一种自动对焦的激光清洗装置的制作方法
1.本发明涉及激光清洗领域,特别是涉及一种自动对焦的激光清洗装置。
背景技术:
2.传统的清洗方法主要有三种:机械清洗法、湿法化学清洗和超声波清洗法。目前这三种清洗方法在我国清洗市场中仍占主导地位,但是它们也存在一些不尽如人意的地方,如机械方法无法满足高洁净度清洗要求,容易损伤被清洗工件表面;化学清洗方法对环境污染严重,而且污垢成分比较复杂时必须采用多种清洗剂反复清洗,才能满足表面洁净度的要求等。尤其是对于一些清洗难度比较大的物品,如橡胶塑料模具的清洗,这些传统的清洗方法便显得无能为力。
3.近些年激光技术的蓬勃发展解决了这些难题,激光清洗技术利用激光特有的一些物化特性,尤其适合清洗粘有一些有机物污垢的物品,并且可以实现在线清洗。由于激光清洗技术不会对环境产生危害,所以该技术一出现就引起了人们的重视,展示了其广阔的应用于发展前景。
4.现有激光清洗技术扫描系统是由单个振镜或双振镜来实现单线或二维清洗,单线清洗容易损伤基底,二维清洗则需要使振镜垂直交叉固定,体积和重量都比较大,在相对狭小的空间不易施展,并且手持时间一长也会比较吃力。现有激光清洗技术的聚焦系统通过聚焦场镜来实现清洗金属表面污染层,根据使用不同焦距场镜的光学特性,激光束在聚焦位置一般有1
‑
4mm的焦深,为保持清洗效率,在清洗时必须保证焦点位置变化不超过焦深范围。传统激光清洗方式采用手持清洗头通过肉眼观察并实时调节激光器手持头到清洗面的距离来保持焦距,不能满足现代化工业生产高效率和高度自动化的需求,而且当遇到清洗面波折度不规律的情况时,焦点难以保持,清洗效果较差。而自动对焦清洗装置及方案则克服现有激光清洗的不足,采用同轴空心电机和楔形镜的组合方案代替扫描振镜(电机+反射镜)方案,可以实现圆形幅面的二维清洗。即可避免单轴振镜单线扫描损伤基地的缺点,又能克服双轴振镜体积和重量大的不足。并且增加了自动对焦功能又可以使操作人员清洗时不必考虑焦距问题,降低了清洗难度,提高了清洗效率及设备的实用性
技术实现要素:
5.本发明主要的目的是解决现有激光清洗技术的缺点,提供一种自动对焦的激光清洗装置及清洗方案,不仅解决了传统激光清洗手持清洗头难以保持焦距,导致清洗效果差、清洗效率低的问题,又使用同轴双转动楔形镜代替垂直交叉扫描振镜的扫描系统,使体积和重量都得以缩小,操作人员使用更便捷,实用性更佳。
6.本发明的技术解决方案如下:
7.一种自动对焦的激光清洗装置,包括激光发生系统、扫描系统聚焦系统、自动对焦系统和控制系统,其特征在于,还包括第一固定件和第二固定件;
8.所述的激光发生系统由激光器和隔离器组成,由激光器输出的的激光,经隔离器
准直后,输出准直光;
9.所述的扫描系统与所述的隔离器通过所述的第一固定件固定连接,所述的聚焦系统与自动对焦系统通过第二固定件固定连接;
10.所述的控制系统通过数据传输线分别与所述的激光发生系统、扫描系统和自动对焦系统连接并进行控制。
11.所述的扫描系统包括两块楔形镜,每块楔形镜连接有同轴的空心电机,该空心电机的外圈为定子,内圈为转子,两个楔形镜分别固定在内圈转子中心,所述的两个空心电机的外圈通过所述的第一固定件与隔离器固定,该隔离器的光轴与空心电机的转轴同轴,确保准直光垂直穿过两个楔形镜。
12.所述的楔形镜是一种带有倾角斜面的光学棱镜,且该楔型镜两面的倾角小于2度,使入射光向较厚的一边偏折。
13.所述的聚焦系统由f
‑
theta场镜构成,所述的f
‑
theta场镜通过第二固定件固定在所述的自动对焦系统上,使准直后的激光聚焦在焦平面上,即使焦平面上的激光能量密度达到清洗阈值。
14.所述的自动对焦系统包括测距模块和微型丝杆滑台,该微型丝杆滑台通过第二固定件固定在所述的聚焦系统上,控制聚焦系统的位置。
15.所述的控制系统包括电机驱动器和控制板卡,能够控制激光发生系统开光激光和参数设定、扫描系统的关停和速度设定、自动对焦系统的距离数据接收和微型丝杆滑块位置距离设定。
16.与现有技术相比,本发明的优势是:
17.1、具备自动对焦功能,可以实时动态调节聚焦系统的位置,解决了传统激光清洗手持清洗头难以保持焦距,导致清洗效果差、清洗效率低的问题。
18.2、采用同轴双转动楔形镜代替垂直交叉扫描振镜的扫描系统,即保证了被清洗物的基底不受损伤,又大幅缩小了清洗装置的体积和重量,在狭小空间也可以使用,操作人员使用更便捷,使用环境更丰富。
附图说明
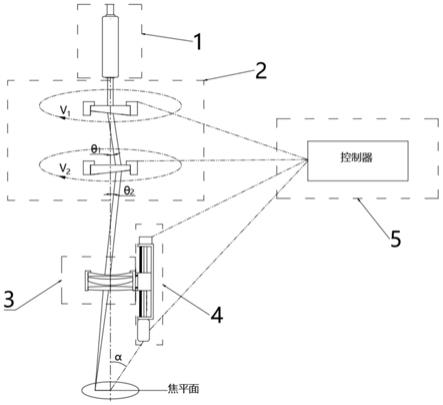
19.图1为本发明激光清洗装置的工作原理示意图;
20.图2为本发明自动对焦的激光清洗装置的结构示意图;
21.图3为本发明光束通过旋转楔形镜的工作原理示意图;
22.图4为本发明自动对焦模块结构示意图。
23.图中,1
‑
激光隔离器、2
‑
扫描系统、3
‑
聚焦系统、4
‑
自动焦系统、 5
‑
控制系统、6
‑
第一固定件、7
‑
第二固定件、8
‑
丝杆滑台、9
‑
测距模块、 10
‑
步进电机
具体实施方式
24.下面结合附图和实施例对本发明作进一步说明,但不应以此限制本发明的保护范围。
25.请参阅图1和2,一种自动对焦的激光清洗装置,如图所示,一种自动对焦的激光清洗装置及清洗方案,包括激光隔离器1、扫描系统2、聚焦系统3、自动对焦系统4、控制系统构
成5、第一固定件6、第二固定件7。所述激光激光隔离器将准直后的激光穿过扫描系统2的两面楔形镜后再穿过聚焦系统后进行聚焦。
26.所述扫描系统2由2个同轴的空心电机带动2个楔形镜组成。其中空心电机外圈为定子,内圈为转子,而楔形镜是一种带有倾角斜面的光学棱镜,楔型镜两面的倾角比较小,它能够使得光路向较厚的一边偏折。两个楔形镜分别固定在内圈转子中心。两个空心电机外圈通过第一固定件与隔离器固定,并保证隔离器出光轴与空心电机转轴同轴,使准直光可以垂直穿过两个楔形镜。请参阅图3,激光穿过第1面楔形镜后按角度θ1进行偏转,偏转后的准直光再穿过第2面楔形镜进行按θ2进行二次偏转。两面楔形镜分别固定在两个空心电机中心并由转子进行旋转,其中两个空心电机的转速v1和v2保持恒定且不同,这使得θ2的角度不断变化。
27.所述聚焦系统3由f
‑
theta场镜构成,f
‑
theta场镜由3块透镜组合而成,通过工装固定在自动对焦系统的微型丝杆滑台上,通过楔形镜的激光穿过聚焦系统后,在焦点位置能量达到最强,从而起到清洗效果。
28.如图4所示,本发明自动对焦系统结构示意图包括丝杆滑台8、测距模块9、步进电机10及第二固定件7,其中微型丝杆滑台8与聚焦系统3通过第二固定件7连接并固定,电机可转动丝杆滑台带动聚焦系统上下伸缩运动。图1所示,当微型丝杆滑台电机处于零位时,确保聚焦系统焦平面中心与测距模块测量点重合,此时测距模块初始测量距离是 l,测距方向与隔离器出光轴呈α角。当使用清洗装置时,一旦测距模块实时测量距离m≥l,微型丝杆滑台则控制聚焦系统伸出(m
‑
l)*cos α的距离。反之,若测量距离m<l,微型丝杆滑台则控制聚焦系统缩短(m
‑
l)*cosα的距离。通过控制聚焦系统的伸缩位置保证了激光清洗焦点始终落在清洗面上,确保清洗效果,提升清洗效率。
29.所述控制系统5由电机驱动器和控制板卡组成,其中共有3个电机驱动,分别驱动2个空心电机和1个微型丝杆上的步进电机,2个空心电机保持固定的速度差,控制板卡可以接受测距模块的距离值,再进行计算后控制步进电机转动微型丝杆滑台进而控制聚焦系统的伸缩。控制板卡同时具备控制激光发生系统的开关光及参数调节功能。
30.清洗过程如下,首先将工件放置,再开启电源给清洗装置供电,打开控制系统5设定激光器参数及扫描系统2参数,将清洗装置出光口正对待清洗工件保持不动,此时自动对焦系统的测距模块会测量清洗头距离待清洗工件的距离,再将实测值反馈给控制系统,控制系统会下达指令控制自动对焦系统带动聚焦系统伸缩运动,从而保证焦点落在待清洗工件上,然后开启激光进行清洗工作。在清洗过程中自动对焦系统是实时工作的,即使清洗过程中激光失焦也能通过自当对焦系统迅速对焦。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1