一种自超声波清洗槽的制作方法
1.本实用新型涉及超声波清洗技术领域,特别是一种自超声波清洗槽。
背景技术:
2.超声波连续清洗设备由于生产线结构复杂,造价成本太高;
3.如国家专利公开号为cn201161243的一种气缸式超声波清洗机,包括一清洗槽(3);其特征在于,还包括:一安装于所述清洗槽(3)底部的气缸(6);安装于所述气缸(6)的活塞上端的工件支架(7);一装有超声波发生器(2)和plc自动控制器的控制柜(1);所述超声波发生器(2) 的超声波振盒(4)放置于所述清洗槽(3)内底部;所述清洗槽(1)通过外接电缆(5)与所述控制柜(1)内装有的完成清洗工作的plc 自动控制器电连接。所述的超声波发生器(2) 的数量为1
‑
8个;其工作频率≥20khz,功率≥300w。所述气缸(6)的数量 为3
‑
8个;
4.上述的超声波清洗机,具有如下缺陷;
5.1、清洗时需要将通过若干个气缸同时工作,而若干个气缸的动力输出端上除了工件支架外并无其他对工件支架进行加固的结构,且工件位于工件支架的顶部内侧,很难保证工件在被清洗期间由于工件的上下移动而使得工件支架不产生晃动;
6.2、每次清洗时均需要将工件吊装在工件支架上,清洗后需要将工件吊装离工件支架,清洗效率低,工作流水线需要进一步优化。
7.针对上述缺陷,提出一种也是借助于气缸和超声波清洗方式的、清洗时更稳定,具有简单上料下料流水线的自超声波清洗槽。
技术实现要素:
8.本实用新型要解决的技术问题是针对现有技术的不足,提供了一种也是借助于气缸和超声波清洗方式的、清洗时更稳定,具有简单上料下料流水线的自超声波清洗槽。
9.本实用新型要解决的技术问题是通过以下技术方案来实现的,包括,
10.由型材搭建的龙门架;
11.在龙门架的底面中部上固定安装有超声波清洗槽,在超声波清洗槽内安装有超声波发生器;
12.固定安装有龙门架前部顶面和后部顶面上的辅助辊道;
13.安装在龙门架中部上的、位于超声波清洗槽上方的提升机构,其包括固定安装在龙门架顶部上的气缸,气缸的动力输出端贯穿龙门架顶部且其端部固定安装有支撑杆,支撑杆的下方设有升降辊道,在支撑杆的底面和升降辊道的两侧固定安装有用于提高升降辊道升降的稳定性的三脚架。
14.本实用新型要解决的技术问题还可以通过以下技术方案来实现的,以上所述的一种自超声波清洗槽,在支撑杆的两侧上还固定安装有滑块,位于滑块旁侧的龙门架内壁上安装有用于对滑块的移动进行导向所设的滑轨。
15.本实用新型要解决的技术问题还可以通过以下技术方案来实现的,以上所述的一种自超声波清洗槽,所述的气缸位于龙门架顶部的中部上。
16.本实用新型要解决的技术问题还可以通过以下技术方案来实现的,以上所述的一种自超声波清洗槽,气缸的动力输出端处于完全收缩状态下时,所述的升降辊道和辅助辊道的顶面处于平行状态。
17.本实用新型要解决的技术问题还可以通过以下技术方案来实现的,以上所述的一种自超声波清洗槽,所述的超声波清洗槽内壁的宽度大于升降辊道的宽度。
18.与现有技术相比,本实用新型的有益技术效果是:
19.(1)通过辅助辊道和升降辊道的使用使得待清洗工件更容易被移动、也即是说由于辅助辊道和升降辊道上的工件容易被拖动而可以在辅助辊道上放置多个待清洗工件并形成简易的清洗流水线,人工拖动升降辊道上的待清洗工件,再推动升降辊道后方辅助辊道上的待清洗工件即可使得位于辅助辊道上的待清洗工件被推动至升降辊道上,而无需进行其他输送设备进行操作,清洗效率高;
20.(2)升降轨道和支撑杆之间安装有三脚架,三脚架的使用使得升降辊道在进行使用时更稳定,配合设置在龙门架侧面上的滑轨和安装在支撑杆上的滑块使得升降辊道在上下升降时能够更稳定,其结构设计合理,更耐用。
附图说明
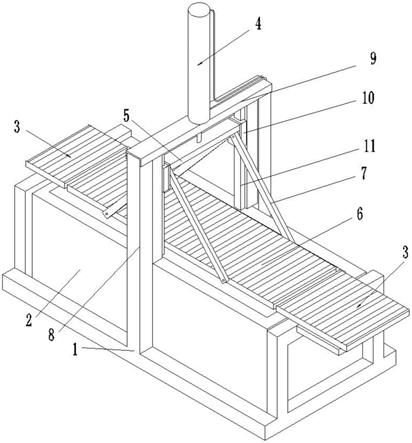
21.图1为本实用新型的结构示意图。
具体实施方式
22.以下参照附图,进一步描述本发明的具体技术方案,以便于本领域的技术人员进一步地理解本发明,而不构成对其权利的限制。
23.实施例1,参照图1,一种自超声波清洗槽,包括,
24.由型材搭建的龙门架1;
25.在龙门架1的底面中部上固定安装有超声波清洗槽2,在超声波清洗槽2内安装有超声波发生器;
26.固定安装有龙门架1前部顶面和后部顶面上的辅助辊道3;
27.安装在龙门架1中部上的、位于超声波清洗槽2上方的提升机构,其包括固定安装在龙门架1顶部上的气缸4,气缸4的动力输出端贯穿龙门架1顶部且其端部固定安装有支撑杆5,支撑杆5的下方设有升降辊道6,在支撑杆5的底面和升降辊道6的两侧固定安装有用于提高升降辊道6升降的稳定性的三脚架7。龙门架1采用现有技术中的龙门架1,其底部由型材搭建,其底部中部上具有竖向支撑梁8,竖向支撑梁8的顶部具有横向支撑梁9,横向支撑梁9的中部具有用于通过气缸4的动力输出端所设的孔隙;超声波清洗槽2的横截面呈矩形状设置;超声波发生器为现有技术根据需求可自行购置故此处不再赘述超声波发生器的型号及其使用原理;辅助辊道3和升降辊道6为具有若干个可转动的辊体结构,例如中部贯通设置的长方体架体结构,长方体架体的内壁上转动安装有若干可转动的辊体;气缸4为现有技术根据需求可自行购置;支撑杆5的横截面呈矩形状设置;三脚架7可为中部贯通的三角形板状结构。
28.实施例2,实施例1所述的一种自超声波清洗槽,在支撑杆5的两侧上还固定安装有滑块10,位于滑块10旁侧的龙门架1内壁上安装有用于对滑块10的移动进行导向所设的滑轨11。滑块10的横截面呈矩形状设置;滑轨11的横截面呈矩形状设置。
29.实施例3,实施例2所述的一种自超声波清洗槽,所述的气缸4位于龙门架1顶部的中部上。
30.实施例4,实施例3所述的一种自超声波清洗槽,气缸4的动力输出端处于完全收缩状态下时,所述的升降辊道6和辅助辊道3的顶面处于平行状态。
31.实施例5,实施例4所述的一种自超声波清洗槽,所述的超声波清洗槽2内壁的宽度大于升降辊道6的宽度。
32.使用时,将待清洗的工件放在辅助辊道3上,辅助辊道3的长度根据需求可自行加长,由于辅助辊道3上具有若干可转动的辊体,使用时仅需要将待清洗的工件推至升降辊道6上即可,将清洗液例如水灌入超声波清洗槽2内,通过外部电源或设备启动气缸4工作,气缸4的动力输出端带动升降辊道6上的待清洗工件沿着滑轨11的设置方向向下移动至超声波清洗槽2中,清洗一段时间后,例如15min,再次驱动气缸4的动力输出端收缩,使得升降辊道6移动至于辅助辊道3水平,此时再次推动待清洗工件,使得位于辅助辊道3上的工件将升降辊道6上的工件推至升降辊道6后方的辅助辊道3上即可,气缸4循环工作即可,气缸4可采用现有技术中的plc控制器进行驱动,其控制方法为现有技术故此处不再赘述其具体控制方法及原理。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1