一种三轴激光清洗机的制作方法
1.本实用新型涉及清洗设备领域,尤其是一种三轴激光清洗机。
背景技术:
2.传统清洗工业有各种各样的清洗方式,多是利用化学药剂和机械方法进行清洗,这种方式存在很大的弊端,比如一些电子零件化学药剂清洗后会造成零部件氧化,通过机械方式清洗容易损伤零件,而激光清洗具有无研磨、非接触、无热效应和适用于各种材质的物体等清洗特点,被认为是最可靠、最有效的解决办法。同时,激光清洗可以解决采用传统清洗方式无法解决的问题,传统的激光清洗机都是半自动,人工手持类居多,这种方式不利于流水线的作业,人工手持也很危险,不利于工业发展。
技术实现要素:
3.为了解决上述问题,本实用新型提出一种三轴激光清洗机。
4.本实用新型通过以下技术方案实现的:
5.本实用新型提出一种三轴激光清洗机,包括x轴传动机构、y轴传动机构、z轴传动机构以及清洗机构,所述y轴传动机构设置在所述x轴传动机构两侧,所述z轴传动机构设置在所述x轴传动机构上,所述清洗机构安装在所述z轴传动机构一侧并与所述z轴传动机构连接。
6.进一步地,所述x轴传动机构包括移动基板、第一滑轨、第一传动杆,所述第一滑轨安装在所述移动基板上,所述第一传动杆上安装有移动块,所述z轴传动机构横跨在所述移动基板上,并安装在所述移动块上。
7.进一步地,所述x轴传动机构包括固定支架、第一驱动装置,所述第一传动杆的一端套设有第一同步轮,所述第一驱动装置通过所述固定支架固定在所述移动基板一侧,所述第一驱动装置上套设有第一同步带,所述第一驱动装置驱动所述第一同步带转动,进而带动所述第一同步轮转动,所述第一同步轮转动驱动所述第一传动杆转动,以驱动所述z轴传动机构在所述移动基板上移动。
8.进一步地,所述z轴传动机构包括安装架、移动架、第二传动杆、第二驱动装置,所述x 轴传动机构包括多个第一滑块,所述安装架通过所述第一滑块安装到所述第一滑轨上,所述移动架在所述安装架上滑动,所述第二驱动装置与所述第二传动杆活动连接,所述第二驱动装置与所述第二传动杆均安装在所述移动架上,所述清洗机构与所述移动架连接。
9.所述第二驱动装置驱动所述第二传动杆升降,进而驱动所述移动架升降,以使所述清洗机构被所述移动架带动升降。
10.进一步地,所述安装架包括底板、立架、第二滑轨,所述z轴传动机构包括多个第二滑块,所述第一滑块安装在所述底板下,所述立架与所述底板固定连接,所述第二滑轨安装在所述立架上,所述移动架通过所述第二滑块与所述第二滑轨滑动连接,以使所述移动架
能够相对于所述立架滑动升降。
11.进一步地,所述清洗机构包括固定座、倒角结构、振镜,所述固定座与所述移动架相连接,所述倒角结构安装在所述固定座底部,所述振镜与所述倒角结构固定连接。
12.进一步地,所述三轴激光清洗机包括测距机构,所述测距机构安装在所述安装架下,所述清洗机构还包括传感器、定位夹和定位杆,所述定位杆一端与所述安装架卡接,另一端与所述定位夹连接,所述定位夹上安装有所述传感器。
13.进一步地,所述y轴传动机构包括第三传动杆、第三驱动装置,所述第三驱动装置与所述第三传动杆相连接,以驱动所述第三传动杆转动。
14.进一步地,所述y轴传动机构还包括限位块、第三滑轨、第三滑块,所述限位块通过所述第三滑块与所述第三滑轨相连接,且所述限位块套设在所述第三传动杆上。
15.进一步地,所述三轴激光清洗机还包括拍摄装置,所述拍摄装置安装在所述安装架下方。
16.本实用新型的有益效果:本实用新型的三轴激光清洗机,包括x轴传动机构、y轴传动机构、z轴传动机构以及清洗机构,所述y轴传动机构设置在所述x轴传动机构两侧,所述z 轴传动机构设置在所述x轴传动机构上,所述清洗机构安装在所述z轴传动机构一侧并与所述z轴传动机构连接;所述三轴激光清洗机采用三轴联动方式带动清洗机构去运动清洗,其中所述x轴传动机构通过2个所述y轴传动机构进行,采用双驱动的驱动方式进行驱动,加工精度高。
附图说明
17.图1为所述三轴激光清洗机的立体结构示意图;
18.图2为所述三轴激光清洗机的分解结构示意图;
19.图3为所述z轴传动机构、所述清洗机构和测距机构的立体结构示意图;
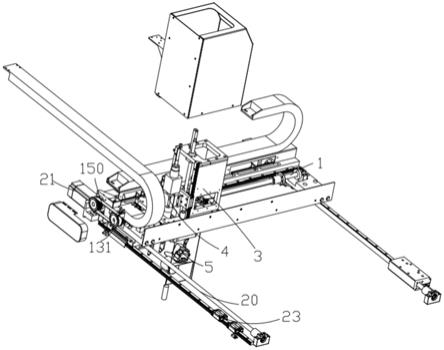
20.图4为所述x轴传动机构的立体结构示意图。
具体实施方式
21.为了更加清楚、完整的说明本实用新型的技术方案,下面结合附图对本实用新型作进一步说明。
22.请参考图1—图4,本实用新型提出一种三轴激光清洗机,包括x轴传动机构1、y轴传动机构2、z轴传动机构3以及清洗机构4,所述y轴传动机构2设置在所述x轴传动机构1 两侧,所述z轴传动机构3设置在所述x轴传动机构1上,所述清洗机构4安装在所述z轴传动机构3一侧并与所述z轴传动机构3连接。
23.在本实施例中,所述三轴激光清洗机设置有2个y轴传动机构2。
24.在本实施例中,所述三轴激光清洗机采用三轴联动方式带动清洗机构4去运动清洗。
25.其中所述x轴传动机构1通过2个所述y轴传动机构2进行,采用双驱动的驱动方式进行驱动,加工精度高。
26.进一步地,所述x轴传动机构1包括移动基板11、第一滑轨12、第一传动杆13,所述第一滑轨12安装在所述移动基板11上,所述第一传动杆13上安装有移动块,所述z轴传动机
构3横跨在所述移动基板11上,并安装在所述移动块上。
27.进一步地,所述x轴传动机构1包括固定支架14、第一驱动装置15,所述第一传动杆13 的一端套设有第一同步轮131,所述第一驱动装置15通过所述固定支架14固定在所述移动基板11一侧,所述第一驱动装置15上套设有第一同步轮131150,所述第一驱动装置15驱动所述第一同步轮131150转动,进而带动所述第一同步轮131转动,所述第一同步轮131转动驱动所述第一传动杆13转动,以驱动所述z轴传动机构3在所述移动基板11上移动。
28.在本实施例中,四个所述第一滑块10卡接在所述第一滑轨12上,所述第一传动杆13两侧固定安装在所述移动基板11上方,所述第一传动杆13的一端套设有第一同步轮131,所述第一驱动装置15通过所述固定支架14固定在所述移动基板11一侧,所述第一驱动装置 15上的同步轮与所述第一传动杆13的所述第一同步轮131相平行,并通过第一同步带150 相连接。
29.进一步地,所述z轴传动机构3包括安装架30、移动架31、第二传动杆32、第二驱动装置33,所述x轴传动机构1包括多个第一滑块10,所述安装架30通过所述第一滑块10安装到所述第一滑轨12上,所述移动架31在所述安装架30上滑动,所述第二驱动装置33与所述第二传动杆32活动连接,所述第二驱动装置33与所述第二传动杆32均安装在所述移动架 31上,所述清洗机构4与所述移动架31连接。
30.在本实施例中,所述z轴传动机构3的安装架30底部固定安装所述移动块上,所述安装架30可以安装外部吸尘机构:所述安装架30底部安装一个用来固定吸尘嘴的固定支架14,吸尘嘴固定在固定支架14上,吸尘嘴尾部连接有一条吸管,吸管另一侧连接有吸尘箱,吸嘴是跟随清洗机构4移动。
31.所述第二驱动装置33驱动所述第二传动杆32升降,进而驱动所述移动架31升降,以使所述清洗机构4被所述移动架31带动升降。
32.进一步地,所述安装架30包括底板300、立架301、第二滑轨302,所述z轴传动机构3 包括多个第二滑块304,所述第一滑块10安装在所述底板300下,所述立架301与所述底板 300固定连接,所述第二滑轨302安装在所述立架301上,所述移动架31通过所述第二滑块 304与所述第二滑轨302滑动连接,以使所述移动架31能够相对于所述立架301滑动升降。
33.进一步地,所述清洗机构4包括固定座40、倒角结构41、振镜42,所述固定座40与所述移动架31相连接,所述倒角结构41安装在所述固定座40底部,所述振镜42与所述倒角结构41固定连接。
34.进一步地,所述三轴激光清洗机包括测距机构5,所述测距机构5安装在所述安装架30 下,所述清洗机构4还包括传感器、定位夹和定位杆,所述定位杆一端与所述安装架30卡接,另一端与所述定位夹连接,所述定位夹上安装有所述传感器。
35.所述测距机构5包括驱动电机53、活动块54、连接板55,所述测距机构5原理是通过驱动电机53旋转进而带动两个同步轮旋转,通过丝杆传动原理带动其上的活动块54与连接板 55进行升降运动,所述传感器为测距仪,在本实施例中,所述清洗机构4与所述z轴传动机构3安装在一起,所述清洗机构4底部与所述测距仪之间构成角度。
36.进一步地,所述y轴传动机构2包括第三传动杆20、第三驱动装置21,所述第三驱动装置21与所述第三传动杆20相连接,以驱动所述第三传动杆20转动。
37.进一步地,所述y轴传动机构2还包括限位块22、第三滑轨23、第三滑块34,所述限
位块22通过所述第三滑块34与所述第三滑轨23相连接,且所述限位块22套设在所述第三传动杆20上。
38.所述第三传动杆20的一端通过联轴器与所述第三驱动装置21相连接,所述第三滑轨23 固定安装在机罩内部的框架,所述第三滑块34卡接在所述第三滑轨23上方,所述第三滑轨 23与所述第三传动杆20之间是平行设置,所述第三滑块34的顶部与所述移动基板11相连接。
39.进一步地,所述三轴激光清洗机还包括拍摄装置6,所述拍摄装置6安装在所述安装架 30下方。
40.所述三轴激光清洗机外部还设置有保护罩,保护罩底部有用来安装流道的方孔,产品从底部流道流入。
41.所述三轴激光清洗机的清洗机构4通过x轴传动机构1、y轴传动机构2、z轴传动机构3 这三轴进行移动清洗,进而使得外部设备的吸嘴能够跟随清洗机构4进行移动吸附。
42.所述三轴激光清洗机采用三轴联动方式带动清洗机构4去运动清洗,其中所述x轴传动机构1通过2个所述y轴传动机构2进行,采用双驱动的驱动方式进行驱动,加工精度高。
43.当然,本实用新型还可有其它多种实施方式,基于本实施方式,本领域的普通技术人员在没有做出任何创造性劳动的前提下所获得其他实施方式,都属于本实用新型所保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1