟空气出口温度周围环境-60℃空气入口温度周围环境-60℃滚筒压力-3至+3mba,目标:-0.01mba空气气室温度140℃至185℃
[0287]
图26是电气原理图2600,展示了将控制器210连接至废物处理机器110的各个部件上的电路。图27是电气原理图2700,展示了将hmi270连接至废物处理机器110的各个部件上的电路。
[0288]
图28是电气原理图2800,展示了将出口致动器连接至电源和控制器210以接收输入命令的电路。图29是电气原理图2900,展示了将空气流动系统220的各个加热器连接至电源和控制器210的电路。
[0289]
图30是电气原理图3000,展示了将维修舱口安全开关连接至图19的安全电路1900的其余部分上的电路。图31是电气原理图3100,展示了连接废物装载机系统260的液压马达和螺线管的电路。图32是电气原理图3200,展示了连接废物装载机系统260的入口舱口致动器控制器的电路。图33是电气原理图3300,展示了连接废物装载机系统260的入口舱致动器的电路。
[0290]
图35是根据一些实施例的废物处理机器110的总体操作的流程图3500。步骤3510涉及将废物装载箱定位在废物装载机系统260中。操作人员可以打开废物装载机系统260的门,从而将废物装载箱定位在箱架上在装载机保持架510内。在定位废物装载箱之后,操作人员可以关闭门x、并且操作废物装载机系统260的控件以开始将废物沉积到滚筒230中。这种开始还锁定了废物装载机系统260的门。在包含废物箱身份传感器310的实施例中,废物装载机系统可以读取箱上的任何身份,以确定与箱相关联的顾客的身份。在开始沉积之后,废物装载机系统260向控制器210发送以下消息:传送要装载额外废物的指令和顾客的身份。该消息还包括待添加至滚筒的额外废物的重量。
[0291]
在步骤3520中,控制器210评估是否可以将添加的额外废物装载到滚筒230中。这种评估是基于滚筒230的最大重量装载阈值进行的。在一些实施例中,这个最大重量装载阈值可以为1000kg。还可以考虑其他因素,比如经处理废物从滚筒中处置或分配的容易性。如果存在于滚筒中的废物接近可以被分配的状态,则控制器可以延迟添加额外废物直至存在于滚筒中的废物被分配。如果出于上述的任何原因,使滚筒230不能接收更多废物,则控制转到步骤3590,其中控制器210评估滚筒230中的废物的重量是否大于最小容量。如果滚筒
230中的废物的重量大于最小容量,则控制转到步骤3560,其中废物处理机器110恢复或继续其操作。另一方面,如果滚筒230能够接收更多废物,则控制转到步骤3530。
[0292]
在步骤3530中,暂停滚筒230和废物处理混合器1400的操作,在步骤3540中,打开入口舱口1710并且废物装载机系统260接收来自控制器210的指令以升高废物装载箱并向外倾倒使其内容物落入滚筒230中。在步骤3550中,通过测压元件来确定更新后的滚筒230的内容物重量并且由控制器存储。还可以将更新后的重量和与废物的实际装载相关联的时间发送至控制与监测服务器150。系统服务器150可以将此类信息存储在数据库160中。在重量数据记录步骤3550之后,在步骤3560中,废物处理机器110继续、或开始废物的处理。继续处理废物,直至在步骤3570中触发废物卸载事件。流程图36展示了生成废物卸载触发所涉及的指标和步骤的细节。
[0293]
在根据图36的流程图生成废物卸载触发之后,接着在步骤3580中,开始经处理废物的卸载。在完成经处理废物的卸载之后,在步骤3585中,以类似于步骤3550的方式来确定并记录滚筒的内容物重量。在步骤3590中,将所确定的滚筒的内容物重量与最小阈值容量进行比较。如果重量小于最小容量,则控制返回至步骤3510,并且废物处理机器110等待供应废物以继续其操作。在一些实施例中,最小重量阈值可以为50kg。
[0294]
图36是流程图,展示了图35的流程图中在步骤3570中提及的废物卸载触发的识别过程。评估滚筒230中的废物是否经过充分处理而能处置是取决于经处理废物的若干物理属性。适合于处置的废物应具有显著减小的水分含量。减小的水分含量允许经处理废物的长期存放,同时降低吸引害虫、或可能产生恶臭气体的生长或发霉或进一步分解的风险。水分含量减小还减小了经处理废物的总重量和体积,从而使进行最终处置所需的存放和运输更具能量效率。
[0295]
在一些实施例中,马达240汲取的最大功率可以用作滚筒230中的废物被处理到的程度的指示。马达240汲取的功率取决于废物处理混合器1400面临的阻力水平。在将废物装载到滚筒230中之后,废物处理混合器1400开始混合动作。随着废物的内容物被混合,由于混合动作,它们具有更稠且更粘的特性并且释放水分。随着混合动作继续,空气流经废物增强了废物中的水分蒸发。由于废物中的水分通过蒸发而失去,因此对废物处理混合器1400的阻力减小。在一些实施例中,由于水分的释放而使得阻力初始增大,然后由于水分失去而使阻力随后减小,形成了经处理废物的处置容易性的评估的一个基础。还可以通过其他传感器数据、比如滚筒湿度、滚筒中废物的重量、滚筒中废物的温度、以及关于废物的其他相关传感器数据来辅助对经处理废物的处置容易性的评估。
[0296]
在步骤3605中,控制器210获取滚筒230在时刻t和时刻t-10至t-1所汲取的功率。在步骤3610中,控制器210评估在时刻t汲取的功率是否大于在t-10至t-1之间的任何时刻汲取的功率。步骤3610大致上是在范围t-10至t上的后瞻性峰值评估。如果发现在时刻t汲取的功率小于在时刻t-10至t-1之间的任何时刻所汲取的功率,则控制器210推断在时刻t汲取的功率不是潜在峰值,并且控制转到步骤3650。在步骤3650中,控制器210等待下一个轮询触发事件返回到步骤3605,并且尝试识别另一个峰值。
[0297]
如果控制转到步骤3615,则在时刻t汲取的功率被控制器210识别为潜在峰值。随后,控制转到步骤3620,其中控制器210观察并记录在时间段t+1至t+5上汲取的功率。在步骤3625中,将时刻t汲取的功率与在时刻t+1至t+5汲取的功率进行比较。步骤3625大致上是
前瞻性峰值查询。如果观察到在时刻t+1至t+5之间的任何点处汲取的功率大于在时刻t汲取的功率,则控制器210推断在时刻t汲取的功率不是峰值,并且控制返回至步骤3650。然而,在时刻t+1至时刻t+5之间的所有时刻汲取的功率,则控制转到步骤3630,并且在时刻t汲取的功率被控制器210在某个时刻识别为峰值。在步骤3630之后,在步骤3635中,控制器210获取添加滚筒230的传感器值,比如湿度、从上一次输入以来滚筒230中失去的重量百分比、滚筒温度、空气流动速率、空气出口温度、空气入口温度、滚筒内的压力、和任何其他相关传感器数据。在步骤3640中,检查所获取的传感器数据是否在可接受的范围内,并且如果是,则在步骤3645中,控制器210开始废物卸载触发。另一方面,如果任何或一定数量的所获取参数不在可接受的范围内,则控制可以返回至步骤3650。
[0298]
控制器210生成废物卸载触发可能不能立即触发经处理废物的卸载。废物卸载触发被控制器210用作定时机构以在一定时间段之后开始卸载。由于滚筒230汲取的功率峰值指示了从具有较高阻力和粘度的重的含水分的滚筒内容物到更干燥且更轻的经处理废物的拐点;因此控制器210等待经过一定量的等待时间段,然后开始实际卸载。等待时间段等于与滚筒功率汲取峰值相关联的小值。在一些实施例中,等待时间段可以设定为5小时。在其他实施例中,该等待时间段可以在4小时至6小时之间。在其他实施例中,等待时间段可以随滚筒230中废物的初始重量或滚筒230中废物的初始重量的水分含量而变。
[0299]
在废物处理机器110仅用于处理特定类型的废物、例如来自鱼类加工厂的鱼残骸废物的某些实施例中,等待时间段可以针对该特定类型的废物来专门校准。这种校准可以基于该特定类型废物的水分含量、重量、近似密度、以及任何其他相关属性来进行。在一些实施例中,可以校准用于分析在步骤3610和3625中马达240所汲取的功率的时间范围,以使之最适合所处理的废物的性质。例如,在步骤3610中,滚筒所汲取的功率的后瞻性查询可以延长至20分钟,并且同样在步骤3625中的前瞻性查询可以延长至10分钟。在其他实施例中,步骤3610和3625的后瞻性和前瞻性查询范围可以分别考虑30分钟和20分钟的时间范围。
[0300]
图37展示了流程图3700,该流程图为在流程图3500的步骤3580中开始的废物卸载过程提供逻辑流。在开始废物卸载过程之后,控制器210检查箱接近度传感器950的输出信号以确定经处理废物收集箱3405是否就位来收集经处理废物。如果确定经处理废物收集箱没有在出口斜槽下方就位,则控制返回至步骤3570,并且在步骤3710中控制器210等待放置空的废物出口箱3405。如果在步骤3720中确定废物出口箱具有接收更多废物的容量,则控制器210命令废物铲送机构开始将废物穿过出口舱口卸载。然而,如果在步骤3720中确定废物出口箱已满,则控制转到步骤3750。在步骤3750中,控制器210生成指示废物出口箱已满的信号。控制器210可以将所生成的信号传达至特定的客户端装置140。例如,在通过客户端装置140接收到关于废物箱满的信号后,操作者或使用者可以开始将满的废物箱移除并且用空的废物箱来更换。
[0301]
当在步骤3730中卸载经处理废物时,在步骤3735中,箱深度传感器840间歇地检查废物出口箱是否已满。如果3735中的检查结果是确定废物出口箱已满,则在3740中,控制器210发出废物卸载箱3405已满的信号,并且随后控制返回至流程图3500的步骤3560。如果控制器210确定废物出口箱未满,则在步骤3730中,废物卸载过程恢复。
[0302]
图38是hmi 270的显示的示例性截图3800,展示了具有一些导航选项的主菜单和由控制器210监测的各个传感器数据的显示。图39是空气流动系统220中的加热器的配置菜
单的示例性截图3900。加热器配置菜单允许开启和关掉加热器、设定目标温度或将空气加热到的设定点温度。穿过加热器的空气的实际温度可能未达到目标温度。加热器配置菜单还允许设定截止温度以关掉加热器并且再次重启加热器。例如,截图3900展示了目标或设定点温度已经设定为60℃,而加热器截止温度已经设定为59.5℃(-0.5),并且加热器重启温度已经设定为59℃(-1)。
[0303]
图40是hmi 270的显示的示例性截图4000,展示了卸载配置菜单。该卸载配置菜单允许配置残渣铲子的操作速度、卸载风扇的速度,并且允许避开废物卸载箱存在传感器和废物卸载箱已满传感器。
[0304]
图41是hmi 270的显示的示例性截图4100,展示了装载机配置菜单。该装载机配置菜单包括按钮,这些按钮手动地允许升高和降下废物箱以及打开和关闭入口舱口。该装载机配置菜单还允许改变装载过程期间混合叶片移动的速度的变化、手动的装载指令与实际装载之间的延迟、和其他相关配置。
[0305]
图42是hmi 270的显示的示例性截图4200,展示了重量校准菜单。该重量校准菜单允许操作者配置废物处理机器110的最小和最大装载重量。该重量校准菜单还显示滚筒230的内容物的当前重量。
[0306]
图43是hmi 270的显示的示例性截图4300,展示了压力校准菜单。该压力校准菜单允许配置滚筒230内的空气压力的压力设定点。基于压力配置,控制器可以改变空气流动系统的操作以尝试在滚筒230内获得一定的空气压力。
[0307]
图44是hmi 270的显示的示例性截图4400,展示了卸载舱口配置菜单。该卸载舱口配置菜单允许操作者配置出口舱口的最大和最小操作位置。该卸载舱口配置菜单还允许手动地打开和关闭出口舱口。图45是hmi 270的显示的示例性截图4500,展示了重量变化显示菜单。该菜单展示了废物被处理时随时间的重量变化。图46是hmi 270的显示的示例性截图4600,展示了废物处理机器110的各个部件的功率消耗显示。
[0308]
图47是hmi 270或在客户端计算装置140上运行的应用程序的示例性截图,示出了根据关于图36和图37所描述的过程,废物处理机器110的各个操作参数随时间而变的曲线图。曲线图的x轴表示时间,而图表的y轴通过多个不同的曲线图表示来自单一废物处理机器110的多个传感器测量值。附图标记4710指示的绘制线表示测得的滚筒230中废物的重量,而附图标记4720指示的绘制线表示计算出的或测得的随时间而变的滚筒功率汲取。绘制线4720上的点4755是测得的滚筒功率汲取曲线图4720中的峰值的示例。当控制器210根据关于图36描述的过程检测到点4755处的峰值时,控制器210生成废物卸载触发事件,并且相关等待时间段开始。在一些实施例中,相关等待时间段可以是固定的时间段。在其他实施例中,相关等待时间可以随其他参数或操作条件(比如,滚筒的容量、在操作开始之前所装载的废物的实际重量、操作期间维持的温度、所装载的废物的性质、和任何其他相关指标)而变。附图标记4775指示的时间段是与峰值4755相关联的相关等待时间段。在所展示的示例中,等待时间段大致等于4小时。然而,例如,在其他实施例中,等待时间段可以是在约4小时至约12小时、比如约4至7小时、或约5至6小时范围内的选定时间段。例如,在另外的实施例中,等待时间段可以是在约6小时至12小时、比如约8小时至10小时范围内的选定时间段。
[0309]
附图标记4765指示测得重量曲线图4710中的急剧下降,其指示了与滚筒230的经处理废物的实际卸载相对应的重量快速减少。相比之下,附图标记4785指示了测得重量曲
线图4710中的急剧下降,其指示了与向滚筒230添加废物负载相对应的重量快速增加。
[0310]
图47描绘了空气加热器温度曲线图4725、腔室入口温度曲线图4726、和腔室出口温度曲线图4727。空气加热器温度曲线图4725指示了供应给滚筒230的温度范围。这个温度范围可以显著高于期望的腔室温度,以补偿通过行进到滚筒230的环境中和穿过腔室废物入口孔1065而失去的环境热量。相应地,如腔室入口温度曲线图4726所示的滚筒230的环境中的为约60℃或者在50与70℃之间的期望温度可能需要在170-190℃之间的空气加热器温度,从而产生180℃的中值空气温度。然而,在可以将富含自由基氧和/或电离氧的经加热空气中的热量损失最小化的情况下,可以显著地降低空气加热器温度,同时实现50至70℃(或优选地55至65℃)的目标温度范围。空气加热器温度4725的温度范围可以是使用者可配置的,以调节不同废物负载的理想分解温度。
[0311]
图47描绘了指示断电事件的时间事件4728。在该事件中,空气加热器温度曲线图4725指示了温度突然下降,而腔室入口温度曲线图4726和腔室出口温度曲线图4728由于留在滚筒230内的热量而遵循较慢的下降趋势。在该事件时,滚筒功率汲取4720立即下降为零,这指示了滚筒已经停止处理废物。可以触发比如时间事件4728所描绘的之类的断电事件,以达到维修、省电、或操作目的。
[0312]
图47描绘了指示低功率卸载操作的时间事件4729,其中滚筒重量曲线图4710指示了滚筒重量减小,而滚筒功率汲取4720下降至较低的功率水平,这可以指示马达420的rpm减小。在时间事件4729期间,空气加热器温度曲线图4725急剧下降,这指示了在时间事件4729期间停止加热。如时间事件4729指示的卸载操作可以允许继续处理,以减少废物负载分解的中断。
[0313]
在4726处显示了所跟踪数据的特定值,以获得使用者可选择时间。出于维护目的,该数据可以被存储和查看。在一些实施例中,在4726处显示的数据可以是指定的时间范围上的中值。
[0314]
废物处理机器110可以具有多种不同的逻辑状态,其中可以根据控制器210的指令来执行特定动作。在一些实施例中,机器可以具有以下状态:装载未处理废物状态、处理废物状态、卸载经处理废物状态、和待机状态。在装载未处理废物状态下,入口舱口1710可以打开以将未处理废物接收到混合滚筒230中。在处理废物状态下,废物处理混合器1400可以被操作以处理废物以及富含自由基氧或电离氧的空气。在卸载废物状态下,控制器210可以打开出口斜槽830、并且开始从混合滚筒230中移除经处理废物。在待机状态下,废物处理混合器1400可以停止废物的混合,并且电离器415可以停止操作而等待将更多未处理废物添加到混合滚筒230中。
[0315]
在一些实施例中,可以在滚筒中维持最小重量的残渣内容物。通过作为废物处理操作的启动器起作用,可以维持该最小重量以加快任何新添加的未处理废物的结构破碎。还可以维持该最小重量以加快新添加的未处理废物中的水分的释放,因为残渣内容物通常相对干燥并且被处理过。在一些实施例中,最小重量可以在20至300kg的范围内。在一些实施例中,最小重量可以在50至250kg的范围内。在一些实施例中,最小重量可以在100至200或220kg的范围内。废物处理机器可以具有在可接受范围内的残渣内容物最小重量的可配置值。在产生废物卸载触发事件之后进行废物卸载时,控制系统210可以卸载废物,使得滚筒中的残渣废物大致达到但不会变得低于所配置的最小重量值。
[0316]
图51描绘了废物处理混合器5100的替代性实施例,其构造和布置与图14描绘的实施例相似。在这个实施例中,沿着混合轴5105定位了三个混合叶片固定板。废物处理混合器5100的旋转方向用5101指示。附连至板上的混合叶片可以比其他实施例更长、并且延伸到滚筒腔室壁的5mm间隙内。第一、第二、和第三混合叶片固定板被定位成向废物负载提供混合、搅动和毁坏动作。在图51的实施例中,混合叶片臂可以比其他实施例延伸得更紧密靠近滚筒壁,从而将废物处理混合器5100的动作所影响的面积最大化。这可以允许废物处理混合器将废物残渣与否则将积聚在不期望区域中的主废物负载重新组合。
[0317]
在这个实施例中,第一混合叶片组件5110可以被定位远离出口舱口1100的端部上、并且被装配有多个犁叶片5112和桨叶叶片5111。图51e描绘了第一混合叶片组件5110的一个实施例,该第一混合叶片组件替代性地围绕中心混合叶片固定板具有三个犁臂5112和三个桨叶臂5111。犁臂5112可以包括混合臂和犁端5132,犁端5132具有一对成角度构件,这对成角度构件通过延伸板5134附连至混合臂上,从而允许犁到达腔室壁的5mm间隙。犁端的角度可以进一步允许滚筒内部上的废物残渣积淀物被刮除并且沿着叶片的长度转向、并且重新组合回到主废物负载中。
[0318]
图51c描绘了第三混合叶片组件5130的实施例,其可以安装成紧密靠近出口舱口1100。第三混合叶片组件5130可以包括与第一混合叶片组件5110基本上相似的构型,但是用具有残渣铲子5131的臂替换一个桨叶臂。这样的构型可以允许第三混合叶片组件5130对废物负载提供毁坏性和搅动动作两者,并且通过残渣铲子的动作来积极搅动、升高废物并对废物曝气。当出口舱口1100在废物卸载操作中部署好时,残渣铲子的动作将经处理的废物残渣沉积在部署好的出口舱口1100上。残渣铲子5131包括与实施例880基本上相似的构造,如之前描述的。
[0319]
可以通过叶片位置检测器来确定废物处理混合器的位置,该叶片位置检测器可以包括安装在马达240的外部壳体上的接近度传感器和定位轮。该定位轮可以包括附连至混合轴810的从滚筒延伸出的这端上的金属盘,该金属盘被布置成与混合轴810同步旋转。可以围绕定位轮的圆周在多个点处设置凹口,这些凹口根据混合叶片的位置来校准。在操作期间,定位轮旋转,并且这些凹口向接近度传感器指示叶片的位置。这允许该系统确保,混合叶片处于接收新的废物负载的最佳位置,否则将指示由于叶片的非预期位置而使叶片或混合轴中存在故障。
[0320]
图51d中描绘了第二混合叶片组件5120,该第二混合叶片组件具有围绕中心固定板定位的三个桨叶臂5121。第二混合叶片组件5120可以定位在第一与第三混合叶片组件之间、并且紧密靠近入口舱口,这些混合叶片之间的较大空间允许在输入舱口1710被升高时更多地触及新的废物负载。不存在犁端进一步将允许废物无阻碍地掉落到腔室中。第二混合叶片组件5120上没有犁端可以准许第一和第三组件的犁端无干扰地与第二组件重叠,从而在减少数量的犁的情况下提供更广的覆盖。
[0321]
在一些实施例中,桨叶臂5121、5111和5133包括金属混合臂,这些金属混合臂具有至少一个混合桨叶端5113、5122、和混合桨叶布置5114、5123、5135。该混合桨叶布置可以包括一对桨叶,这对桨叶使用适合的固定手段比如铆钉、螺钉或焊接来垂直地连结至混合叶片臂上。混合桨叶布置5114、5123、5135可以设置在沿着混合叶片臂长度的中途位置。混合桨叶布置的这种定位可以允许混合叶片搅动更大负载的废物残渣,这些残渣更靠近滚筒的
中部。在一些实施例中,可以在混合叶片臂上设置更大数量的桨叶布置,以辅助对大废物负载的搅动动作。
[0322]
图52描绘了空气流入气室组件5200的实施例。空气流入气室组件5200包括具有表面入口孔5220的表面入口板5210、空气流分离器5225、前部壳体5230、后部壳体5235、和入口管5240。经加热且经电离的空气通过连接至入口管5240的空气导管区段610被吹入组件中、并且接着被空气流分离器5225分离成多个空气流。经分离空气流将经加热且经电离的空气提供到腔室1005内的废物负载中。
[0323]
表面板(facing plate)5210可以包括矩形本体,其长度覆盖表面入口孔5220。例如,表面入口孔5220的长度可以大致相当于滚筒总长度(即,竖直端壁之间)的60%至90%之间。这可以提供经加热的经电离空气沿着滚筒的长度的均匀分布,由此辅助一致的废物处理。在表面板5210的长度中形成矩形槽缝以限定表面入口孔5220。
[0324]
表面板5210可以直接连接至滚筒230的外表面、并且可以具有与滚筒壁大致相同的曲率,其足以提供密封配合,由此将经加热的经电离空气在这两个表面之间的潜在泄露最小化。表面板5210可以通过螺钉、铆钉或其他固定手段来附连组件5200。在滚筒230中可以设置一系列孔,以允许分离的空气流被吹到腔室1005中。图57中更详细地描述了这些的一些实施例。这些孔可以与空气流入气室组件5200所提供的分离的五个空气流对准。在一些实施例中,可以提供更多或更少的孔洞和空气流。
[0325]
沿着表面板5210的上部长度设置了固定点5211阵列,这些固定点用作沿着滚筒壁外部的连接点的引导件、并且进一步引导入口遮挡件构件5310的附连器件。在一些实施例中,这些辅助于或用作点焊、铆接或其他附连手段的引导件。
[0326]
表面板5210沿着板的底边缘进一步包括一系列固定引导件5212。固定引导件5212包括至少一个槽缝,该至少一个槽缝在表面板5210的本体中形成、具有与固定螺钉螺纹相似的直径,使得表面板5210可以在螺纹上并且跨螺纹被开槽,由此在螺钉被拧紧时提供匹配的且一致的配合。这可以进一步辅助提供与滚筒壁外部的匹配的且齐平的配合。
[0327]
前部壳体5230包括平坦的表面面板、以及板支撑件5231。表面面板包括狭窄基部,该狭窄基部沿长度方向向外延伸至大致长度的表面入口孔5220。板支撑件5231在其具有与表面板5210大致相似的曲率的上边缘上包括成角度短柱。在其前边缘处,板支撑件5231的面可以是平坦的以将表面板5210的边缘连接至前部壳体5230的本体,由此在操作期间提供支撑并且减轻组件的振动和不对准。
[0328]
前部壳体5230的平坦表面板可以具有一定高度,使得当与后部壳体5235联接时在这两个部件之间形成空气出口,以准许空气流中有气流流经它们之间。在一些实施例中,这个空气出口可以具有与表面入口孔5220匹配的大小。在其他实施例中,出口空间可以比表面入口孔5220窄。
[0329]
后部壳体5235包括具有狭窄下端的本体,该狭窄下端沿长度方向朝向壳体的顶部延伸。该狭窄下端具有圆形槽缝,该圆形槽缝的直径与入口管5240的直径大致相同,由此允许在这两个部件之间实现匹配的配合。
[0330]
入口管5240可以包括弯折的管状区段,该弯折的管状区段能够与空气导管区段610对接并且提供气密性密封。
[0331]
后部壳体5235和前部壳体5230限定了内部空腔,该内部空腔的空间足以容纳空气
流分离器5225。在一些实施例中,空气流分离器5225包括至少四个分离器子气室5226,从而在被容纳在前部壳体和后部壳体的限定范围内时提供用于分离的空气的五个通道。在其他实施例中,根据滚筒总长度来提供更大数量的分离器子气室。这可以确保经加热的经电离空气流始终被递送至滚筒230内的废物负载的所有面积上。图52d描绘了空气流入气室组件5200的截面视图,描绘了在前部壳体和后部壳体的空腔内的空气流分离器5225并且为空气流限定了分离腔室。
[0332]
图53描绘为了气室遮挡件5300,该气室遮挡件附连至腔室1005内部以保护用于将经加热的经电离空气流提供到腔室中的孔。气室遮挡件5300包括附连至腔室壁5320上的遮挡件构件5310。气室遮挡件5300的轮廓可以是平坦的顶边缘,其中成角度部分在遮挡件5300与腔室壁之间限定了狭窄空间。遮挡件5300的角度可以进一步相对于第一角度通过轮廓中的朝向滚筒的壁的额外弯折来调节,以确保仅遮挡件从滚筒壁仅延伸小距离。这可以将遮挡件5300延伸至废物处理混合物的叶片臂的旋转路径内而由此造成阻塞的风险最小化。该最小距离可以进一步减轻经处理的废物残渣沿着遮挡件5300的面积聚。
[0333]
遮挡件构件5310的成角度轮廓可以进一步在处理期间将经加热的经电离空气流沿着腔室5320的壁向下引导到废物负载中,由此允许经加热的经电离空气流直接与废物负载混合。
[0334]
气室遮挡件5300可以包括多个空气流短柱5311。空气流短柱5311可以设置在腔室入口孔的每一侧,以将空气流进一步引导并分离到废物负载中。这可以辅助提供更一致的气流,而不是允许分离的流在递送到废物负载中之前合并。短柱5311可以进一步为气室遮挡件提供支撑,以辅助在废物处理操作期间抵抗遮挡件5300的移位。
[0335]
用于附连遮挡件构件5310的手段可以是螺钉、铆钉、或其他固定手段。气室遮挡件5300可以减少在入口孔处废物残渣的积聚,并且阻挡经加热的经电离空气流。遮挡件构件5310可以背离腔室壁5320成角度,从而允许在处理操作期间废物沿着其面落下。在此类实施例中,该遮挡件和孔被设置在与废物处理混合器的旋转角度互补的位置处,以将混合臂卡住遮挡件构件5310的边缘的风险最小化。
[0336]
图54描绘了排放气室组件5400,该排放气室组件包括排放气室壳体5410、壳体顶面板5420、壳体侧面板5425、排放挡板5415、和排放管5430。排放气室组件5400可以附连至滚筒230的顶部上、并且通过滚筒壁中的一系列排放孔来排放空气。在此类实施例中,通过空气的上升和排气风扇450在腔室内提供的负压,空气被向上抽吸穿过排放孔。已经对食物废物曝气并且随后变得更湿润的空气从处理腔室内穿过排放气室壳体5410、在排气风扇450产生的吸力下在排放挡板5415周围和上方循环并且穿过排放管5430离开。
[0337]
可以移除壳体顶面板5420和壳体侧面板5425,以允许清洁这些孔和排放气室壳体内部。
[0338]
排放挡板5415可以包括成角度遮挡件部分,其具有v形前导边缘。在一些实施例中,一对突出的矩形叉头可以从挡板的每个侧向端延伸一定长度,从而允许在壳体自身内齐平地整合。在其他实施例中,省略了这些叉头。
[0339]
在一些实施例中,在滚筒的顶部位置处设置了刮杆5810,该刮杆跨越了与图57中描绘的排放气室孔相似的大致长度。在一些实施例中,刮杆5810包括长形金属板或杆,在刮杆5810的最内刮铲边缘与其中一些或每个混合叶片的经过的叶片端部5840的最外边缘或
表面之间提供在1mm至5mm之间的间隙空隙。刮杆5810可以被定位在滚筒腔室的上部区域内,使得混合叶片臂(围绕旋转路径5815沿一个旋转方向行进)经过刮杆5810、然后才到达排放气室孔5720。刮杆5810可以减少在混合叶片到达排放气室孔5720的位置之前已经积聚在混合叶片上的过量废物残渣。这可以进一步减轻排放大的废物残渣颗粒,并且将在排放气室壳体5410自身内的废物残渣的积聚最小化。
[0340]
在一些实施例中,刮杆5810包括径向地向内延伸至刮铲区域的柔性橡胶刮片构件5820。柔性橡胶刮片构件5820可以具有足够的长度来与混合臂的旋转移动区域重叠,从而在一定程度上干扰经过的叶片端部5840。刮片构件5820是可充分弹性变形的,而能适应叶片端部5840的经过运动而不被损坏,同时具有足够的刚度而能刮下所积聚的废物残渣颗粒。这可以辅助将在叶片臂上和排放气室5410自身内的废物积聚最小化。
[0341]
图55描绘了hmi 270的显示5500,展示了具有一些导航选项的主菜单和由控制器210监测的各个传感器数据的显示。显示5500进一步描绘了在各个系统部件的顶部上的实时传感器信息,以辅助可读性。图55进一步描绘了空气进入数据显示5540、排放数据显示5510、箱位置指示器5520、和内部滚筒数据显示5530。显示元件的定位和图形性质可以辅助对系统当前状态的一眼识别。
[0342]
空气进入数据显示5540包括进入空气温度5541、进气功率汲取5543、和基本速度百分比5542、以及进入空气流动显示5544。5542描绘的基本速度百分比可以是针对一种废物负载的典型操作条件的设定值、或者可以是动态值。100%基本速度也可以是制造商设定的指示性额定值。在一些实施例中,可能优选的是,以高于或低于设定的100%额定值的情形来运行。
[0343]
空气进入数据显示5540进一步描绘了空气流动显示5544,其可以包括动画滚动条,图形地描绘了进入空气流动系统的速度或开/关操作。
[0344]
排放数据显示5510包括排放空气温度5511、排放功率汲取5513、基本速度百分比5512、和排放空气流动显示5514。5512描绘的基本速度百分比可以是针对一种废物负载的典型操作条件的设定值、或者可以是动态值。100%基本速度也可以是制造商设定的指示性额定值。在一些实施例中,可能优选的是,以高于或低于设定的100%额定值的情形来运行。参照空气进入数据显示5540和排放数据显示5510两者,排气风扇450的基本速度百分比可以设定为高于进气风扇420的值,以在滚筒腔室内产生负压,由此允许排气正确地穿过排放空气系统排出。
[0345]
空气进入数据显示5540进一步描绘了空气流动显示5544,其可以包括动画滚动条,图形地描绘了进入空气流动系统的速度或开/关操作。
[0346]
箱位置指示器5520显示了在出口斜槽830下方不存在箱。通过比较,图38描绘了hmi 207的显示的替代性实施例,其中在出口斜槽830下方检测到箱。
[0347]
内部滚筒数据显示5530包括滚筒空气温度5521、基本旋转速度百分比5522、和滚筒系统总功率汲取5523。可以包括动画滚动条5550以提供混合轴旋转速度的图形表示。
[0348]
图56是在废物卸载操作期间,电离器415的操作的流程图5600。空气阀425在正常处理操作下将气流引导至空气加热器430、并且在卸载操作下将气流引导至气刀组件460。在一些实施例中,电离器415在空气流动系统220中的空气阀425之前。在此类实施例中,可能优选的是,在卸载操作期间停止对电离器供电,以确保经电离空气不被气刀浪费。在5610
中,在控制器210的控制下,电离器415被供电并且工作,从而将氧电离以在废物处理中使用。在5620中,控制器210检测卸载操作是否已经开始,并且空气是否被阀425转向到气刀组件460。如果卸载操作还没开始,则在5630中继续对电离器415供电,直至卸载操作开始。如果在5620中已经开始卸载操作,并且阀425已经将气流改向至气刀组件460,则在5640中,控制器210对电离器415断电。在卸载操作期间对电离器415断电可以减轻电离氧的浪费,并且减小系统总功率汲取、以及将释放到滚筒之外的经电离空气的量最小化。在5650中,如果控制器210检测到卸载操作已经停止并且气刀组件460被脱接合,则控制器210使从电源280对电离器415的电力供应恢复。
[0349]
图57a描绘了用于本文描述的任何废物处理机器实施例的腔室护套5700(例如,处理滚筒的圆柱形部分)的替代性实施例,这可在透视图中看到并且没有端壁和附接的其他部件。腔室护套5700包括护套本体5710、排放气室孔5720和5725、流入气室孔5740、和废物入口孔5730。腔室护套5700可以包括与之前描述的腔室护套1010实施例基本上相似的大体圆柱形构造。腔室护套5700可以包括金属片,该金属片卷成圆柱形形式并且在连结部5715处例如通过焊接连接。如图57b所示,护套本体5710可以初始地被形成为平坦的金属片,该金属片接着卷成图57a所示的圆柱形形式。
[0350]
废物入口孔5730可以包括在护套总宽度的60-75%之间的孔、以及在护套展开的总长度的大致20-25%之间的高度。关于护套5700的圆柱形轮廓,废物入口孔5730可以跨越在45-90
°
之间(如沿着叶片绕之旋转的水平轴线看到的)的径向角,并被定位成相对于护套上的水平中点成0
°
开始、或者在起始点与高于或低于水平中点30
°
的任何其他地方之间的范围内。
[0351]
排放气室孔5720包括一个或一系列矩形排放槽缝,这些排放槽缝沿直线布置并且比废物入口孔5730更高地(例如,高出约150至250mm)周向定位。该一个或多个排放槽缝可以覆盖延伸超过废物入口孔5730的侧向尺寸一定长度的面积。在一些实施例中,护套本体5710的侧向长度可以为大约1100mm。排放槽缝的面积可以跨越腔室护套本体5710的圆柱形总长度(如沿着叶片绕之旋转的水平轴线看到的)的60-95%之间的大致长度。例如,对于1100cm的滚筒宽度,排放槽缝可以跨越890cm的长度,占总宽度的大致81%。因此,这些排放槽缝跨越的大致长度可以在例如圆柱形总长度的约70-90%或75-85%的范围内。矩形排放槽缝的数量可以取决于滚筒尺寸而变化。在一些实施例中,矩形排放槽缝可以包括七个槽缝。排放槽缝可以被腔室护套本体5710的连接板或桥接部分分隔。连接板或桥接部分可以均匀地分布在护套本体5710的整个圆柱形长度上,并且在一些实施例中可以限定比剩余部分更小的(更加方形的)两个端部排放孔5725。这可以确保在护套每一侧上具有足够支撑,从而维持结构完整性。在一些实施例中,排放气室孔槽缝包括75x 100mm的孔,其中端部孔5725包括75x 75mm的孔。在其他实施例中,排放气室孔可以具有更大或更小的大小或者其数量可以更大或更小。关于护套本体5710的圆柱形轮廓,排放气室孔5720可以定位成相对于护套上的水平中点成90
°-
120
°
之间。
[0352]
流入气室孔5740包括一个或一系列矩形入口槽缝,这些入口槽缝沿着周向地低于废物入口孔5730(例如,低了约150-250mm)的直线布置,这些入口槽缝延伸超过废物入口孔5730的侧向尺寸一定长度。该一个或多个入口槽缝可以跨越在腔室护套本体5710的圆柱形总长度的60-90%或50-80%之间的大致长度。例如,对于1100cm的滚筒宽度,废物入口孔
5730可以跨越660mm的长度,占滚筒总宽度的大致60%。因此,这些内部槽缝跨越的大致长度可以在例如圆柱形总长度的约50-70%或55-65%的范围内。矩形入口槽缝的数量可以取决于滚筒尺寸而变化、并且对应于比空气流入气室组件5200的导片数量多一个,使得每个分离的空气流可以与流入气室孔5740之一对准。在一些实施例中,流入气室孔5740可以包括五个30mm x 100mm的槽缝。在其他实施例中,流入气室孔可以具有更大或更小的大小或者其数量可以更大或更小。关于护套本体5710的圆柱形轮廓,流入气室孔5730可以被定位在护套的水平中点处、或者在水平中点上方20
°
或下方45
°
。
[0353]
本领域技术人员应了解的是,在不脱离本披露的宽的一般范围的情况下,可以对上述实施例作出多种改变和/或修改。因此,本实施例在所有方面都应被认为是展示性的而不是限制性的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1