一种清理风道机器人的制作方法
一种清理风道机器人
1.技术领域
2.本发明属于风道清理设备技术领域, 具体涉及一种清理风道机器人。
背景技术:
3.纺织厂细纱风道内积花清扫复杂,需要职工登高作业,用毛刷从风道口内伸入进行清扫,清扫大约12米左右后需要换另外一个风道口继续清扫,4人清扫一个车间10根风道大约需要6天,并且存在巨大的安全隐患。
4.申请号cn201910699436.7的发明专利公开了“空调风道结构、空调器及空调风道清洁方法”,该发明提供的空调风道结构、空调器及空调风道清洁方法,通过在风道本体上设置换热管道,且换热管道与冷媒管连通,在空调运行时,冷媒管中的介质可流过风道本体,从而可对风道本体进行升温或降温,通过先将空调以制冷模式运行,在风道本体内表面形成凝霜,然后再切换空调以制热模式运行,使凝霜融化流出,可通过空调的自运行实现对风道的自动清洁,可免去人为清理,减少人为清理风道花费的时间及人力,且避免了清理风道对用户或者空调造成的损伤。
5.但是上述发明的空调风道清洁方法只适合对风道内的灰尘清理,不适合清理其他杂物,比如纺织厂细纱风道内的积花,细小的纺织纤维遇水则贴在风道表面,通过上述发明的方法无法彻底将风道清理干净。
技术实现要素:
6.本发明针对现有技术中风道清理主要依靠人工登高作业存在安全隐患、效率低的问题,提供了一种清理风道机器人。
7.为了达到上述目的,本发明采用的技术方案为:一种清理风道机器人,包括遥控车、板毛刷和遥控发射器,所述遥控车包括车体、车轮、遥控接收器、天线、驱动装置和传动装置;所述车体为封闭结构,所述遥控接收器安装在车体内,所述天线与遥控接收器通信连接并伸出车体外;所述车轮为一对后轮和一对前轮,且分别安装于车体左右两侧;所述车体上表面前端和后端分别固定连接有安装板,所述安装板长度方向平行于车体宽度方向,所述安装板的长度大于车体左右两侧车轮的间距,所述安装板长度两端均安装有侧轮且两端的侧轮到车体宽度中心的距离相等,所述侧轮的轴线垂直于安装板上表面; 所述遥控发射器和遥控接收器无线通信连接;所述驱动装置与遥控接收器通过信号线通信连接;所述板毛刷安装在安装板远离车体侧,所述板毛刷下端接触风道,所述板毛刷的长度大于车体左右两侧车轮的间距且小于安装板的长度。
8.作为优选,所述驱动装置包括电池组和两个电机,所述电池组安装在车体内,两个所述电机分别与电池组电性连接,两个所述电机分别与遥控接收器通过信号线通信连接。
9.作为优选,所述传动装置安装在电机和后轮之间,且两个所述电机分别驱动一对
后轮的一个轮子。
10.作为优选,所述板毛刷安装在靠近前轮的安装板远离车体侧。
11.作为优选,所述清理风道机器人还包括监控装置,所述监控装置包括无线监控摄像头和照明灯管,所述照明灯管水平安装在靠近前轮的安装板上表面且照明方向向前;所述无线监控摄像头安装在照明灯管后方,且所述无线监控摄像头的高度大于照明灯管的高度;所述无线监控摄像头和照明灯管分别与电池组电性连接。
12.作为优选,所述无线监控摄像头输出端与外部监控设备无线通信连接;所述照明灯管与遥控接收器通过信号线通信连接。
13.作为优选,所述清理风道机器人还包括监控装置还包括安装在车体底部的磁铁,所述车体为铁质材料。
14.基于清理风道机器人的一种风道清理方法包括以下步骤:步骤一 在风道的内放置一台清理风道机器人,操作人员定期或不定期利用遥控发射器打开照明灯管,然后在外部监控设备上查看无线监控摄像头拍摄的风道内的情况;步骤二 当需要对风道进行清理时,将风道远离清理风道机器人一端的风口与吸尘设备通过吸尘管连接;操作人员利用遥控发射器控制遥控车向吸尘设备方向移动,遥控车前方的板毛刷将风道内的杂物扫至与吸尘设备相连的风口,杂物被吸尘设备吸走;步骤三 如果车体底部安装有磁铁,此时的车体为铁质材料,车体底部的磁铁利用磁性吸附风道内可能的铁质杂物;步骤四 清理完成后,清理风道机器人退回远离吸尘设备端,拆走与风口连接的吸尘管。
15.与现有技术相比,本发明的优点和积极效果在于:(1)本发明提供的清理风道机器人设有板毛刷,不但可以对风道的灰尘进行清扫,还可以将其他固体杂物清扫至风口由吸尘设备吸走,可以将风道清理干净,对不同工作环境的适应性强;(2)操作人员可以利用无线监控摄像头监控风道内的清洁程度,并在风道清理过程中实现可视化操作;(3)操作人员可以遥控清理风道机器人在风道内作业,操作简单,不需人工对风道进行清扫,降低了劳动强度和避免了登高作业带来的安全风险;(4)清理风道机器人可以直行和转向,不但可以清理风道直线段还可以清理弯道段。
附图说明
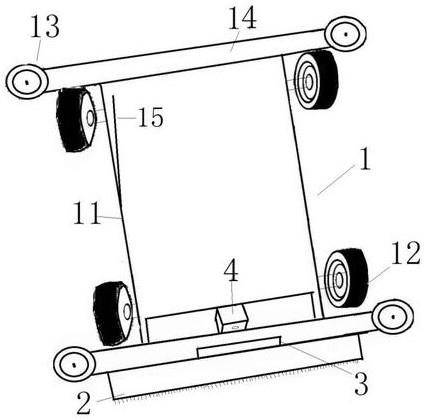
16.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,图1为清理风道机器人示意图;图2 为清理风道机器人侧视图;图3为清理风道机器人中遥控接收器、电池与电机连接示意图。
17.1—遥控车,11—车体,12—车轮,13—侧轮,14—安装板,15—天线;2—板毛刷,3—照明灯管,4—无线监控摄像头,5—磁铁。
具体实施方式
18.为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和实施例对本发明做进一步说明。
19.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用不同于在此描述的其他方式来实施,因此,本发明并不限于下面公开说明书的具体实施例的限制。
20.实施例1下面结合附图1
‑
3对实施例1中的一种清理风道机器人进行说明,如图1、2所示,一种清理风道机器人,包括遥控车1、板毛刷2和遥控发射器(发射无线电信号)。
21.如图1、2所示,遥控车1包括车体11、车轮12、遥控接收器、天线15、驱动装置和传动装置。
22.如图1、2所示,车体11为封闭结构(pp材质或abs塑料或铁质材料),遥控接收器安装在车体11内,天线15与遥控接收器通信连接并伸出车体11外;车轮12为一对后轮和一对前轮,且分别安装于车体11左右两侧;车体11上表面前端和后端分别固定连接有安装板14,安装板14长度方向平行于车体11宽度方向,安装板14的长度大于车体11左右两侧车轮12的间距,安装板14长度两端均安装有侧轮13且两端的侧轮13到车体11宽度中心的距离相等,侧轮13的轴线垂直于安装板14上表面。
23.安装板14长度加上一个侧轮13直径 略小于风道相对的侧壁之间的宽度。侧轮13的设置,可以避免遥控车1在风道内运动过程中发生卡顿;当遥控车1的车体11靠近风道一侧壁时,由于安装板14的长度大于车体11左右两侧车轮12的间距,所以安装板14靠近风道侧壁的侧轮13与侧壁首先接触并相对转动,这样车轮12、车体11将不会被风道侧壁卡阻。
24.遥控发射器和遥控接收器无线通信连接;驱动装置与遥控接收器通过信号线通信连接。
25.如图1、2所示,板毛刷2安装在安装板14远离车体11侧,板毛刷2下端接触风道,板毛刷2的长度大于车体11左右两侧车轮12的间距且小于安装板14的长度。
26.板毛刷2的这种长度设置已经能够满足大部分风道的清理需求,为了进一步改进(增加对风道边部角落的清理),可以在车体11的上方安装小型吸尘器,而吸尘器的吸尘管分为两个支管,每个支管的开口朝向风道边部角落。
27.驱动装置包括电池组、两个电机,电池组安装在车体11内,两个电机分别与电池组电性连接,两个电机分别与遥控接收器通过信号线通信连接(该部分为现有技术,遥控接收器和电机之间为电调,电调的信号线与遥控接收器连接,电调的输出线与电机连接,如图3所示)。
28.传动装置安装在电机和后轮之间,且两个电机分别驱动一对后轮的一个轮子。上述技术特征采用了遥控玩具汽车转向技术:两个电机分别驱动一对后轮的一个轮子,两个后轮不同的转速会导致遥控车1行进方向发生改变,即通过改变两个后轮的速度和速度比可以实现遥控车1转向。
29.遥控车1可以转向,那么本申请的清理风道机器人不但能够清理风道直线部分,而且可以清理弯道部分。
30.如图1、2所示,板毛刷2安装在靠近前轮的安装板14远离车体11侧。
31.如图1、2所示,清理风道机器人还包括监控装置,监控装置包括无线监控摄像头4和照明灯管3,照明灯管3水平安装在靠近前轮的安装板14上表面且照明方向向前;无线监控摄像头4安装在照明灯管3后方,且无线监控摄像头4的高度大于照明灯管3的高度;无线监控摄像头4和照明灯管3分别与电池组电性连接。
32.无线监控摄像头4输出端与外部监控设备无线通信连接(该部分利用了无线监控摄像头现有技术);照明灯管3与遥控接收器通过信号线通信连接(该部分利用了灯的无线开关现有技术)。
33.基于清理风道机器人的一种风道清理方法,包括以下步骤:步骤一 在风道的内放置一台清理风道机器人,操作人员定期或不定期利用遥控发射器打开照明灯管3,然后在外部监控设备上查看无线监控摄像头4拍摄的风道内的情况;步骤二 当需要对风道进行清理时,将风道远离清理风道机器人一端的风口与吸尘设备通过吸尘管连接;操作人员利用遥控发射器控制遥控车1向吸尘设备方向移动,遥控车1前方的板毛刷2将风道内的杂物扫至与吸尘设备相连的风口,杂物被吸尘设备吸走;步骤三 清理完成后,清理风道机器人退回远离吸尘设备端,拆走与风口连接的吸尘管。
34.实施例2本实施例与实施例1的区别是:清理风道机器人还包括安装在车体11底部的磁铁5,车体11为铁质材料。将车体11限定为铁质材料,是为了防止磁铁5的磁场对车体11内部的电路元件(如电感线圈、遥控开关等)造成影响,车体11为铁质封闭结构可为里面的电路元件提供磁屏蔽环境。
35.磁铁5的静磁场对无线电信号无影响。
36.基于清理风道机器人的一种风道清理方法,包括以下步骤:步骤一 在风道的内放置一台清理风道机器人,操作人员定期或不定期利用遥控发射器打开照明灯管3,然后在外部监控设备上查看无线监控摄像头4拍摄的风道内的情况;步骤二 当需要对风道进行清理时,将风道远离清理风道机器人一端的风口与吸尘设备通过吸尘管连接;操作人员利用遥控发射器控制遥控车1向吸尘设备方向移动,遥控车1前方的板毛刷2将风道内的杂物扫至与吸尘设备相连的风口,杂物被吸尘设备吸走;步骤三 铁质的车体11底部的磁铁5还会利用磁性吸附风道内可能的铁质杂物;步骤四 清理完成后,清理风道机器人退回远离吸尘设备端,拆走与风口连接的吸尘管。
37.实施例3本实施例与实施例1的区别是:靠近前轮和靠近后轮的安装板14远离车体11侧均安装板毛刷2;遥控车1前后均安装在照明灯管3和无线监控摄像头4。
38.基于清理风道机器人的一种风道清理方法,包括以下步骤:步骤一 在风道的内放置一台清理风道机器人,操作人员定期或不定期利用遥控发射器打开照明灯管3,然后在外部监控设备上查看无线监控摄像头4拍摄的风道内的情况;
步骤二 当需要对风道进行清理时,将风道两端的风口与吸尘设备通过吸尘管连接;操作人员利用遥控发射器控制遥控车1向一端吸尘设备方向移动,遥控车1前端的板毛刷2将风道内的杂物扫至与吸尘设备相连的风口,杂物被吸尘设备吸走;然后操作人员利用遥控发射器控制遥控车1向另一端吸尘设备方向移动,遥控车1后端的板毛刷2将风道内的杂物扫至与吸尘设备相连的风口,杂物被吸尘设备吸走;步骤三 清理完成后,拆走与风口连接的吸尘管。
39.以上所述,仅是本发明的较佳实施例而已,并非是对本发明作其他形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例应用于其他领域,但是凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化,仍属于本发明技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1