一种生物池流场精确控制装置及其控制方法
1.本发明涉及一种生物池流场精确控制装置及其控制方法,属于污水处理技术领域。
背景技术:
2.生物池是利用大量有益微生物的新陈代谢功能,使污水中呈溶解和胶体状态的有机污染物被降解并转化为无害物质,使污水得以净化。影响生物池工艺高效运行的因素很多,其中污水平均流速是其重要指标之一,为了保证活性污泥处于悬浮状态,而不产生污泥沉淀现象,保证污水处理的正常运行,污水处理规范规定生物池中的污水平均流速不宜小于0.25m/s,工程实践中一般规定污水流速为0.25m/s~0.35m/s。在生物池中,实现污水不产生沉淀现象的动力主要来源于潜水搅拌机(推流器),潜水搅拌机水平安装在池中,旋转的叶轮产生的轴向推力推动池中污水向前流动。
3.1.由于潜水搅拌机的轴向推力与其功率、叶轮直径和型式、叶轮转速等密切相关,污水流动的速度在轴向逐渐减小。因此,生物池中需要多台潜水搅拌机来维持污水的流速,以保证活性污泥处于悬浮状态。
4.2.潜水搅拌机的平面流场不但包含轴线的速度,而且包含搅拌机轴线两侧的速度分布,其宽度方向的速度分布也是不均匀的,距离搅拌机轴线越远,其污水流速越低,影响活性污泥的状态,在速度较小的区域容易产生污泥沉淀现象,不能保证活性污泥处于悬浮状态。
5.3.潜水搅拌机的流场由于受到池壁边界效应或各搅拌机流场的相互干扰,在生物池的平面内,其流场发生变化,有些区域流速较小,容易产生污泥沉淀现象,同样不能保证活性污泥处于悬浮状态。
技术实现要素:
6.本发明所要解决的技术问题是,克服现有技术的缺点,提供一种生物池流场精确控制装置及其控制方法,对生物池流场实行精确控制,即对生物池平面的流速实现动态精确控制,并且扩大平面搅拌范围,减小搅拌死区,以保证在生物池的不同位置的活性污泥较好的处于悬浮状态,不会产生污泥沉淀现象。
7.为了解决以上技术问题,本发明提供一种生物池流场精确控制装置,设置在生物池内,包括潜水搅拌机、轴向流速调节器、导杆、速度传感器及控制系统,控制系统设置在生物池上,导杆竖直设置于生物池内,潜水搅拌机滑动设置在导杆上,潜水搅拌机的一侧设有变频控制板,生物池内设有轴向流速调节器及速度传感器,轴向流速调节器立式设置于潜水搅拌机上,轴向流速调节器位于潜水搅拌机的正前方,其中:
8.轴向流速调节器包括第一轴承体、第二轴承体、翼型、角度调节器及定位销,翼型上设有转动孔,第一轴承体上设有角度调节器,翼型的一端设有第二轴承体,另一端设有第一轴承体,角度调节器与第一轴承体连接,翼型与角度调节器通过定位销固定连接;
9.速度传感器、变频控制板与控制系统相连接。
10.本发明进一步限定的技术方案是:
11.进一步的,前述生物池流场精确控制装置中,潜水搅拌机的数量至少为一台。
12.前述生物池流场精确控制装置中,潜水搅拌机轴线安装高度即潜水搅拌机到生物池底的距离是500
‑
1500mm。
13.前述生物池流场精确控制装置中,轴向流速调节器距离潜水搅拌机叶轮前端300
‑
600mm。
14.前述生物池流场精确控制装置中,速度传感器包括沉水设置在生物池中的第一速度传感器和第二速度传感器,第一速度传感器及第二速度传感器对称位于潜水搅拌机轴线的两侧,并位于潜水搅拌机轴线所在的水平面上。
15.前述生物池流场精确控制装置中,速度传感器的数量为2n,第一速度传感器和第二速度传感器的数量分别各n个,n为潜水搅拌机的数量。
16.前述生物池流场精确控制装置中,翼型由压力面和吸力面包络而成,翼型上的转动孔为翼型厚度方向的穿透孔。
17.本发明还涉及一种基于上述装置的生物池流场精确控制方法,在生物池内安装好生物池流场精确控制装置,生物池在运行过程中,当潜水搅拌机水平方向的角度调整固定好,生物池的流场稳定后,安装在潜水搅拌机两侧液面下的各第一速度传感器和各第二速度传感器将所测数据传递给控制系统,操作人员根据所测数据调节潜水搅拌机频率或轴向流速调节器以对流场进行控制:
18.模式一:
19.当轴线所在的水平面上潜水搅拌机某一侧的第一速度传感器和另一侧的第二速度传感器显示的流速同时偏大或偏小,则控制系统根据所测速度数值确定潜水搅拌机的运行频率,控制潜水搅拌机的电机运行频率,以控制流体的流速,使流体的流速在设定的范围内;
20.模式二:
21.当轴线所在的水平面上潜水搅拌机某一侧的第一速度传感器显示流速偏大,另一侧的第二速度传感器显示流速偏小,则根据控制系统所测速度参数大小对轴向流速调节器的安放角进行不断调整,直至第一速度传感器和第二速度传感器传递给控制系统的速度数据在设定范围内,则轴向流速调节器的角度调节成功,其中:
22.轴向流速调节器安放角的调整具体为:
23.将潜水搅拌顺着导杆向上提起,轴向流速调节器随潜水搅拌机一同提上池边,将翼型顺时针方向转动一定的角度,然后将翼型用定位销固定在角度调节器上,再次放入池中运行,待生物池的流场稳定后,重新根据速度传感器传递的速度参数判断轴向流速调节器的调节是否成功,如果达不到设计要求,则循环以上调整操作直至调节成功;
24.模式三:
25.当轴线所在的水平面上潜水搅拌机某一侧的第一速度传感器显示流速偏小,另一侧的第二速度传感器显示流速偏大,则控制系统根据所测速度参数大小对轴向流速调节器的安放角进行不断调整,直至第一速度传感器和第二速度传感器传递给控制系统的速度数据在设定范围内,则轴向流速调节器的角度调节成功,其中:
26.轴向流速调节器安放角的调整具体为:
27.将潜水搅拌机顺着导杆向上提起,轴向流速调节器随潜水搅拌机一同提上池边,将翼型逆时针方向转动一定的角度,将翼型用定位销固定在角度调节器上,再次放入池中运行,待生物池的流场稳定后,重新根据速度传感器传递的速度参数判断轴向流速调节器的调节是否成功,如果达不到设计要求,则循环以上调整操作直至调节成功。
28.前述生物池流场精确控制方法中,该控制方法运行一段时间或污水处理工艺参数改变时,根据各位置的第一速度传感器和第二速度传感器所测的数据,对生物池的流场重新进行评定,当潜水搅拌机某侧的流速变化较大,偏离工况范围较大时重新按上述方法重新进行调整,改变各潜水搅拌机的搅拌和污泥悬浮效果,如此反复不断精确控制流场,使整个生物池保持一定的速度梯度。
29.本发明的有益效果是:
30.与现有技术相比,本发明的技术方案具有以下有益效果,提供一种生物池流场的精确控制装置及其控制方法,安装在生物池中不同位置的速度传感器测出的速度参数传递给控制系统,根据潜水搅拌机前方的各点的不同位置速度流场,确定轴向流速调节器的弦线安放角的大小或搅拌机的运行频率,增强或减弱不同位置的搅拌效果。当生物池污水处理工艺参数改变时,重新调节轴向流速调节器的弦线安放角,改变各搅拌机在轴向及两侧方向的搅拌和污泥悬浮效果,如此反复不断精确控制流场,使整个生物池在轴向及两侧的平面内速度流场满足设计运行要求,对流场进行精确调节,使池底不会产生污泥沉淀现象,以及在液面下不会产生污泥浓度很低的不均匀等现象,从而保证不同位置的活性污泥始终处于悬浮状态,保证生物池工艺的正常运行。
附图说明
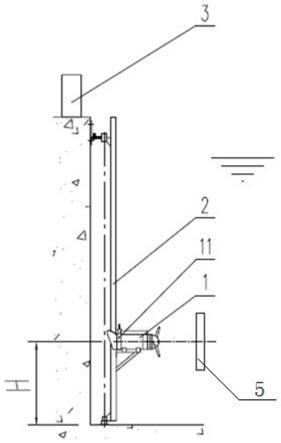
31.图1为本发明的实施例生物池流场精确控制装置在安装在生物池时的截面示意图:
32.图2为图1中轴向流速调节器的结构示意图;
33.图3为本发明实施例生物池流场精确控制方法使用时翼型顺时针流态摆动示意图;
34.图4是本发明实施例生物池流场精确控制方法使用时翼型逆时针流态摆动示意图;
35.图中:1
‑
潜水搅拌机,11
‑
变频控制板,2
‑
导杆,3
‑
控制系统,5
‑
轴向流速调节器,51
‑
定位销,52
‑
角度调节器,53
‑
第一轴承体,54
‑
翼型,541
‑
压力面,542
‑
吸力面,543
‑
转动孔,55
‑
第二轴承体。
具体实施方式
36.实施例1
37.本实施例提供的一种生物池流场精确控制装置,结构如图1所示,用于对生物池平面的流速实现动态精确控制,设置在生物池内,包括潜水搅拌机1、轴向流速调节器5、导杆2、速度传感器及控制系统3,控制系统3采用市面现有的,控制系统3设置在生物池上,导杆2竖直设置于生物池内,潜水搅拌机1通过现有技术滑动设置在导杆2上,(搅拌机在停机状态
下可以顺着导轨上下移动,工作时是固定不动),潜水搅拌机1的一侧设有变频控制板11,变频控制板11设置在潜水搅拌机1的接线盒内,生物池内设有轴向流速调节器5及速度传感器,轴向流速调节器5立式设置于潜水搅拌机1上,轴向流速调节器5通过现有技术设置在潜水搅拌机1,如通过包箍和杆件等设置在潜水搅拌机上,轴向流速调节器5位于潜水搅拌机1的正前方,其中:
38.如图2所示,轴向流速调节器5包括第一轴承体53、第二轴承体55、翼型54、角度调节器52及定位销51,翼型54上设有转动孔543,第一轴承体53上设有角度调节器52,翼型54的一端设有第二轴承体55,另一端设有第一轴承体53,角度调节器52与第一轴承体53连接,翼型54与角度调节器52通过定位销51固定连接;
39.第一速度传感器、第二速度传感器、变频控制板11与控制系统3相连接,第一速度传感器、第二速度传感器传递信号给控制系统3,可以根据各点速度大小调整轴向流速调节器5的安放角度,调整潜水搅拌机1的搅拌范围,或传递信号给变频控制板11,根据需要确定潜水搅拌机1的运行频率,调整搅拌机的运行速度,从而调整搅拌机的轴向推力,改变生物池的污水流速,改善生物池的流态。
40.在本实施例中,潜水搅拌机1的数量至少为一台。
41.在本实施例中,潜水搅拌机1轴线安装高度即潜水搅拌机到生物池底的距离是500
‑
1500mm。在本实施例中,轴向流速调节器5距离潜水搅拌机1叶轮前端300
‑
600mm。
42.在本实施例中,速度传感器包括沉水设置在生物池中的第一速度传感器和第二速度传感器,第一速度传感器及第二速度传感器对称位于潜水搅拌机1轴线的两侧,并位于潜水搅拌机1轴线所在的水平面上。
43.在本实施例中,速度传感器的数量为2n,第一速度传感器和第二速度传感器的数量分别各n个,n为潜水搅拌机1的数量。
44.在本实施例中,根据需要可在生物池内设有污泥浓度传感器,污泥浓度传感器沉水设置在生物池中,并位于潜水搅拌机两侧,污泥浓度传感器数量与速度传感器数量一样,并与控制系统连接。
45.如图3和4所示,翼型54由压力面541和吸力面542包络而成,翼型54上的转动孔543为翼型54厚度方向的穿透孔,流体作用在受压面541上,形成较大围绕转动孔543的旋转力f
压
,f
压
对于转动孔543形成较大的力矩m
压
,受压面541将此侧的流体向外侧扩散,使该侧的搅拌范围得以扩大,使平面流场范围更宽阔,保证平面内污泥的悬浮效果,使工艺可靠运行;
46.图3中翼型54的压力面541受到的顺时针方向的力矩m
压
大于吸力面542受到的逆时针方向的力矩m
吸
,即m
压
>m
吸
,翼型54绕转动孔543顺时针方向转动,随着翼型54的不断转动,吸力面侧的搅拌范围和混合搅拌效果也不断得到加强。在转动过程中,原来的受压面541变为吸力面542,原来的吸力面542变为受压面541。作用在新的受压面541的力f
压
不断增大(力矩m
压
同步增大),而作用在新的吸力面542的力f
吸
不断减小(m
吸
同步减小),当力矩m
压
=m
吸
时,翼型54在惯性力的作用下继续顺时针方向转动,直至顺时针转动到极限位置。在此极限位置(如图4所示),新的受压面的的作用力f
压
达到最大(m
压
同步),新的吸力面受到的力f
吸
达到最小(m
吸
同步)。图4中翼型54的压力面541受到的逆时针方向的力矩m
压
大于吸力面542受到的顺时针方向的力矩m
吸
,即m
压
>m
吸
,翼型54绕转动孔543逆时针方向转动,随着翼型54的不断转动,新的吸力面侧的搅拌范围和混合搅拌效果不断得到加强。在转动过程中,原来的受
压面541恢复为受压面541,原来的吸力面542恢复为吸力面542。作用在受压面541的力f
压
不断增大(力矩m
压
同步增大),而作用在吸力面542的力f
吸
不断减小(m
吸
同步减小),当力矩m
压
=m
吸
时,翼型54在惯性力的作用下继续逆时针方向转动,直至逆时针转动到极限位置。在此极限位置(如图3所示),受压面的的作用力f
压
达到最大(m
压
同步),吸力面受到的力f
吸
达到最小(m
吸
同步)。
47.在本实施例中,角度调节器52用于调节翼型54的弦线安放角β,弦线安放角β越大,其受压面受到来流的直接冲击,其压力f
压
越大,翼型54受到流体形成的力矩m
压
就越大;翼型54的吸力面受到的压力f
吸
较小,翼型54受到流体形成的力矩m
吸
就越小,m
压
与m
吸
的差值就越大,翼型54摆动幅度就越大,即潜水搅拌机在平面内的搅拌范围就越大,该范围内的流场得到加强,提高了搅拌与均匀混合和污泥悬浮效果。
48.在本实施例中,角度调节器52用于调节翼型54的弦线安放角β,弦线安放角β越小,其受压面受到来流的直接冲击,其压力f
压
越小,翼型54受到流体形成的力矩m
压
就越小;翼型54的吸力面受到的压力f
吸
较大,翼型54受到流体形成的力矩m
吸
就越大,m
压
与m
吸
的差值就越小,翼型54摆动幅度就越小,即潜水搅拌机在平面内的搅拌范围就越小,该范围内的流场得到减弱,降低了搅拌与均匀混合和污泥悬浮效果。
49.在本实施例中,弦线安放角β的调整通过角度调节器52进行调整,角度调节器52固定设置在第一轴承体53的上端,角度调节器52的上端部含有定位孔,翼型54上端部设置有若干调节孔,顺时针或逆时针转动翼型54一定的角度后,其上的调节孔随之转动,将最终确定的翼型54上的调节孔与角度调节器52上的定位孔对准,用固定销51将翼型54固定在第一轴承体53上的角度调节器52上。
50.在本实施例中,翼型54逆时针微微调整一定角度后(根据需要调节),受压面541受到流体的压力f
压
加大,而吸力面542受到流体的吸力f
吸
微微减小,翼型54受到流体形成的力矩m
压
就越大,而翼型54的吸力面受到的压力f
吸
较小,翼型54受到流体形成的力矩m
吸
就越小,m
压
与m
吸
的差值就越大,翼型54摆动幅度就越大,即潜水搅拌机在平面内的搅拌范围就越大,该范围内的流场得到加强,提高了搅拌与均匀混合和污泥悬浮效果。
51.在本实施例中,翼型54顺时针微微转动一定角度后,受压面541受到流体的压力f
压
减小,而吸力面542受到流体的吸力f
吸
微微增加,翼型54受到流体形成的力矩m
压
就越小,而翼型54的吸力面受到的压力f
吸
较大,翼型54受到流体形成的力矩m
吸
就越大,m
压
与m
吸
的差值就越小,翼型54摆动幅度就越小,即潜水搅拌机在平面内的搅拌范围就越小,该范围内的流场适当减弱,对于原先搅拌效果或污泥悬浮过大的流场紧张适当缓解。
52.采用上述装置来实现对生物池流场内的流速进行动态精确控制,一种生物池流场精确控制方法,具体为:在生物池内安装好生物池流场精确控制装置,生物池在运行过程中,当潜水搅拌机水平方向的角度调整固定好,生物池的流场稳定后,安装在潜水搅拌机两侧液面下的各第一速度传感器和各第二速度传感器将所测数据传递给控制系统,操作人员根据所测数据调节潜水搅拌机频率或轴向流速调节器以对流场进行控制:
53.工艺不同,流体的流速不同,本实施例按工程实践中一般规定控制污水流速为0.25m/s~0.35m/s,即以下内容中提及的流速的设定范围为0.25m/s~0.35m/s;
54.模式一:
55.当轴线所在的水平面上潜水搅拌机某一侧的第一速度传感器和另一侧的第二速
度传感器显示的流速同时偏大或偏小,则控制系统根据所测速度数值确定潜水搅拌机的运行频率,控制潜水搅拌机的电机运行频率,以控制流体的流速,使流体的流速在设定的范围内;
56.模式二:
57.当轴线所在的水平面上潜水搅拌机某一侧的第一速度传感器显示流速偏大,另一侧的第二速度传感器显示流速偏小,则根据控制系统所测速度参数大小对轴向流速调节器的安放角进行不断调整,直至第一速度传感器和第二速度传感器传递给控制系统的速度数据在设定范围内,则轴向流速调节器的角度调节成功,其中:
58.轴向流速调节器安放角的调整具体为:
59.将潜水搅拌顺着导杆向上提起,轴向流速调节器随潜水搅拌机一同提上池边,将翼型顺时针方向转动一定的角度,然后将翼型54用定位销固定在角度调节器52上,再次放入池中运行,待生物池的流场稳定后,重新根据速度传感器传递的速度参数判断轴向流速调节器的调节是否成功,如果第一速度传感器和第二速度传感器传递给控制系统3的速度数据在设计范围内,则轴向流速调节器5的速度调节成功,如果控制系统3接收到的第一速度传感器流速仍然偏大,而第二速度传感器显示速度数据仍然偏小,则继续顺时针调节翼型54的角度,直至流场速度精确控制在设计范围内;
60.模式三:
61.当轴线所在的水平面上潜水搅拌机某一侧的第一速度传感器显示流速偏小,另一侧的第二速度传感器显示流速偏大,则控制系统根据所测速度参数大小对轴向流速调节器的安放角进行不断调整,直至第一速度传感器和第二速度传感器传递给控制系统的速度数据在设定范围内,则轴向流速调节器的角度调节成功,其中:
62.轴向流速调节器安放角的调整具体为:
63.将潜水搅拌机顺着导杆向上提起,轴向流速调节器随潜水搅拌机一同提上池边,将翼型逆时针方向转动一定的角度,将翼型用定位销固定在角度调节器上,再次放入池中运行,待生物池的流场稳定后,重新根据速度传感器传递的速度参数判断轴向流速调节器的调节是否成功,如果第一速度传感器和第二速度传感器传递给控制系统的速度数据在设计范围内,则轴向流速调节器的速度调节成功,如果控制系统3接收到的第一速度传感器仍然流速偏小,而第二速度传感器流速仍然偏大,则继续逆时针调节翼型54的角度,直至流场速度精确控制在设计范围内。
64.该控制方法根据实际情况运行一段时间或污水处理工艺参数改变时,根据各位置的第一速度传感器和第二速度传感器所测的数据,或根据设置各点的污泥浓度传感器判断活性污泥的悬浮状态(浓度),对生物池的流场重新进行评定,当潜水搅拌机某侧的流速变化较大,偏离工况(污水流速为0.25m/s~0.35m/s)范围较大,设定低于下限和高于上限10%时,重新按上述方法重新进行调整,改变各潜水搅拌机的搅拌和污泥悬浮效果,如此反复不断精确控制流场,使整个生物池保持一定的速度梯度,确保无死角,保证活性污泥处于悬浮状态,保证生物池工艺的正常运行。
65.除上述实施例外,本发明还可以有其他实施方式。凡采用等同替换或等效变换形成的技术方案,均落在本发明要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1