连续大落差和U型液体管道投产过程中清管器排气方法与流程
连续大落差和u型液体管道投产过程中清管器排气方法
技术领域
1.本发明涉及管道投产领域,具体来讲,涉及一种连续大落差和u型液体管道投产过程中清管器排气方法。
背景技术:
2.管道投产是在正式投入运营之前的重要步骤,在此期间,需要进行管道清洗、设备调试、排气等操作,正是这个步骤保证了管道之后能稳定且安全地投入运营。现今国内外在管道投产方面的方法有若干种,具体方案需要依据管道自身条件和所输送的介质来确定。对于输油管道来说,国内外现主要采用三种投产方案:全线水联运投产方案、部分管段充水投产方案和空管投油投产方案。我国的油气管道横穿东西、纵贯南北,覆盖的地形十分复杂。因此,国内诸多已建成和在建管道是具有连续大落差和u型管段结构的。而对于这一类型的管道来说,常常采用全线水联运投产方案。
3.全线水联运投产,即在管道正式投油前管道全线输水联运,而在连续起伏管道中,由于落差较大,水头经过高点后以不满流的形式继续向下游流动,到管段低点时形成u型液段封闭,最终导致管段积气,形成若干积气段。
4.针对具有连续大落差的管段投产过程中,积气的排气方法一般有两种:(1)直接排气,即在不断投水的过程中,液相不断对管道进行填充,迫使积气往外排出;(2)运移排气,即积气在液流不断冲击下,由于液流的紊流能大于积气段的表面张力能,使得积气破碎成小气泡,并随着水流排出。
5.现有清管器技术应用于在大落差管道的投产过程中的减少油水混油量的领域,也有对于长距离输送管道中清管器运行的优化方法、以及在高压输气管道中研究清管器运行对于弥合水击压力的影响。
6.但对于在具有连续大落差和u型输油管道投产中,气阻较多,且位置难以判定。且地形起伏较大,不同管段的高程和倾角都不一致,且这些管段都是相互连接并互相影响的。投产过程中,具有不同高程的u型管段中上坡段积液之后,会在相应下坡段形成不同大小大背压,上坡段越高,背压越大;而背压的大小会直接影响清管器在该管段中的运移特征,进而影响清管器的排气效果。若将这些具有不同高程、倾角的u型管段连接在一起后,它们之间还会存在着相互影响。所以,对于该领域的清管器排气方法的研究在国内外尚属空白。
技术实现要素:
7.本发明的目的在于解决现有技术存在的上述不足中的至少一项。例如,本发明的目的之一在于提供一种特别适用于连续大落差输油管道的水联运投产过程中的排气方法,以有效地解决连续大落差输油管道的水联运投产过程中,因管内气体、高差起伏等原因导致排水过程中出现的至少一种问题:(1)排水管线大幅震动,甚至摆动等问题;(2)管道实际压力超出理论计算压力的情况,造成管道流量过低,严重时导致水联运无法正常进行的问题;(3)由于气阻的存在而导致的管道破裂,环境污染等事故的问题。
8.为了实现上述目的,本发明提供了一种连续大落差和u型液体管道投产过程中清管器排气方法。
9.所述方法可包括:(1)根据气液界面位置和下游低点的液相积累程度,确定初始流型,根据初始流型,进行清管器排气计算,更新清管器位置和气液界面位置;(2)根据更新结果、以及各流型之间的转变条件,判定流型的转变情况;(3)若流型发生转变,则根据转变后的流型进行清管器排气计算,然后继续更新气液界面位置和清管器位置;若流型未发生转变,则继续根据原流型的计算方法进行计算;重复步骤(2)和(3),直至排气工作结束。
10.进一步地,所述初始流型可包括第一流型、第二流型或第三流型;其中,第一流型可包括:清管器位于基本管段的上坡段,下坡段低点无液体;第二流型可包括:清管器位于基本管段的上坡段,液体在下坡段低点累积但未完全堵住下坡段的气体;第三流型可包括:清管器位于基本管段的上坡段,液体在下坡段低点累积并完全堵住下坡段的气体。
11.进一步地,所述清管器排气计算可包括:判断清管器的运动状态;若清管器为静止状态,则清管器的运动速度为0,计算清管器前后压力;若清管器为非静止状态,则利用假设-检验法迭代计算清管器的速度,然后计算清管器前后压力;进行气液界面追踪和清管器追踪计算。
12.进一步地,在所述初始流型为第一流型或第二流型的情况下,
[0013][0014]
其中,pa为清管器上游界面液体的压力,ρ为投产油品的密度,g为重力加速度,h
p
为清管器的高程,ho为管道起点高程,λ为水力摩阻系数,l
p
为清管器离管道起点的里程,d为清管器处管道内径,v为清管器上游液体流速,α为惯性项修正系数,αgδvδt为惯性项,δt为离散计算时步,δv为计算时步内速度变化,po为出口压力;
[0015][0016]
其中,pb为清管器下游界面液体的压力,ρ'为水的密度,h
l
为气液界面的高度,h
p
为清管器的高度,v
p
为清管器的速度,ν为水的运动粘度,p为气相区的压力,(l
l-l
p
)为气液界面所处位置与清管器所处位置之间的里程。
[0017]
进一步地,在所述初始流型为第三流型的情况下,
[0018][0019]
其中,pa为清管器上游界面液体的压力,ρ为投产油品的密度,g为重力加速度,h
p
为清管器的高程,ho为管道起点高程,λ为水力摩阻系数,l
p
为清管器离管道起点的里程,d为清管器处管道内径,v为清管器上游液体流速,α为惯性项修正系数,αgδvδt为惯性项,δt为离散计算时步,δv为计算时步内速度变化,po为出口压力;
[0020][0021]
其中,pb为清管器下游界面液体的压力,ρ'为水的密度,h
l
为气液界面的高度,h
p
为清管器的高度,(l
高点-l
p
)为所在u型段内的清管器下游最高点位置与清管器所处位置之间的里程,v
p
为清管器的速度,ν为水的运动粘度,p为气相区的压力。
[0022]
进一步地,在所述初始流型为第一流型的情况下,清管器位置和气液界面位置可以由以下公式描述:
[0023]
l
pt+l
=l
pt
+vp
t
*δt,l
gt+1
=l
gt
+vp
t
*δt,
[0024]
其中,l
pt+1
为清管器在t+1时刻的位置,l
pt
为清管器在时刻t的位置,l
gt+1
为气液界面在t+1时刻的位置,l
gt
为气液界面在时刻t的位置,vp
t
为时刻t清管器的速度,
△
t为t+1时刻和t时刻之间的时间差值;
[0025]
在所述初始流型为第二流型的情况下,清管器位置和气液界面位置可以由以下公式描述:
[0026]
l
pt+1
=l
pt
+vp
t
*δt,l
gt+1
=管道低点,
[0027]
在所述初始流型为第二流型的情况下,清管器位置和气液界面位置可以由以下公式描述:
[0028]
l
pt+1
=l
pt
+v
pt
*δt,h
1t+1
=0.5*(h
1t
+h
2t
)-pg/ρg,h
2t+1
=α(h
1t
+h
2t
)-h
1t+1
,
[0029]
其中,l
低点
表示气液界面所在u型段内的最低点位置,h1为下坡段液塞的高度,h2为上坡段液塞的高度;θ2为上坡段倾角,pg为积气段的气体压力。
[0030]
进一步地,在初始流型为第一流型的情况下,所述转变后的流型可以为第二流型;在初始流型为第二流型的情况下,所述转变后的流型可以为第三流型。
[0031]
进一步地,在初始流型为第三流型的情况下,所述转变后的流向可以为第四流型或第六流型;其中,第四流型可包括:清管器位于基本管段的下坡段,液体在下坡段低点累积并完全堵住下坡段的气体;第六流型可包括:清管器位于第一上坡段未翻过第一上坡段高点,液体在第一下坡段低点累积并完全堵住第一下坡段的气体,水头翻过第二上坡段高点,液体在第二下坡段低点累积但未完全堵住第二下坡段的气体,其中,按照上游至下游方向,依次为第一上坡段、第一上坡段高点、第一下坡段、第一下坡段低点、第二上坡段、第二上坡段高点、第二下坡段和第二下坡段低点。
[0032]
进一步地,所述第四流型之后的转变流型为第五流型或第八流型,第五流型之后的转变流型为第一流型,第八流型之后的转变流型为第九流型或第四流型;其中,第五流型可包括:清管器位于基本管段的下坡段,积气段尾部到达管段最低点,尾部的气相以气泡或者小积气段的形式向上坡段运移;第八流型可包括:清管器翻过第一高点并位于第一下坡段,液体在第一下坡段低点累积并完全堵住第一下坡段的气体,水头翻过第二上坡段高点,液体在第二下坡段低点累积但未完全堵住下坡段的气体,其中,按照上游至下游方向,依次为第一上坡段高点、第一下坡段、第一下坡段低点、第二上坡段、第二上坡段高点、第二下坡段和第二下坡段低点;第九流型可包括:清管器翻过第一高点并位于第一下坡段,液体在第一下坡段低点累积并完全堵住第一下坡段的气体,水头翻过第二上坡段高点,液体在第二下坡段低点累积并完全堵住下坡段的气体。
[0033]
进一步地,所述第六流型之后的转变流型可以为第七流型,第七流型之后的转变流型可以为第三流型或第九流型,第九流型之后的转变流型可以为第四流型;其中,第七流型可以包括:清管器位于第一上坡段未翻过第一上坡段高点,液体在第一下坡段低点累积并完全堵住第一下坡段的气体,水头翻过第二上坡段高点,液体在第二下坡段低点累积并
完全堵住第二下坡段的气体,其中,按照上游至下游方向,依次为第一上坡段、第一上坡段高点、第一下坡段、第一下坡段低点、第二上坡段、第二上坡段高点、第二下坡段和第二下坡段低点;第九流型可包括:清管器翻过第一高点并位于第一下坡段,液体在第一下坡段低点累积并完全堵住第一下坡段的气体,水头翻过第二上坡段高点,液体在第二下坡段低点累积并完全堵住下坡段的气体。
[0034]
与现有技术相比,本发明的有益效果包括以下内容中的至少一项:
[0035]
(1)本发明可以有效的避免由于气阻的存在而导致的管道超压、管线摆动、振动,甚至管道破裂,环境污染等事故的发生;
[0036]
(2)本发明可有效节省由于管线停输所带来的时间成本和人力成本,可有效控制由于爆管等事故产生的维修成本,环境治理成本等,由此产生可观的经济效益;
[0037]
(3)可确保在具有连续大落差和u型液体管道的投产更安全和稳定的进行,并且为投产过程中的人员安全,设备安全以及环境安全提供更有力的保障。
附图说明
[0038]
通过下面结合附图进行的描述,本发明的上述和其他目的和/或特点将会变得更加清楚,其中:
[0039]
图1示出了大落差管道投产过程中形成的积气段的示意图;
[0040]
图2示出了本发明的基础流型一的示意图;
[0041]
图3示出了本发明的基础流型二的示意图;
[0042]
图4示出了本发明的基础流型三的示意图;
[0043]
图5示出了本发明的基础流型四的示意图;
[0044]
图6示出了本发明的基础流型五的示意图;
[0045]
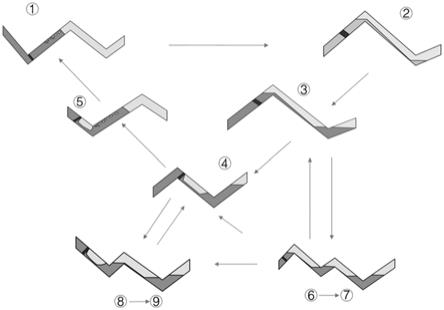
图7示出了本发明的五种基础流型转换关系图;
[0046]
图8示出了本发明的组合流型六、流型七的示意图;
[0047]
图9示出了本发明的组合流型八、流型九的示意图;
[0048]
图10示出了本发明的九种流型转换关系图;
[0049]
图11示出了清管器受力示意图;
[0050]
图12示出了清管器前后分区示意图;
[0051]
图13示出了本发明的基础流型一的计算流程图;
[0052]
图14示出了本发明的基础流型二的计算流程图;
[0053]
图15示出了本发明的基础流型三的计算流程图;
[0054]
图16示出了本发明的基础流型四的计算流程图;
[0055]
图17示出了本发明的基础流型五的计算流程图;
[0056]
图18示出了本发明的组合流型六计算流程图;
[0057]
图19示出了本发明的组合流型七计算流程图;
[0058]
图20示出了本发明的组合流型八计算流程图;
[0059]
图21示出了本发明的组合流型九计算流程图;
[0060]
图22示出了本发明的全流程清管器排气计算方法框图。
具体实施方式
[0061]
在下文中,将结合附图和示例性实施例来详细说明本发明的连续大落差和u型液体管道投产过程中清管器排气方法。
[0062]
需要说明的是,“第一”、“第二”、“第三”、“第四”等仅仅是为了方便描述和便于区分,而不能理解为指示或暗示相对重要性。“上”、“下”、“前”、“后”、“左”、“右”、“高”、“低”仅仅为了便于描述和构成相对的方位或位置关系,而并非指示或暗示所指的部件必须具有该特定方位或位置。
[0063]
在具有连续大落差和u型液体管道的水联运投产过程中,通常有三个基本过程:(1)液流翻越高点后,进入下坡段,液流会以明渠流动方式向低点流去;(2)液流到达低点后,逐渐累积形成液塞,同时下坡段中的积气段也形成了,例如图1所示的积气段示意图;(3)随着液流不断冲入,液塞生长,低点后上坡段液位升高,低点前下坡段背压升高,积气段被压缩。在上坡段液流翻越下一个高点后,返回(1)过程,组成一个“基本过程”,而下坡段和上坡段构成一个“基本管段”,而若干个基本过程循环往复,组成了整个水联运投产过程。
[0064]
在实际投产过程中,绝大部分的“基本管段”是有着不同高程和长度的,并且它们是相互连接,相互影响的。基于此,发明人针对连续大落差管道的水联运投产过程,提出了适用于清管器排气方法的五种基本流型和四种组合流型以及它们之间的转换关系。基于这些流型,本发明提出了相应的清管器排气计算方法。需要说明的是,本发明认为,随着清管器的运移,积气会随之移动,即类似于清管器“推”着积气走的过程。所以,本发明中对于清管器位置的追踪计算,即等同于对清管器排气的计算,故在后文中,仅对清管器位置的追踪计算进行说明(即可作为清管器排气计算的说明)。
[0065]
对于不同流型下清管器排气问题,本发明将管道内的介质分为三个区域:纯液相区、气液混合区和纯气相区。对于这三个区域的计算方式有所不同,因此在计算时最重要的就是区域界面的追踪。纯液相区与气液混合区的交界处即是清管器位置,气液混合区和气相区的界限就是气液界面(即水头),因此,本专利建立了模型,以实现清管器的追踪以及气液界面的追踪。
[0066]
本发明讨论了关于清管器排气过程中气液混合区的流型变化规律,对于不同的流型,其计算方法也不同。因此,清管器排气模型的核心就是划分出清管器排气过程中气液混合区出现的各个流型,然后每个流型分别建立模型,最后只需要判断这一时刻出现的流型,并调用相应的模型计算即可。
[0067]
需要说明的是,在各个流型的计算中,对于清管器的运移特性,本发明均采用同一方法,而对于气液界面的追踪以及清管器的追踪计算,则各流型不同。下面结合附图对各个流型进行说明,其中,附图13~附图21中的ha
t
和hb
t
分别表示:t时刻清管器上、下游与液体接触界面的压力。
[0068]
(1)基础流型一(即第一流型)及其排气模型
[0069]
如图2所示,当清管器在某个“基本管段”中运动经过低点以后,会呈现这种流型。清管器推动着整个上坡液塞区连同下游的气相区移动。
[0070]
在对清管器排气进行计算之前,需要对清管器的运移特性进行描述:将清管器假设成有质量的截面对其进行受力分析,在管道中运动清管器在其运动方向受到上游介质的压力,下游介质的压力,自身重力的分力以及管道的摩擦力,结合牛顿定律得出其瞬时运动
方程为:
[0071][0072]
其中:pa—清管器上游界面液体的压力,pa;
[0073]
pb—清管器下游界面液体的压力,pa;
[0074]
δp—清管器与管壁的摩擦阻力,pa;
[0075]
a—管道截面积,m2;
[0076]
m—清管器的质量,kg;
[0077]
θ—管段倾角,rad;
[0078]vp
—清管器运动速度,m/s;
[0079]
图11示出了清管器受力示意图,如图11所示,在清管器排气过程中,清管器有可能出现前进、后退和静止三种运动状态,而这三种运动状态的出现与清管器前后压差的大小有关系。当pa与pb的差值小于清管器的静摩擦δpd的时候,清管器静止不动,而当p
a-pb》δpd时,清管器正向移动,当p
a-pb《δpd时,清管器逆向移动。
[0080]
对于清管器的运移速度求解,由于清管器前后压力与其运动速度的方程中互为未知量,故本文采用“假设—检验”的方法进行迭代求解,具体步骤为:
[0081]
1)根据上一时刻清管器前后的压差判断清管器运动状态。
[0082]
2)若清管器前后压差小于清管器与管道之间的静摩擦δpd,则此时刻清管器的速度等于0,并将速度带入求解这一时刻清管器前后压力。
[0083]
3)若清管器前后压差的绝对值大于清管器与管道之前的静摩擦力δpd,则假设一个清管器的速度v
pig’=0.5*(v
max
+v
min
);v
max
和v
min
分别为设定的清管器运动速度的上限和下限。
[0084]
4)利用v
pig’带入压力计算公式(2)~(6)中计算清管器前后的压力pa和pb。
[0085]
5)用计算出的pa和pb带入公式(1)重新求解清管器速度v
pig
。
[0086]
6)计算v
pig
与v
pig’的误差,若误差小于等于给定值,则结束计算,输出此时的pa、pb和v
pig
。若误差大于给定值,则另v
pig’=v
pig
,进行迭代运算,直到误差满足要求为止。
[0087]
其中压力公式中,pa计算式为:
[0088][0089]
其中:ρ——投产油品的密度,kg/m3;
[0090]
g——重力加速度,取9.81m/s2;
[0091]hp
——清管器的高程,m;
[0092]ho
——管道起点高程,m;
[0093]
λ——水力摩阻系数;
[0094]
l
p
——清管器离管道起点的里程,m,l
p
也可认为是清管器所在位置;
[0095]
d——清管器处管道内径,m;
[0096]
v——清管器上游液体流速;
[0097]
α——惯性项修正系数,αgδvδt为惯性项(δt离散计算时步,δv计算时步内速度变化);
[0098]
po——出口压力,pa。
[0099]
关于λ的计算,与管道内流体的流态有关,而对于石油管道的投产过程中,本文认为流体一直处于紊流的水流光滑区,因此根据列宾宗公式:
[0100][0101][0102]
当处于水力光滑区时,a=0.3164,m=0.25。带入(3)、(4)得到整个摩阻项为:
[0103][0104]
pb的计算式为:
[0105][0106]
其中:ρ'——水的密度,取1000kg/m3;
[0107]hl
——气液界面的高度,m;
[0108]hp
——清管器的高度,m;
[0109]vp
——清管器的速度,m/s;
[0110]
ν——水的运动粘度,取1.01*10-6
m2/s;
[0111]
p——气相区的压力,pa;
[0112]
(l
l-l
p
)——气液界面所处位置与清管器所处位置之间的里程,m;l
l
可认为是气液界面所处的位置,l
p
为可以认为是清管器所在位置。
[0113]
对于流型一,如图2所示,上坡段的液塞体中存在气泡,本发明将该液塞段当做均匀泡状流处理。对于这一段泡状流,摩阻项需要进一步处理:此处参考duklerⅰ关于多相流摩阻项的计算方法,duklerⅰ方法适用于不考虑气体滑脱现象的多向流动,本文所研究的泡状流不存在气液滑脱现象,因此可以应用这种方法来计算摩阻系数。
[0114][0115][0116]
其中:
[0117]
λm——混合摩阻系数;
[0118]
rem——混合雷诺数;
[0119]vm
——混合速度,vm=(q
l
+qg)/a;
[0120]
νm——混合运动粘度,vm=hl*v
l
+(1-hl)*vg;
[0121]
hl——持液率;
[0122]ql
——液体体积流量,m3/s;
[0123]
qg——气体体积流量,m3/s;
[0124]
在计算得到清管器前后压力pa、pb、v
pig
和摩阻项后,由清管器的速度可以追踪清管器下一时步的位置以及气液界面的位置:
[0125]
l
pt+1
=l
pt
+vp
t
*δt
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0126]
l
gt+l
=l
gt
+vp
t
*δt
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0127]
其中:lg——气液界面的位置,m;
[0128]
随后,需要判断下一时刻的流态,如果气液界面没有翻越高点,下一时刻仍然按照流型一计算;如果下一时刻气液界面过了高点,则进入流型二的计算。
[0129]
图13示出了流型一的计算流程图,计算流程为:判断清管器的运动状态;若为静止状态,则清管器的运动速度为0,计算清管器前后压力;若非静止状态,则利用假设-检验法迭代计算清管器的速度,然后计算清管器前后压力;进行气液界面追踪和清管器追踪计算;然后判断气液界面是否过高点,若过高点可转换为基础流型二,若未过高点,则继续用流型一来计算,需要说明的是,图13中从“气液界面过高点”分出的表示“否”的线条,是返回继续调用流型一。
[0130]
(2)基础流型二(即第二流型)及其排气模型
[0131]
如图3所示,当水头到达高点后,会在下坡段形成气液分层流(明渠流动),相应的液体在下坡段低点累积,此时清管器还未翻越高点,仍然在上坡段。即流型二描述的是在液相累积过程中,低点的液体还没有完全堵住下坡段的气体的时候的状态。
[0132]
此时,对于清管器前后压力pa、pb的计算与流型一相同。因此清管器追踪模型的计算以及清管器位置的计算也和流型一相同。然而在这个模型中,气液界面的位置lg一直是在管道低点不变,即:
[0133]
l
pt+1
=l
pt
+vp
t
*δt
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0134]
l
gt+1
=管道低点
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0135]
流型二是一个液体累积的过程,须注意低点累积的液体的量,当累积的液体的体积到达一定程度时,液体将下坡段气体完全封住,之后清管器的移动会压缩气体,变为流型三。
[0136]
图14示出了流型二的计算流程图,计算流程为:判断清管器的运动状态;若为静止状态,则清管器的运动速度为0,计算清管器前后压力;若非静止状态,则利用假设-检验法迭代计算清管器的速度,然后计算清管器前后压力;进行清管器追踪计算;气液界面位于下坡段的低点,计算低点积液体积,判断积液是否足够堵塞低点,若可以,则转换为基础流型三,若不行,则继续用流型二来计算。需要说明的是,图14中从“积液足够堵塞低点”分出的表示“否”的线条,是返回继续调用流型二。
[0137]
(3)基础流型三(即第三流型)及其排气模型
[0138]
如图4所示,当管道低点的积液形成液塞时,液塞将下坡段气体完全封住,上游液体的压力克服不了低点液塞的阻力,因此低点处的液体就会同时向下坡段和上坡段生长。此时,清管器仍未翻越高点,并且在清管器继续向前运动时,会压缩这段被液塞封住的气体。气体的压缩与清管器的推进以及低点液塞的“生长”密不可分,流型三正是描述这种状态的。
[0139]
该流型中,液塞已经形成,由于液相的继续积累,液位向着上坡段与下坡段两边上涨,积气段被压缩,故清管器前方的积气段压力会变化,故pb的计算式需要更新为:
[0140]
[0141]
其中,(l
高点-l
p
)可以为所在u型段内的清管器下游最高点位置与清管器所处位置之间的里程,l
高点
可以认为是所在u型段内的清管器下游最高点位置。
[0142]
而清管器位置与气液界面位置可由以下公式描述:
[0143]
l
pt+1
=l
pt
+v
pt
*δt
ꢀꢀꢀꢀꢀꢀ
(14)
[0144][0145]h1t+1
=0.5*(h
1t
+h
2t
)-pg/ρg
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(16)
[0146]h2t+l
=α(h
1t
+h
2t
)-h
1t+1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(17)
[0147]
其中:
[0148]
h1——下坡段液塞的高度,m;
[0149]
h2——上坡段液塞的高度,m;
[0150]
θ1——下坡段倾角,rad;
[0151]
θ2——上坡段倾角,rad;
[0152]
pg——积气段的气体压力,pa;
[0153]
当清管器越过高点之后,转变为流型四。
[0154]
图15示出了流型三的计算流程图,计算流程为:判断清管器的运动状态;若为静止状态,则清管器的运动速度为0,计算清管器前后压力;若非静止状态,则利用假设-检验法迭代计算清管器的速度,然后计算清管器前后压力;进行清管器追踪计算;判断清管器是否翻过高点,若翻过,则转换为基础流型四,若没有,则判断气液界面是否过第二个高点,若过高点,则转换为后续的流型六,否则继续用流型三来计算,需要说明的是,图15中从“气液界面过高点”分出的表示“否”的线条,是返回继续调用流型三。
[0155]
(4)基础流型四(即第四流型)及其排气模型
[0156]
当清管器越过高点之后,清管器会推动气体向下运动进一步压缩气体,而随着下坡积气段被不断压缩,压力增大到一定程度后,会使得清管器前端压力高于后端压力,从而致使清管器减速,甚至反向运动。故在此流型下,清管器会经历一系列加速、减速运动最后趋于稳定的一个过程。
[0157]
此时,如图5所示,清管器前端与气体之前会出现一个多相流的液塞区。
[0158]
如图12所示:
[0159]
a区为清管器上游的液相区,就是清管器流动过后投放的油品流动的区域,这一段液体的压降的计算与前几个模型相同。
[0160]
b区为清管器后的液相流动区域,清管器推动一小段液体向前移动,这一小段液体主要是由于惯性作用聚集在清管器前端并且可以起到一定润滑的作用;因此在计算时,这一段液体的压力就是清管器下游压力pb。由两相界面稳定可知,液塞的压力就等于气相压力,因此在该流型中pb=pg。
[0161]
c区是清管器下游的层流区域,也是积气段的区域,这一部分气体的量是已知的,可以根据气体的量和积气段的体积计算气体的压力。
[0162]
对于清管器位置和气液界面位置的追踪,采用与流型三相同的计算方式,即参照(14)~(17)式子,不同的是pb的计算方式。而当h
1t+1
《=0时,说明气体末端已经到到了管段最低点,变为流型五。
[0163]
流型四的计算流程图可见图16。
[0164]
(5)基础流型五(即第五流型)及其排气模型
[0165]
如图6所示,当积气段尾部到达管段最低点后,尾部的气相会以气泡或者小积气段的形式向上坡段运移,此过程称为积气段的破碎。本专利假设气泡以小气泡的方式均匀的分散在液体中,形成均匀泡状流。此时清管器在下坡段向前运移,推动积气段的破碎。
[0166]
此时,上坡段的压降计算与流型一相似,可由公式(7)、(8)计算,而清管器前后的流体分区与流型四相同。清管器前后压力的计算以及清管器的追踪也与流型四相同,不同的是在上坡段,摩阻项会以泡状流的公式进行计算。
[0167]
流型五的计算流程图可见图17。
[0168]
在流型一至流型五都完成描述和计算后,为了使得它们之间的计算具有连续性和逻辑性,本专利给出了上述流型的转换关系。
[0169]
图7示出了本发明的五种基础流型转换关系图,图7中的
①②③④⑤
分布表示流型一至流型五。如图7所示,投放清管器的时处于流型一,清管器推动液塞移动。当水头翻越高点之后,在下坡段形成分层流;随后,液体在低点累积,此时处于流型二。当液体体积增大到一定程度后,形成液塞,下坡段的气体被液塞封住,清管器的移动会推动液体的流动,进而液塞生长,气体被压缩,此时处于流型三。清管器越过高点以后向下俯冲,在经历一系列加速、减速过程后趋于稳定,此时处于流型四。随着清管器的推进,积气段向下移动,当积气段尾部到达管段低点后,其尾部位于低点后上坡段的部分在浮力的作用下发生破碎,会以气泡的形式在上坡段中运移,与上坡段液体混合形成均匀泡状流。当积气段破碎完毕之后,清管器随之通过了低点,此时又回到流型一,完成了一次流型的循环。
[0170]
本发明所描述的前五种流型循环中,均是在“基础管段”的基础上搭建的,而在实际工程中,各个有着不同高差和长度的“基础管段”相互连接,相互影响。所以基于以上原因,需要基于五种基础流型,形成以下组合流型。
[0171]
在五种基础流型中,流型三、四都存在气体憋压的情况,而这种情况需要被压缩的气体后面要有足够的背压支持。然而对于连续大落差管道,可能会出现在气体憋压的过程中,水头又越过了第二个高点,此时液体的背压就会消失,气体无法再继续压缩,此时这一段被封存的气体会随液体共同移动,在水头越过的第二个高点后面又会出现液体的累积与液塞的生长。为了描述这种情况,本发明提出了以下的组合流型来描述该过程。
[0172]
(6)组合流型及其排气模型(包含流型六、流型七、流型八、流型九,即第六、第七、第八和第九流型)
[0173]
图8示出了本发明的组合流型六、流型七的示意图,图9示出了本发明的组合流型八、流型九的示意图,其中,图8中的
⑥
和
⑦
分别表示模型六和模型七,图9中的
⑧
和
⑨
分别表示模型八和模型九。如图8、图9所示,这四种组合流型都是在基础流型上演变而来,其与基础流型不同之处在于,这些流型是在两个相连接的“基础管段”中进行流型分析的,充分考虑了上游“基础管段”对下游“基础管段”的影响。
[0174]
这四种组合流型的共同特点是,由于第二个“基础管段”的高程较低,第一个“基础管段”的上坡段很短,无法提供足够背压,使得第一个“基础管段”下坡积气段无法得到充分的压缩,在水头翻越高点后,在第二个“基础管段”形成了液体累积或者液塞。
[0175]
此时,各组合流型的排气计算方法如下:
[0176]
1)组合流型六和组合流型八,都在第二个高点后面又出现了气液分层流和液体的累积,但并未形成液塞。此时,本专利假设清管器后积气段,长度和压力都不变,则组合流型六和组合流型八的压力分布计算与气液界面、清管器位置跟踪与流型二相似。组合流型六和组合流型八的区别在于清管器的位置,组合流型六中清管器位置并未翻越第一个高点,而组合流型八中清管器已经翻越。组合流型六和组合流型八的计算流程图分别可见图18和图20。
[0177]
2)组合流型七和组合流型九都在第二个高点后面形成了新的液塞,类似地,本专利假设清管器后积气段,长度和压力都不变,则组合流型七和组合流型九的压力分布计算与气液界面、清管器位置跟踪与流型三相似。组合流型七和组合流型九的区别在于清管器的位置,组合流型七中清管器位置并未翻越第一个高点,而组合流型九中清管器已经翻越。流型七和流型九的计算流程图分别可见图19和图21。
[0178]
上述四种流型将基本流型的计算方法进行了组合。
[0179]
(7)全流程的清管器排气计算方法
[0180]
在九种基础流型和组合流型均完成描述和计算后,为了使得它们之间的计算具有连续性和逻辑性,本发明给出了上述流型的转换关系,如图10所示,九种流型之间会相互演变和转化,图7中的
①
至
⑨
分布表示流型一至流型九。
[0181]
组合流型是基础流型在第一个“基础管段”中背压不足,积气段无法得到充分压缩的情况下,水头翻越高点后,从而在第二个“基础管段”中形成新的积气段而转变而来的;而组合流型中,若第一个、第二个积气段由于在清管器推进过程中汇合,则会合并成一个积气段,此时又转变为基础流型。当然,基础流型和组合流型各自之间也会相互转化。
[0182]
需要说明的是,在具有连续大落差和u型液体管道水联运投产的实际工程中,若需启用清管器排气的方法,需要对气液界面位置(水头位置)进行判断,并且考虑到清管器的安全稳定运行因素,须在上坡液塞段进行清管器的投放。在此前提下,会呈现:基础流型一、基础流型二、基础流型三这三种基础流型;随后,需要根据气液界面位置和下游低点的液相积累程度判断具体所处的初始流型。在确定初始时刻的流型后,投放清管器进行排气,而全流程的清管器排气计算也从此初始流型开始。随着气液界面和清管器的运移,九种流型之间会开始相互转化。
[0183]
因此,本发明的连续大落差和u型液体管道投产过程中清管器排气方法包括:
[0184]
1)确定初始流型,并从此流型开始进行清管器排气计算,更新气液界面位置和清管器位置;
[0185]
2)根据更新后的气液界面位置和清管器位置,和各流型之间的转变条件,判定流型之间的转变。若满足条件,则转变为新的流型,并调用新流型的计算方法,并更新气液界面位置和清管器位置;若不满足条件,则继续调用原流型计算方法进行计算;
[0186]
3)重复2)中的计算过程,直到计算结束。
[0187]
其中,全流程的计算方法框图如图22所示。
[0188]
通过上述计算方法,就可以完成在具有连续大落差和u型液体管道投产过程中,清管器排气的描述,以及具体计算,形成具有连续大落差和u型液体管道投产过程中清管器排气方法。
[0189]
尽管上面已经结合示例性实施例及附图描述了本发明,但是本领域普通技术人员应该清楚,在不脱离权利要求的精神和范围的情况下,可以对上述实施例进行各种修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1