一种基于智能控制的垃圾分类处理系统
一种基于智能控制的垃圾分类处理系统
【技术领域】
1.本发明涉及垃圾分类技术领域,尤其涉及一种基于智能控制的垃圾分类处理系统。
背景技术:
2.环境与发展问题是全球普遍关注的一个问题,随着我国经济的持续增长,人民生活水平的日益提高,在城市化进程不断加快的同时,也面临着环境问题的恶化,其中也包括垃圾分类与处理的难题。若有大量的垃圾堆积成山,用传统的人工进行垃圾分类与处理会消耗大量人力物力财力,并且存在着一定的安全风险。
技术实现要素:
3.本发明公开了一种基于智能控制的垃圾分类处理系统,可以自动实现垃圾的分类处理。
4.为实现上述目的,本发明的技术方案为:
5.一种基于智能控制的垃圾分类处理系统,包括垃圾分类组件及垃圾处理组件,所述垃圾分类组件包括:
6.传送带,所述传送带的两侧设置有挡板,所述挡板与所述传送带配合围成流道,垃圾在所述流道内传送,所述挡板上设有与所述流道连通的垃圾出口;
7.引导板,所述引导板的设置位置与所述垃圾出口相对应,所述引导板与所述挡板通过销轴铰接,且所述引导板绕所述销轴旋转以打开或封闭所述垃圾出口;
8.摄像头,悬置于所述传送带上方,用于对所述流道内的垃圾进行拍照;
9.处理装置,所述摄像头将拍摄的垃圾照片传送给所述处理装置,所述处理装置对垃圾照片进行分析处理,得到垃圾分类结果,并根据所述垃圾分类结果控制所述引导板旋转。
10.优选的,所述垃圾出口的数量为多个,每个所述垃圾出口的下方设置有垃圾桶。
11.优选的,所述垃圾出口包括可回收垃圾出口及不可回收垃圾出口,所述流道的末端还设有其他垃圾出口,所述可回收垃圾出口下方设置有可回收垃圾桶,所述不可回收垃圾出口的下方设置有不可回收垃圾桶,所述其他垃圾出口的下方设置有其他垃圾桶。
12.优选的,所述传送带包括沿传送方向依次设置的一级传送带、二级传送带及三级传送带,所述一级传送带的传送方向与三级传送带的传送方相反,所述二级传送带的传送方向与所述一级传送带的传送方向垂直。
13.优选的,所述二级传送带的首端向末端方向倾斜向上延伸,所述一级传送带的末端上方悬置有铅帘。
14.优选的,所述二级传送带的传送速度小于所述三级传送带的传送速度。
15.优选的,所述垃圾处理组件包括垃圾粉碎装置,所述垃圾粉碎装置设置于所述不可回收垃圾桶内,所述垃圾粉碎装置包括旋转轴承、安装于所述旋转轴承上的旋转轴及固
定于所述旋转轴上的刀片,所述旋转轴与外界的驱动装置连接,由所述驱动装置驱动旋转,带动所述刀片旋转粉碎所述不可回收垃圾桶内的不可回收垃圾。
16.优选的,所述垃圾处理组件还包括垃圾压缩装置,所述垃圾压缩装置包括底部支架、顶部支架、侧方支架、液压驱动装置及压板,所述底部支架与所述顶部支架平行间隔,所述侧方支架连接所述底部支架和所述顶部支架,使用时,将所述可回收垃圾桶置于所述底部支架上,所述压板悬置于所述可回收垃圾桶上方,所述液压驱动装置驱动所述压板向下运动挤压所述可回收垃圾桶内的可回收垃圾。
17.优选的,所述垃圾压缩装置还包括滑轨,所述滑轨的末端与所述底部支架连接,所述可回收垃圾桶放置于所述滑轨的首端上方,所述滑轨驱动所述可回收垃圾桶移动至所述底部支架上。
18.优选的,所述处理装置为树莓派。
19.与相关技术相比,本发明提供的基于智能控制的垃圾分类处理系统中,通过程序控制能实现垃圾的自动分类,并且经过垃圾粉碎和垃圾压缩的处理后,能更加方便后续的垃圾存储和运输过程,可扩展性强,性价比高,便于推广普及和实际应用。
【附图说明】
20.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图,其中:
21.图1为本发明提供的基于智能控制的垃圾分类处理系统的俯视图;
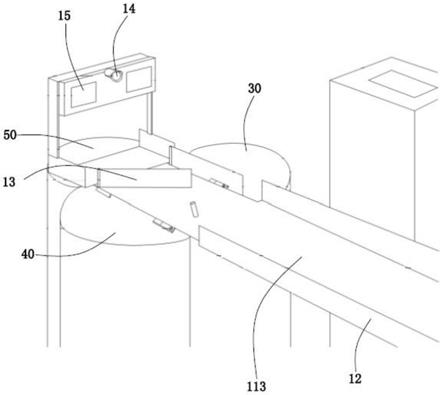
22.图2为图1所示的基于智能控制的垃圾分类处理系统部分结构的立体图;
23.图3为垃圾处理组件的结构示意图。
【具体实施方式】
24.为了使本技术领域的人员更好地理解本发明实施例中的技术方案,并使本发明的上述目的、特征和优点能够更加明显易懂,下面对本发明的具体实施方式作进一步的说明。
25.请结合参阅图1
‑
3,本发明提供一种基于智能控制的垃圾分类处理系统100,包括垃圾分类组件10及垃圾处理组件20。
26.所述垃圾分类组件10包括传送带11、挡板12、引导板13、摄像头14及处理装置15。
27.所述传送带11包括沿传送方向依次设置的一级传送带111、二级传送带112及三级传送带113,所述一级传送带111和所述三级传送带113的传送方向相反,所述二级传送带112的传送方向与所述一级传送带111的传送方向垂直。所述传送带11整体为u形,利用所述二级传送带112进行传送方向的改变,可以缩短所述传送带11沿单一方向的排布距离,同时可以延长垃圾在所述传送带11上的传送时间,使垃圾可以沿所述传送带分散的分布。可以理解的是,为了保证顺利传送,所述一级传送带111末端需要位于所述二级传送带112首端的上方,所述二级传送带112的末端需要位于所述三级传送带113首端的上方。
28.优选的,所述二级传送带112的传送速度小于所述三级传送带113的传送速度,所述二级传送带112的首端向末端方向倾斜向上延伸,使得二级传送带112的末端高于首端,
垃圾能够借助自身重力以及与所述第二传送带112之间摩擦力在所述二级传送带112上减速,从而使垃圾的分布更加分散,便于后续的垃圾分类。
29.进一步的,所述一级传送带111的末端上方悬置有铅帘,所述铅帘的上方固定,下方活动,所述铅帘具有一定的重量,当垃圾从所述一级传送带111的末端通过时,会挤压所述铅帘的活动端,所述铅帘的活动端给垃圾方向的作用力,用于将垃圾摊平,通过调节所述铅帘与所述第二传送带111末端的间距,可以改变摊平后垃圾的高度。
30.所述挡板12设置于所述传送带11的两侧,所述挡板12与所述传送带11配合围成流道,垃圾在所述流道内传送,可以避免从所述传送带11的侧边掉落。
31.进一步的,所述挡板12上设有与所述流道连通的垃圾出口,垃圾从所述垃圾出口排出。优选的,所述垃圾出口设置于所述第三传送带113两侧的挡板12上,所述垃圾出口的数量为多个,所述垃圾出口的下方设置有垃圾桶。具体的,在本实施方式中,所述垃圾出口包括可回收垃圾出口及不可回收垃圾出口,所述可回收垃圾出口及不可回收垃圾出口设置于所述第三传送带113的相对两侧。
32.所述流道的末端还设有其他垃圾出口,所述可回收垃圾出口下方设置有可回收垃圾桶30,所述不可回收垃圾出口的下方设置有不可回收垃圾桶40,所述其他垃圾出口的下方设置有其他垃圾桶50。
33.所述引导板13的设置位置与所述垃圾出口的位置相对应,所述引导板13与所述挡板12通过销轴铰接,且所述引导板13绕所述销轴旋转以打开或封闭所述垃圾出口。具体的,垃圾不需要从所述垃圾出口排出时,所述引导板13与所述挡板12齐平,并完全封挡所述垃圾出口,垃圾从所述其他垃圾出口排出;当垃圾需要从所述垃圾出口排出时,所述引导板13在驱动装置的驱动下朝向所述流道内旋转,此时所述垃圾出口打开,垃圾撞击所述引导板13后沿所述引导板13移动,然后从所述垃圾出口排出,所述引导板13起到垃圾的导向作用。优选的,所述引导板13的旋转方向为70
°
。
34.在本实施方式中,所述引导板13的数量也为两个,其中一个所述引导板13与所述可回收垃圾出口相对应,另一个所述引导板13与所述不可回收垃圾出口相对应。所述引导板13的旋转可以由舵机驱动运动,其采用本领域的常规结构即可,本实施方式对此不做赘述。
35.所述摄像头14悬置于所述传送带11上方,用于对所述流道内的垃圾进行拍照。具体的,所述摄像头14悬置于所述三级传送带113的末端上方。所述摄像头14将拍摄的垃圾照片传送给所述处理装置15,所述处理装置15对垃圾照片进行分析处理,得到垃圾分类结果,并根据所述垃圾分类结果控制所述引导板13旋转。例如,当所述处理装置15识别到垃圾为可回收垃圾时,所述处理装置15向所述可回收垃圾出口处引导板13的控制装置发送启动信号,使该引导板13对应旋转,所述可回收垃圾出口打开,可回收垃圾从所述可回收垃圾出口排出,进入所述可回收垃圾桶30。优选的,所述处理装置15为树莓派。
36.所述摄像头14拍照垃圾的照片后转换为电信号输送给所述处理装置15的中控芯片中,通过内置的垃圾分类算法对垃圾的照片进行识别,识别的结果分为可回收垃圾、不可回收垃圾及其他垃圾。
37.所述垃圾处理组件20包括垃圾粉碎装置21及垃圾压缩装置22。
38.所述垃圾粉碎装置21设置于所述不可回收垃圾桶40内,所述垃圾粉碎装置21包括
旋转轴承211、安装于所述旋转轴承211上的旋转轴212及固定于所述旋转轴212上的刀片213,所述旋转轴212与外界的驱动装置连接,由所述驱动装置驱动旋转,带动所述刀片213旋转粉碎所述不可回收垃圾桶40内的不可回收垃圾。所述垃圾粉碎装置21可将不可回收垃圾粉碎成糊状,一般垃圾的体积将减少30%,有些材料甚至达到50%,极大程度地压缩了垃圾体积,对垃圾起到了压缩增容的效果,此外,垃圾经过粉碎处理过后,也能减少垃圾清运次数,可节省垃圾运输成本和填埋费用。
39.所述垃圾压缩装置22包括底部支架221、顶部支架222、侧方支架223、液压驱动装置224及压板225,所述底部支架221与所述顶部支架222平行间隔,所述侧方支架223连接所述底部支架221和所述顶部支架222,使用时,将所述可回收垃圾桶30放置于所述底部支架221上,所述压板225悬置于所述可回收垃圾桶30上方,所述液压驱动装置224驱动所述压板225向下运动挤压所述可回收垃圾桶30内的可回收垃圾。所述垃圾压缩装置22可以用于压缩粮食、豆类、蔬菜瓜果等种类厨余垃圾,压缩后可以用于土壤堆肥;也可用于压缩节能灯、废旧电池、荧光灯、废旧药品等各种废弃物的有害垃圾,防止这些垃圾投放不当对环境造成直接或者潜在的危害。
40.所述垃圾压缩装置22还包括滑轨226,所述滑轨226的末端与所述底部支架221连接,所述可回收垃圾桶30放置于所述滑轨226的首端上方,所述滑轨226驱动所述可回收垃圾桶30移动至所述底部支架221上。
41.基于智能控制的垃圾分类处理系统100的使用过程为:
42.当垃圾进入所述三级传送带113进行垃圾分类时,首先由所述摄像头14进行识别,所述摄像头14首先获取一张图片并保存在存储卡中,接着由所述处理装置15读取存储卡中的信息,使用垃圾分类算法识别垃圾的类别,接着使用串口通信将垃圾信息传送给stm32主控芯片。stm32芯片根据垃圾信息进行相应控制,使所述引导板13旋转,垃圾将经引导板13导向后通过相应垃圾出口进入相应的垃圾桶中。
43.如果该垃圾被判断为类似于矿泉水瓶,饮料瓶等需要压缩的可回收垃圾时,则开启左舵机使左侧引导板13向右旋转70度,垃圾进入可回收垃圾桶30中,垃圾进入可回收垃圾桶30后,如需压缩,将开启位于可回收垃圾桶30的滑轨226的驱动装置,使可回收垃圾桶30能够滑动到压板225下方,开启所述液压驱动装置224驱动所述压板225向下挤压,进行垃圾压缩。如果该垃圾被判断为树叶,树枝等需要进行粉碎的不可回收垃圾时,将开启右舵机使右侧向左旋转70度,垃圾进入垃圾桶后,如需进行粉碎处理则开启圾粉碎装置21的驱动装置,驱动旋转轴212旋转,带动刀片213旋转进行垃圾搅碎处理。
44.与相关技术相比,本发明提供的基于智能控制的垃圾分类处理系统中,通过程序控制能实现垃圾的自动分类,并且经过垃圾粉碎和垃圾压缩的处理后,能更加方便后续的垃圾存储和运输过程,可扩展性强,性价比高,便于推广普及和实际应用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1