一种垃圾分类智能机器人及其使用方法与流程
1.本发明涉及机器人技术领域,具体为一种垃圾分类智能机器人及其使用方法。
背景技术:
2.垃圾分类指按一定规定或标准将垃圾分类储存、投放和搬运,从而转变成公共资源的一系列活动的总称。垃圾分类可提高垃圾的资源价值和经济价值,大致根据垃圾的成分构成、产生量,结合本地垃圾的资源利用和处理方式来进行分类的。分类的目的就是为了将废弃物分流处理,利用现有生产制造能力,回收利用回收品,包括物质利用和能量利用,填埋处置暂时无法利用的无用垃圾,由于垃圾分类处于起步阶段,很多民众并不能很好的对垃圾进行分类,对于什么垃圾归为什么垃圾仍存在盲区,因此一般情况下生活垃圾的分类由垃圾处理厂进行回收和处理。
3.现有技术中,如中国专利号为:cn 111674776 b的“一种垃圾分类用智能机器人装置”,包括载料箱、设于所述载料箱侧壁上的第一连接板及设于所述第一连接板上的顶板,所述载料箱内设有多个垃圾桶,所述第一连接板上设有智能语音模块,所述第一连接板上设有多个与所述多个垃圾桶相对应的指示灯,所述顶板上设有第一空腔,所述第一连接板上设有与所述第一空腔相通的第二空腔,所述载料箱底部设有第三空腔,所述第二空腔底部设有与所述第三空腔相通的第一通腔,所述第一通腔为两组,分别设于所述第二空腔两侧,所述第三空腔内设有活动块,所述活动块上设有刮板。
4.该装置还存在以下缺点:垃圾回收厂在对垃圾进行分类时,一般采用人工进行垃圾分类,特别现在要求干、湿垃圾分类之后,需要大量的人力对垃圾进行分类,耗时耗力,导致垃圾分类的效率低下,目前也在使用智能机器人进行垃圾捡拾,但现有的智能机器人仅能够对特定物体进行抓取,并不能对不同的垃圾进行自动识别和投放,给使用者造成了极大的不便。
5.所以我们提出了一种垃圾分类智能机器人及其使用方法,以便于解决上述中提出的问题。
技术实现要素:
6.本发明的目的在于提供一种垃圾分类智能机器人及其使用方法,以解决上述背景技术提出的现有的智能机器人仅能够对特定物体进行抓取,并不能对不同的垃圾进行自动识别和投放,给使用者造成了极大的不便等问题。
7.为实现上述目的,本发明提供如下技术方案:一种垃圾分类智能机器人,包括机器本体、控制机构和抓取机构,所述机器本体的顶部与控制机构的顶部活动安装,所述控制机构的一端与抓取机构的一端活动安装,所述控制机构包括智能控制器、吸附板、活动环连接杆和含水率检测仪,所述智能控制器的一端与活动环的内壁固定连接,所述活动环的外壁活动连接有红外传感器,所述智能控制器的底部与吸附板的顶部固定连接,所述智能控制器的底部与含水率检测仪的顶部固定安装,所述吸附板的底部均匀固定连接有若干个磁吸
块,所述抓取机构包括第一面板、第二面板、固定杆和伸缩杆,所述第二面板的底端均匀固定连接有三个转动杆,所述转动杆的外壁转动连接有抓取组件,所述抓取组件包括第一抓取板、第二抓取板、活动连接件和抓取杆件,所述第一抓取板的一端固定连接有套环,所述第一抓取板的另一端与活动连接件的两端固定安装,所述活动连接件的外壁与第二抓取板的一端转动连接,所述第一抓取板的底部与抓取杆件的顶部固定安装,所述第二抓取板的顶部两侧对称固定连接有挡板,所述挡板的内侧均匀活动连接有若干个滚动球,所述第二抓取板的底部均匀开设有若干个防滑槽。
8.优选的,所述套环的内壁与转动杆的外壁活动连接,所述第二面板的底部固定连接有吸附环,所述第二面板的底部均匀固定连接有三个负压件。
9.优选的,所述第一面板的底部与第二面板的顶部固定连接,所述第一面板的顶部与伸缩杆的底部活动连接,所述伸缩杆的顶部与固定杆的一端活动安装。
10.优选的,所述智能控制器的一端设置有开关,所述智能控制器的另一端与固定杆的一端固定连接,所述智能控制器的顶部固定连接有固定块,所述固定块的顶部与连接杆的底部固定安装。
11.优选的,所述机器本体包括控制底座、支撑柱、第一臂杆、第二臂杆和承载板,所述控制底座的一侧固定连接有操作屏,所述控制底座的两端对称活动安装有活动轮,所述活动轮的外壁活动连接有转动带。
12.优选的,所述控制底座的顶部活动安装有转盘,所述转盘的顶部与承载板的底部固定连接,所述承载板的顶部与支撑柱的底部固定连接,所述支撑柱的顶部固定连接有调节组件。
13.优选的,所述调节组件的顶部与第一臂杆的一端转动连接,所述第一臂杆的另一端固定连接有第一转动杆,所述第一转动杆的两端与第二臂杆的一端转动连接,所述第二臂杆的另一端固定连接有第二转动杆。
14.优选的,所述第二转动杆的外壁活动连接有安装件,所述安装件的底部与连接杆的顶部固定安装。
15.一种垃圾分类智能机器人的使用方法,包括以下步骤:s1、首先进行数据采集、标定和增强,获得一个满足项目需求的数据集。
16.s2、根据数据集对机器人模型进行训练。
17.s3、使用时,控制底座可以控制第一臂杆、第二臂杆和智能控制器,红外传感器对垃圾进行定位和识别,含水率检测仪对垃圾的干湿种类进行分辨。
18.s4、确定垃圾种类后,智能控制器控制抓取机构对垃圾进行抓取并将垃圾投放在对应的垃圾箱内。
19.与现有技术相比,本发明的有益效果是:1、通过设置控制机构,控制底座和智能控制器无线连接,红外传感器根据不同垃圾的温度辐射不同波长的红外线,同时红外传感器和智能控制器的数据集进行比较对垃圾进行判断和定位,含水率检测仪可以检测出垃圾所含水率,含水率检测仪和红外传感器的结合,使该机器人具备垃圾识别的功能,若该垃圾为金属材质,智能控制器控制底部磁吸块将垃圾吸住再投放在对应的垃圾箱内;2、通过设置抓取机构,智能控制器可以控制抓取机构,垃圾为大块物体时,第一抓
取板和负压件将垃圾抓取,负压件可以使垃圾内侧处于负压状态,使垃圾不易掉落,将该垃圾投放在对应的垃圾箱内,若该垃圾为稀释状不易抓取的物体,第二抓取板可以将垃圾铲起后移动到垃圾箱内,同时滚动球不断晃动使第二抓取板产生震动,将垃圾抖落干净,该垃圾分类机器人通过红外传感器、含水率检测仪和智能控制器,使机器人可以自动对垃圾进行物体定位和识别,同时控制机构和抓取机构可以实现对物体的自动抓取和投放动作,极大地促进了垃圾分类的全面推广,减轻了垃圾分类过程中劳动者的劳动力,也降低了能源的损耗,从而践行了环保的理念。
附图说明
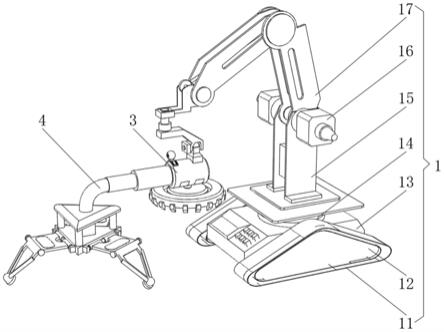
20.图1为本发明一种垃圾分类智能机器人及其使用方法的立体图;图2为本发明一种垃圾分类智能机器人及其使用方法的结构示意图;图3为本发明一种垃圾分类智能机器人及其使用方法的仰视结构立体图;图4为本发明一种垃圾分类智能机器人及其使用方法的控制机构的结构立体图;图5为本发明一种垃圾分类智能机器人及其使用方法的控制机构的仰视结构示意图;图6为本发明一种垃圾分类智能机器人及其使用方法的分类机构的结构示意图;图7为本发明一种垃圾分类智能机器人及其使用方法的分类机构的仰视结构示意图;图8为本发明一种垃圾分类智能机器人及其使用方法的第一抓取板的结构示意图。
21.图中:1、机器本体;3、控制机构;4、抓取机构;11、转动带;12、活动轮;13、控制底座;14、转盘;15、支撑柱;16、调节组件;17、第一臂杆;18、第一转动杆;19、第二臂杆;20、第二转动杆;21、安装件;22、操作屏;23、承载板;31、连接杆;32、固定块;33、红外传感器;34、活动环;35、智能控制器;36、吸附板;37、磁吸块;38、含水率检测仪;39、开关;41、固定杆;42、伸缩杆;43、第一面板;44、第二面板;45、转动杆;46、抓取组件;47、负压件;48、吸附环;461、第二抓取板;462、活动连接件;463、抓取杆件;464、第一抓取板;465、套环;466、挡板;467、滚动球;468、防滑槽。
具体实施方式
22.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施条例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
23.参照图1
‑
8所示:一种垃圾分类智能机器人,包括机器本体1、控制机构3和抓取机构4,机器本体1的顶部与控制机构3的顶部活动安装,控制机构3的一端与抓取机构4的一端活动安装,控制机构3和机器本体1结合,通过根据垃圾的位置和种类进行运作,控制机构3包括智能控制器35、吸附板36、活动环34连接杆31和含水率检测仪38,智能控制器35的一端与活动环34的内壁固定连接,活动环34的外壁活动连接有红外传感器33,红外传感器33可
以在活动环34的外壁活动,便于对周围经过的垃圾进行识别和定位,含水率检测仪38可以检测出垃圾所含水率,含水率检测仪38和红外传感器33的结合,可以对经过的干湿垃圾进行自动识别,智能控制器35的底部与吸附板36的顶部固定连接,智能控制器35的底部与含水率检测仪38的顶部固定安装,吸附板36的底部均匀固定连接有若干个磁吸块37,当垃圾为金属材质时,磁吸块37可以轻松地将垃圾吸住,抓取机构4包括第一面板43、第二面板44、固定杆41和伸缩杆42,固定杆41可以控制伸缩杆42的位置,第二面板44的底端均匀固定连接有三个转动杆45,转动杆45的外壁转动连接有抓取组件46,抓取组件46包括第一抓取板464、第二抓取板461、活动连接件462和抓取杆件463,第一抓取板464的一端固定连接有套环465,抓取组件46可以围绕第二面板44转动,第一抓取板464的另一端与活动连接件462的两端固定安装,活动连接件462的外壁与第二抓取板461的一端转动连接,第一抓取板464的底部与抓取杆件463的顶部固定安装,第二抓取板461的顶部两侧对称固定连接有挡板466,挡板466的内侧均匀活动连接有若干个滚动球467,当第二抓取板461活动时顶部的滚动球467不断滚动,达到使第二抓取板461振动的目的,可以将垃圾抖落干净,第二抓取板461的底部均匀开设有若干个防滑槽468,防滑槽468起到防滑效果,套环465的内壁与转动杆45的外壁活动连接,第二面板44的底部固定连接有吸附环48,第二面板44的底部均匀固定连接有三个负压件47,负压件47可以使垃圾内侧处于负压状态,使垃圾被抓取杆件463抓取得更加牢固,不易掉落,第一面板43的底部与第二面板44的顶部固定连接,第一面板43的顶部与伸缩杆42的底部活动连接,伸缩杆42的顶部与固定杆41的一端活动安装,智能控制器35的一端设置有开关39,开关39用于开启智能控制器35,智能控制器35的另一端与固定杆41的一端固定连接,智能控制器35的顶部固定连接有固定块32,固定块32的顶部与连接杆31的底部固定安装。
24.根据图1
‑
3所示,机器本体1包括控制底座13、支撑柱15、第一臂杆17、第二臂杆19和承载板23,控制底座13的一侧固定连接有操作屏22,操作屏22可以对控制底座13的各种参数进行调节,控制底座13可以控制顶部转盘14的转动方向,同时可以控制第一臂杆17和第二臂杆19的转动角度,控制底座13的两端对称活动安装有活动轮12,活动轮12的外壁活动连接有转动带11,控制底座13的顶部活动安装有转盘14,转盘14的顶部与承载板23的底部固定连接,承载板23的顶部与支撑柱15的底部固定连接,承载板23起到支撑固定的作用,支撑柱15的顶部固定连接有调节组件16,调节组件16的顶部与第一臂杆17的一端转动连接,第一臂杆17的另一端固定连接有第一转动杆18,通过第一转动杆18可以实现第一臂杆17和第二臂杆19的转动,第一转动杆18的两端与第二臂杆19的一端转动连接,第二臂杆19的另一端固定连接有第二转动杆20,第二转动杆20的外壁活动连接有安装件21,安装件21的底部与连接杆31的顶部固定安装,安装件21用于将机器本体1和控制机构3进行安装固定。
25.一种垃圾分类智能机器人的使用方法,包括以下步骤:步骤一、首先进行数据采集、标定和增强,获得一个满足项目需求的数据集。
26.步骤二、根据数据集对机器人模型进行训练。
27.步骤三、使用时,控制底座13可以控制第一臂杆17、第二臂杆19和智能控制器35,红外传感器33对垃圾进行定位和识别,含水率检测仪38对垃圾的干湿种类进行分辨。
28.步骤四、确定垃圾种类后,智能控制器35控制抓取机构4对垃圾进行抓取并将垃圾
投放在对应的垃圾箱内。
29.本发明中,在该机器人使用之前,首先需要进行数据采集、标定和增强,针对采集好的样本通过图像处理进行裁剪、旋转、放大、缩小以及平移来扩充数据集,从而达到数据增强的目的,获得一个满足项目需求的数据集,其次需要将该数据集输入到该机器人的智能控制器35内,根据数据集对机器人模型进行训练,该训练是基于神经网络来实现的,在所有配置完好的情况下开始训练,待机器人训练完成后,将该机器人放置在垃圾处理的对应场所,通过控制底座13可以控制整个机器本体1的运作,操作屏22方便对该机器本体1的各种参数进行调节,控制底座13和智能控制器35无线连接,当有垃圾运输到控制机构3和抓取机构4的底部时,智能控制器35一端的红外传感器33在活动环34外壁转动,红外传感器33根据不同垃圾的温度辐射不同波长的红外线,同时红外传感器33和智能控制器35的数据集进行比较对垃圾进行判断和定位,吸附板36底部的含水率检测仪38可以检测出垃圾所含水率,含水率检测仪38和红外传感器33的结合,可以对经过的干湿垃圾进行自动识别,识别后将信息传输给智能控制器35,若该垃圾为金属材质,智能控制器35控制底部吸附板36和磁吸块37向下移动,将垃圾吸住再投放在对应的垃圾箱内,同时智能控制器35可以控制抓取机构4,抓取机构4根据垃圾的位置调节伸缩杆42的长度,垃圾为大块物体时,第二抓取板461向上转动,第一抓取板464带动底部抓取杆件463向内侧转动,同时负压件47可以使垃圾内侧处于负压状态,使垃圾被抓取杆件463抓取得更加牢固,不易掉落,控制底座13控制转盘14转动,将该垃圾投放在对应的垃圾箱内,若该垃圾为稀释状不易抓取的物体,第二抓取板461向下转动,将垃圾铲起后移动到垃圾箱内即可,同时第二抓取板461顶部设置有多个滚动球467,滚动球467不断晃动使第二抓取板461产生震动,将垃圾抖落干净,该垃圾分类机器人通过红外传感器33对垃圾进行定位,且通过含水率检测仪38对垃圾的干湿种类进行分辨,智能控制器35控制分类机构4对垃圾进行抓取,使机器人可以自动对需要分类的垃圾进行物体定位和识别,同时控制机构3和抓取机构4可以实现对物体的自动抓取和投放动作,极大地促进了垃圾分类的全面推广,减轻了垃圾分类过程中劳动者的劳动力,也降低了能源的损耗,从而践行了环保的理念。
30.尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1