一种自动清洁履带的管道清洁机器人的制作方法
[0001]
本实用新型涉及管道清洁技术领域,特别涉及一种自动清洁履带的管道清洁机器人。
背景技术:
[0002]
空调管道在日积月累的使用过程中,容易积累大量的灰尘,从而影响空调的正常运行。然而空调管道通常较长且位于墙壁、吊顶等人工较难操作的地方,通过人工进行管道清洁,存在清洁麻烦、难以清洁干净且清洁费用较高等问题。因此,现有技术开始研发小型的清洁机器人,通过清洁机器人在管道内一边行走一边清洁,从而对空调管道进行有效的清洁。
[0003]
比如现有的大部分空调管道采用镀锌板材质制成的方管,通过强磁爬行方式的清洁机器人在镀锌管内爬行清洁,其中,强磁爬行方式可增加负载量和爬行稳定性。但爬行稳定性取决于强磁片与镀锌管之间的磁力,若强磁片在爬行过程中积灰而导致强磁片与空调管道之间的磁力下降,则会影响清洁机器人的爬行稳定性。
技术实现要素:
[0004]
本实用新型所要解决的技术问题是:提供一种自动清洁履带的管道清洁机器人,对强磁片上的灰尘进行清理,以增加管道清洁机器人的爬行稳定性。
[0005]
为了解决上述技术问题,本实用新型采用的技术方案为:
[0006]
一种自动清洁履带的管道清洁机器人,包括履带式行走机构以及清洁装置,所述履带式行走机构包括履带以及位于所述履带表面的强磁片;
[0007]
所述清洁装置与所述强磁片接触。
[0008]
进一步地,还包括车身,所述清洁装置的一端与所述车身固定连接且另一端与所述强磁片接触;
[0009]
每一片所述强磁片在所述履带的转动过程中至少与所述清洁装置接触过一次。
[0010]
进一步地,所述履带在所述车身的两侧各设置有一个,所述车身的两侧分别固定有至少一个所述清洁装置;
[0011]
位于同侧的所述清洁装置与所述强磁片接触。
[0012]
进一步地,所述清洁装置为毛刷装置,所述毛刷装置的一端固定在所述车身上,且另一端上设置有与所述强磁片接触的刷毛。
[0013]
进一步地,所述刷毛在所述毛刷上排列分布,且相邻两列的所述刷毛之间的间距s大于b且小于b+2a,所述a为相邻两片所述强磁片之间的间距,所述b为所述强磁片的宽度。
[0014]
进一步地,所述刷毛位于所述履带的上方,且垂直于所接触的所述强磁片。
[0015]
进一步地,所述刷毛的长度大于所述刷毛所在的端面与相邻两片所述强磁片之间的间隙底部之间的高度。
[0016]
本实用新型的有益效果在于:一种自动清洁履带的管道清洁机器人,在强磁片随
着履带转动时,由于清洁装置与强磁片接触,使得清洁装置对强磁片上的灰尘进行清理,以避免强磁片因积灰而导致的磁力下降现象,从而增加管道清洁机器人的爬行稳定性。
附图说明
[0017]
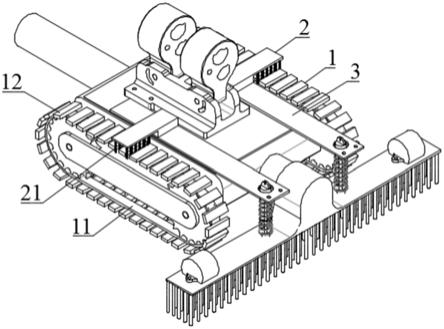
图1为本实用新型实施例的一种自动清洁履带的管道清洁机器人的立体示意图;
[0018]
图2为本实用新型实施例的一种自动清洁履带的管道清洁机器人的侧面示意图;
[0019]
图3为图2中区域a的放大示意图。
[0020]
标号说明:
[0021]
1、履带式行走机构;2、毛刷装置;3、车身;11、履带;12、强磁片;21、刷毛。
具体实施方式
[0022]
为详细说明本实用新型的技术内容、所实现目的及效果,以下结合实施方式并配合附图予以说明。
[0023]
请参照图1至图3,一种自动清洁履带的管道清洁机器人,包括履带式行走机构以及清洁装置,所述履带式行走机构包括履带以及位于所述履带表面的强磁片;
[0024]
所述清洁装置与所述强磁片接触。
[0025]
从上述描述可知,本实用新型的有益效果在于:在强磁片随着履带转动时,由于清洁装置与强磁片接触,使得清洁装置对强磁片上的灰尘进行清理,以避免强磁片因积灰而导致的磁力下降现象,从而增加管道清洁机器人的爬行稳定性。
[0026]
进一步地,还包括车身,所述清洁装置的一端与所述车身固定连接且另一端与所述强磁片接触;
[0027]
每一片所述强磁片在所述履带的转动过程中至少与所述清洁装置接触过一次。
[0028]
从上述描述可知,即清洁装置固定在车身的某个位置上,通过强磁片与清洁装置之间的相对运动来清理强磁片上的灰尘。
[0029]
进一步地,所述履带在所述车身的两侧各设置有一个,所述车身的两侧分别固定有至少一个所述清洁装置;
[0030]
位于同侧的所述清洁装置与所述强磁片接触。
[0031]
从上述描述可知,即每一侧的履带都有其对应的清洁装置进行灰尘清理。
[0032]
进一步地,所述清洁装置为毛刷装置,所述毛刷装置的一端固定在所述车身上,且另一端上设置有与所述强磁片接触的刷毛。
[0033]
从上述描述可知,采用毛刷装置,在不影响强磁片的正常工作下,对强磁片上的灰尘进行清理。
[0034]
进一步地,所述刷毛在所述毛刷上排列分布,且相邻两列的所述刷毛之间的间距s大于b且小于b+2a,所述a为相邻两片所述强磁片之间的间距,所述b为所述强磁片的宽度。
[0035]
从上述描述可知,若刷毛之间的间距太小,则较多的刷毛与强磁片进行接触,影响爬行,若刷毛之间的间距太大,则容易造成清理效果不佳,即将刷毛之间的间距进行上述限定,能保证在不影响强磁片的正常工作下,对强磁片上的灰尘进行有效的清理。
[0036]
进一步地,所述刷毛位于所述履带的上方,且垂直于所接触的所述强磁片。
[0037]
从上述描述可知,垂直设计,简单且能保持有效接触面积,从而保证清理效果。
[0038]
进一步地,所述刷毛的长度大于所述刷毛所在的端面与相邻两片所述强磁片之间的间隙底部之间的高度。
[0039]
从上述描述可知,限定刷毛的长度,使得刷毛能和强磁片之间的间隙底部接触,从而对强磁片之间的间隙内的灰尘进行有效的清理。
[0040]
请参照图1至图3,本实用新型的实施例一为:
[0041]
一种自动清洁履带的管道清洁机器人,包括车身3、履带式行走机构1以及清洁装置,履带式行走机构1包括履带11以及位于履带11表面的强磁片12;其中,清洁装置的一端与车身3固定连接且另一端与强磁片12接触。使得强磁片12随履带11转动时,清洁装置对强磁片12上的灰尘进行清理。
[0042]
如图1所示,履带11在车身3的两侧各设置有一个,车身3的两侧分别固定有一个清洁装置,位于同侧的清洁装置与强磁片12接触。在其他实施例中,可考虑在一侧设置多个清洁装置。
[0043]
如图1所示,清洁装置为毛刷装置2,毛刷装置2的一端固定在车身3上,且另一端上设置有与强磁片12接触的刷毛21。具体的,刷毛21位于履带11的上方,且垂直于所接触的强磁片12。
[0044]
结合图2和图3可知,刷毛21在毛刷上排列分布,且相邻两列的刷毛21之间的间距s大于b且小于b+2a,a为相邻两片强磁片12之间的间距,b为强磁片12的宽度。同时,刷毛21的长度大于刷毛21所在的端面与相邻两片强磁片12之间的间隙底部之间的高度,使得刷毛21能和强磁片12之间的间隙底部接触,从而对强磁片12之间的间隙内的灰尘进行有效的清理。
[0045]
综上所述,本实用新型提供的一种自动清洁履带的管道清洁机器人,在强磁片随着履带转动时,由于毛刷装置与强磁片接触,同时对刷毛之间的间距和刷毛的高度进行限定,能保证在不影响强磁片的正常工作下,对强磁片上以及强磁片之间的间隙内的灰尘进行有效清理,以避免强磁片因积灰而导致的磁力下降现象,从而增加管道清洁机器人的爬行稳定性。
[0046]
以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等同变换,或直接或间接运用在相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1