一种平单轴减震清扫机器人的制作方法
1.本实用新型一般涉及平单轴清扫设备技术领域,具体涉及一种平单轴减震清扫机器人。
背景技术:
2.光伏组件一般安装在室外,在经过不断的风吹日晒后,其表面难免吸附灰尘,人工清理较为不便,因此通常需要借助清扫机器人进行清扫。
3.平单轴跟踪支架结构,由于成本考虑,光伏组件的铝合金支撑边框越来越薄,清扫机器人重量越重,对光伏组件的下压量就越大;同时由于结构及施工的影响,两光伏组件间通常具有空隙,当清扫机器人在行进跨越两个光伏组件的过程中,光伏组件的就会高低起伏产生振动,下压量越大振幅越大,对光伏组件的损伤越大;
4.现有技术中,清扫机器人每侧只安装有两个行走轮,两个行走轮的高度相同;一般状态下,当清扫机器人放置于一块光伏板上时,光伏板会有10~15mm下压量,当最前端行走轮进入下一块光伏板时,下一块光伏板具有10~15mm的下压量,上一块光伏板具有10~15mm的抬升量。因此清扫机器人行进过程中对组件的冲击较大,光伏组件产生了较大振动。
技术实现要素:
5.鉴于现有技术中的上述缺陷或不足,期望提供可减轻光伏组件振动,增强爬坡能力,减少光伏组件损伤的一种平单轴减震清扫机器人。
6.本实用新型提供一种平单轴减震清扫机器人,用于清扫光伏组件,所述光伏组件的下压量为a,所述平单轴减震清扫机器人包括两个行走装置以及安装在两个所述行走装置间的清扫装置;
7.所述行走装置包括:行走装置本体;所述行走装置本体侧壁靠近底部安装有两个镜像设置的行走轮组,每个所述行走轮组包括至少两个行走轮;相邻两个所述行走轮间的高度差为a/n,n为每个行走轮组中行走轮的数量;处于外侧的行走轮高于内侧的行走轮。
8.根据本技术实施例提供的技术方案,每个所述行走轮组包括两个所述行走轮,分别为第一行走轮以及第二行走轮。
9.根据本技术实施例提供的技术方案,所述行走装置本体内设有驱动装置;所述驱动装置包括驱动电机,所述驱动电机的转轴与两个所述第一行走轮通过第二驱动链条传动连接;所述第二行走轮与所述第一行走轮通过行走链条传动连接。
10.根据本技术实施例提供的技术方案,所述行走装置本体内安装有链条胀紧机构,所述链条胀紧机构与所述第二驱动链条传动连接。
11.根据本技术实施例提供的技术方案,所述链条胀紧机构包括:转向轮、调节板、固定块以及锁紧螺杆;所述固定块安装在所述行走装置本体内,所述锁紧螺杆穿过所述固定块与所述调节板固定连接,所述固定块与所述锁紧螺杆通过螺纹连接,所述转向轮安装在所述调节板上,所述转向轮与所述第二驱动链条传动连接。
12.根据本技术实施例提供的技术方案,所述清扫装置包括:毛刷电机、毛刷轴;两个所述行走装置本体侧壁上均安装有毛刷轴承座,所述毛刷轴两端分别安装在两个所述毛刷轴承座内,使得所述毛刷轴可在所述毛刷轴承座内转动;所述毛刷轴上安装有毛刷,所述毛刷电机的转轴与所述毛刷轴通过第一驱动链条传动连接。
13.根据本技术实施例提供的技术方案,所述行走装置本体底部安装有若干个纠偏轮。
14.本实用新型的优点在于:本实用新型提供一种平单轴减震清扫机器人包括两个行走装置以及安装在两个所述行走装置间的清扫装置;由于所述行走装置本体侧壁靠近底部安装有两个镜像设置的行走轮组,每个所述行走轮组包括至少两个行走轮;相邻两个所述行走轮间的高度差为a/n,n为每个行走轮组中行走轮的数量;处于外侧的行走轮高于内侧的行走轮。
15.将所述平单轴减震清扫机器人放置在第一块光伏组件上时,由于清扫机器人重力及光伏组件材质等因素,第一块光伏组件具有a的下压量,使得第一块光伏组件与第二块光伏组件间具有高度为a的高度差,当所述平单轴减震清扫机器人跨越两光伏组件缝隙进入第二块组件时,由于相邻两个所述行走轮间的高度差为a/n,使得最前端行走轮进入到第二块光伏组件时,第二块光伏组件具有a/n的下压量,随着所述清扫机器人继续向前行走,下一个行走轮进入到第二块光伏组件时,对第二块光伏组件又有a/n的下压量,直到前端的行走轮组完全进入第二块光伏组件;
16.同理当所述清扫机器人离开第一块光伏组件时,前端的行走轮组中各行走轮对第一块光伏组件有a/n的抬升量,因此上述结构中,当所述清扫机器人跨越两个光伏组件时,光伏组件每次的振动幅度为 a/n。
17.现有技术中,行走结构为两个高度相同的行走轮,这就导致前端行走轮进入第二块光伏组件时,使得第二块光伏组件具有a的下压量,当处于末端的行走轮离开第一块光伏组件时,第一块光伏组件具有a 的抬升量,光伏组件每次的振动幅度为a。
18.与现有技术相比,本实用新型提供的一种平单轴减震清扫机器人跨越光伏组件的行走过程中对组件的冲击较小,光伏组件所产生的振动幅度较小,对光伏组件的损伤较小。
附图说明
19.通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本技术的其它特征、目的和优点将会变得更明显:
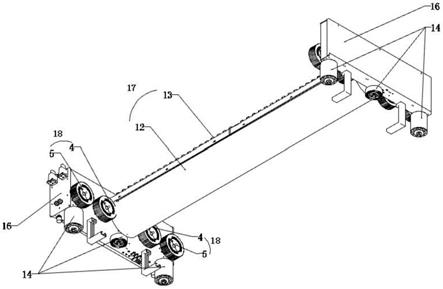
20.图1为本实用新型提供的平单轴减震清扫机器人结构示意图;
21.图2为图1所示清扫机器人放置在第一光伏组件20上的结构示意图;
22.图3为图1所示清扫机器人进入第二光伏组件21上的结构示意图;
23.图4为图1所示清扫机器人位于第一光伏组件20以及第二光伏组件21上的结构示意图;
24.图5为图1所示行走装置16的主视结构示意图;
25.图6为图1所示行走装置16的后视结构示意图;
26.图7为图1所示清扫机器人的主视结构示意图;
27.图8为图1所示清扫机器人的俯视结构示意图;
28.图中标号:
29.1、行走装置本体;2、驱动电机;3、毛刷轴承座;4、第一行走轮;5、第二行走轮;6、第一驱动链条;7、第二驱动链条;8、行走链条;9、转向轮;10、调节板;11、固定块;12、毛刷轴;13、毛刷; 14、纠偏轮;15、毛刷电机;16、行走装置;17、清扫装置;18、行走轮组;19、锁紧螺栓;
具体实施方式
30.下面结合附图和实施例对本技术作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关发明,而非对该发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与发明相关的部分。
31.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
32.实施例1
33.请参考图1为本实用新型提供的一种平单轴减震清扫机器人,用于清扫光伏组件,所述光伏组件的下压量为a,所述平单轴减震清扫机器人包括两个行走装置16以及安装在两个所述行走装置16间的清扫装置17;
34.所述行走装置16包括:行走装置本体1;所述行走装置本体1侧壁靠近底部安装有两个镜像设置的行走轮组18,每个所述行走轮组18 包括至少两个行走轮;相邻两个所述行走轮间的高度差为a/n,n为每个行走轮组中行走轮的数量;处于外侧的行走轮高于内侧的行走轮。
35.具体的,两个所述行走轮组18沿所述行走装置本体1中间位置镜像设置;具体的,每个所述行走轮沿行走方向排列设置。
36.具体的,所述光伏组件的下压量a与清扫机器人的重量以及光伏组件的材质有关,通常情况下,光伏组件的下压量a为10~15mm;
37.具体的,每个所述行走轮组18包括至少两个行走轮,即可以为两个、三个或多个;优选的,基于成本及负重的综合考虑,每个所述行走轮组18可设置两个所述行走轮,即n=2。
38.工作原理:为了更清楚的描述本实用新型工作原理,以n=2为例,跨越两个光伏组件表示为第一光伏组件20以及第二光伏组件21:
39.如图2所示,将所述平单轴减震清扫机器人放置在第一光伏组件 20上时,由于重力、光伏组件材质等因素,第一光伏组件20具有a 的下压量,使得第一光伏组件20与第二光伏组件21间具有高度为a 的高度差;
40.如图3所示,当所述平单轴减震清扫机器人跨越两光伏组件缝隙进入第二光伏组件时21,由于相邻两个所述行走轮间的高度差为a/2,使得最前端行走轮进入到第二光伏组件21时,第二光伏组件21具有 a/2的下压量;
41.如图4所示,随着所述清扫机器人继续向前行走,下一个行走轮进入到第二光伏组件21时,对第二光伏组件21又有a/2的下压量,此时前端的行走轮组18完全进入第二光伏组件21;
42.本领域其他工作人员可以知道的是,由于所述行走轮组18镜像设置,同时所述清
扫机器人的质心位于两个所述行走轮组18之间,因此处于后端的行走轮组18进入第二光伏组件21时,对第二光伏组件21 不会产生下压量。
43.同理当所述清扫机器人离开第一光伏组件20时,后端的行走轮组 18中各行走轮对第一光伏组件20有a/2的抬升量,因此上述结构中,当所述清扫机器人跨越两个光伏组件时,光伏组件每次的振动幅度为 a/n。
44.现有技术中,行走结构为两个高度相同的行走轮,这就导致前端行走轮进入第二光伏组件21时,使得第二光伏组件21具有a的下压量,当处于末端的行走轮离开第一光伏组件20时,第一光伏组件20 具有a的抬升量,光伏组件每次的振动幅度为a。
45.与现有技术相比,本实用新型提供的一种平单轴减震清扫机器人跨越光伏组件的行走过程中对组件的冲击较小,光伏组件所产生的振动幅度较小,对光伏组件的损伤较小。
46.其中,在所述行走轮组18的优选实施方式中,如图5、图6及图 8所示,每个所述行走轮组18包括两个所述行走轮,分别为第一行走轮4以及第二行走轮5。
47.通过将每个所述行走轮组18设置两个所述行走轮,使得可降低装置的负重,同时便于对所述行走轮进行驱动控制。
48.其中,在所述行走装置本体1的优选实施方式中,如图5所示,所述行走装置本体1内设有驱动装置;所述驱动装置包括驱动电机2,所述驱动电机2的转轴与两个所述第一行走轮4通过第二驱动链条7 传动连接;所述第二行走轮5与所述第一行走轮4通过行走链条8传动连接。
49.当所述驱动电机2正常工作时,驱动电机2转轴转动,由于所述驱动电机2的转轴与两个所述第一行走轮4通过第二驱动链条7传动连接,使得所述第一行走轮4随之转动;同时所述第二行走轮5通过所述行走链条8同步转动。
50.其中,在所述行走装置本体1的优选实施方式中,所述行走装置本体1内安装有链条胀紧机构,所述链条胀紧机构与所述第二驱动链条7传动连接。
51.具体的,所述链条胀紧机构用于调节所述第二驱动链条7松紧度,使所述第二驱动链条7处于胀紧状态。
52.其中,在所述链条胀紧机构的优选实施方式中,如图6所示,所述链条胀紧机构包括:转向轮9、调节板10、固定块11以及锁紧螺杆 19;所述固定块11安装在所述行走装置本体1内,所述锁紧螺杆19 穿过所述固定块11与所述调节板10固定连接,所述固定块11与所述锁紧螺杆19通过螺纹连接,所述转向轮9安装在所述调节板10上,所述转向轮9与所述第二驱动链条7传动连接。
53.具体的,通过调节所述锁紧螺杆19,使得可调节所述固定块11 与所述调节板10的距离,进而使所述第二驱动链条7胀紧,防止第二驱动链条7不断运行的过程中链条被拉长,而出现跳齿现象。
54.其中,在所述清扫装置17的优选实施方式中,如图5、图6所示,所述清扫装置17包括:毛刷电机15、毛刷轴12;两个所述行走装置本体1侧壁上均安装有毛刷轴承座3,所述毛刷轴12两端分别安装在两个所述毛刷轴承座3内,使得所述毛刷轴12可在所述毛刷轴承座3 内转动;所述毛刷轴12上安装有毛刷13,所述毛刷电机15的转轴与所述毛刷轴12通过第一驱动链条6传动连接。
55.当所述毛刷电机15正常工作时,所述毛刷电机15的转轴转动,并通过第一驱动链
条6驱动所述毛刷轴12进行转动,使得毛刷轴12 上的毛刷可对光伏组件进行旋转清扫。
56.其中,在所述行走装置本体1的优选实施方式中,如图1、图7 所示,所述行走装置本体1底部安装有若干个纠偏轮14。即可以为一个、两个或多个;优选的,每个所述行走装置16底部安装有三个所述纠偏轮14,所述纠偏轮14用于沿所述光伏组件外侧壁滚动,防止所述清扫机器人偏离所述光伏组件。
57.以上描述仅为本技术的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本技术中所涉及的发明范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述发明构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本技术中公开的(但不限于) 具有类似功能的技术特征进行互相替换而形成的技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1