一种智能清洗及烘干方法与流程
1.本发明涉及清洗设备技术领域,尤其涉及一种智能清洗及烘干方法。
背景技术:
2.在我们日常的生产、生活中,常常遇到大量使用篮子或类篮形物的场合,如商场、超市、工厂以及运输货车等,这些场合对篮子的使用量大、使用率高,且易碰到风吹、日晒、雨淋以及油污等情况,导致篮子沾染油污、泥水及发霉物质,而由于篮子的形状特殊,其存在许多的卫生死角,不易清洗干净。如若采用人工清洗则费时费力,效率低下,人工成本昂贵,且往往伴随着篮子破损划伤等情况的出现,因此针对以上问题设计一种智能清洗及烘干方法。
技术实现要素:
3.为了解决上述的技术问题,克服现有技术中的不足,本发明提供智能清洗及烘干方法,包括以下步骤:
4.一,接通智能清洗机的电源,智能清洗机启动,空压机组启动,至气压达到预设正常值;
5.二,通过人机交互触摸屏设定运行参数,同时监控设备运行状态;
6.三,按下人机交互触摸屏下侧的复位按钮,继而按下原点按钮,智能清洗机回到原点位置;
7.四,清洗和/或烘干:在第一组篮筐锁紧盘上放置篮筐后按下第一启动开关,智能清洗机的将第一组篮筐锁紧,继而按下第二启动开关,智能清洗机进入工位并开始作业,此时第一组篮筐在清洗箱或烘干箱中进行清洗或烘干作业;完成作业后在第二组篮筐锁紧盘上放置篮筐后按下第一启动开关,智能清洗机将第二组篮筐锁紧,再次按下第二启动开关,智能清洗机进入下一工位并开始作业,如此循环往复直至第一组篮筐锁紧盘完成全部清洗和/或烘干作业后将第一组篮筐取出,并于下一工位在第一组篮筐锁紧盘重新放置待洗篮筐,直至全部篮筐清洗完成;
8.五,完成全部作业后,按下停止按钮,关掉电源。
9.作为上述技术方案进一步的优选技术方案,所述清洗机包括主体框架结构、多个覆盖于主体框架结构外部的面板、连接于主体框架结构底部的清洗主机组以及多个清洗箱和/或多个烘干箱,所述清洗主机组包括工位转换机构、在周向上均匀连接在工位转换机构上的锁紧旋转工装、分别带动工位转换机构和锁紧旋转工装转动的第一伺服电机和第二伺服电机以及分别带动锁紧旋转工装升降和控制锁紧旋转工装锁紧篮筐的第一气缸和第二气缸,多个所述清洗箱和/或多个所述烘干箱对应配置在所述锁紧旋转工装的下方,所述锁紧旋转工装包括篮筐锁紧盘。
10.作为上述技术方案进一步的优选技术方案,所述清洗箱包括中温药水箱和/或高温清水箱且其侧壁顶部和侧壁底部上分别配设有进水阀和排水阀,所述中温药水箱和/或
高温清水箱的底部配设有一组电加热装置。
11.作为上述技术方案进一步的优选技术方案,所述清洗机还包括空压机组、高压气罐、高压气体加热仓以及负压风机;所述空压机组通过管路与高压气罐形成连接,所述高压气罐通过管路与高压气体加热仓形成连接,所述高压气体加热仓通过高压气体阀以及管路分别与多个进气阀形成连接,所述进气阀在清洗箱上均有设置,所述烘干箱为高压气体烘干箱且其底部设有出风口,所述出风口与一负压风机形成连接;所述高压气体烘干箱一侧壁上设有高压通气导管,高压通气导管上设有多个高压喷嘴,所述高压通气导管通过管路与高压气体阀形成连接。
12.作为上述技术方案进一步的优选技术方案,所述清洗机还包括超声波清洗装置,其包括通过管路相连接的超声波清洗主机以及超声波换能器,所述超声波清洗主机配置在主体框架结构内部,超声波换能器分别配置在清洗箱的两侧壁处。
13.作为上述技术方案进一步的优选技术方案,所述面板包括前面板、后面板、左侧面板、右侧面板、顶部面板以及底部面板,所述前面板的中部具有一扇形结构,扇形结构的左右两端分别开设有收取窗口和放置窗口,且扇形结构的中部固设一人机交互触摸屏。
14.作为上述技术方案进一步的优选技术方案,所述清洗机还包括角度编码器、温度传感器、气压传感器、转速编码器以及位置传感器;所述角度编码器配置于第一伺服电机的输出机构处;所述温度传感器配置在中温药水箱、高温清水箱以及高压气体烘干箱内;所述气压传感器配置在高压气体加热仓以及高压气罐的输出端;所述转速编码器配置于第二伺服电机的输出机构处;所述位置传感器配置于主体框架结构上的与各篮筐锁紧盘相对应位置处;还包括三色灯、蜂鸣器以及配电柜,三色灯和蜂鸣器配设在前面板上,所述配电柜配置在主体框架结构内部,配电柜内配设有工频电源、控制器、整流器、plc控制模块,工频电源分别为空压机组、负压风机、电加热装置、超声清洗装置、plc控制模块提供电源且分别通过控制器为第一伺服电机和第二伺服电机提供电源,所述工频电源还连接有外接插座,所述plc控制模块与第一伺服电机、第二伺服电机、第一气缸、第二气缸、电加热装置、空压机组、高压气体加热仓、进水阀、排水阀、进气阀、超声波清洗装置、高压空气阀、负压风机、角度编码器、温度传感器、气压传感器、转速编码器、位置传感器、三色灯以及蜂鸣器均形成电性连接,工频电源和整流器为所述人机交互触摸屏提供电源,人机交互触摸屏与控制器以及plc控制模块形成电性连接。
15.本发明还包括软件,用于获取按钮和/或开关以及人机交互触摸屏的调控信息并根据调控信息调整智能洗篮子机的工作状态,同时通过跟踪控制器、plc控制模块、硬件机构和各传感器的工况信息、锁定信息和报警信息来实现监控、报警以及历史数据查验。
16.可选的,本发明包括连接于主体框架结构底部的清洗主机组、两个清洗箱和一个烘干箱,所述清洗主机组包括一个工位转换机构和五个在周向上均匀连接在工位转换机构上的锁紧旋转工装。
17.可选的,本发明包括连接于主体框架结构底部的清洗主机组、一个清洗箱,所述清洗主机组包括一个工位转换机构和三个在周向上均匀连接在工位转换机构上的锁紧旋转工装。
18.可选的,本发明包括连接于主体框架结构底部的清洗主机组、一个烘干箱,所述清洗主机组包括一个工位转换机构和三个在周向上均匀连接在工位转换机构上的锁紧旋转
工装。
19.与现有技术相比,本发明具有以下有益效果:本发明设计合理,结构简单,操作简便,清洗效果好,单小时清洗量可达700个以上,不仅可以清洗篮筐,还可以对各种筐型物品进行清洗,稳定性好,且具有超声波水洗功能和烘干功能,省去了被洗物的晾晒过程,避免了二次污染,同时节省了晾晒空间和时间,提高了作业效率,降低了人力成本;通过锁紧旋转工装的设置实现了篮筐的锁紧和清洗,通过工位转换机构的设置实现了篮筐在各工位之间的转换,通过设置人机交互触摸屏,使得操作人员对设备的运行状态一目了然,使得操控更加方便,对运行数据的调整和历史数据的检索更加方便。
附图说明
20.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
21.图1为本发明实施例1中智能清洗及烘干方法的流程图;
22.图2为本发明实施例1的智能清洗机的外部立体结构示意图;
23.图3为本发明实施例1的智能清洗机的内部立体结构示意图;
24.图4为本发明实施例1的智能清洗机的部分立体结构示意图;
25.图5为本发明实施例1的高压气体烘干箱内部部分结构示意图;
26.图6为本发明实施例1的人机交互触摸屏的运行操控界面;
27.图7为本发明实施例1的人机交互触摸屏的参数设置界面;
28.图8为本发明实施例1的人机交互触摸屏的监测报警界面;
29.图9为本发明实施例1的人机交互触摸屏的密码设置界面;
30.图10为本发明实施例2的清洗主机组、清洗箱的立体结构示意图;
31.图11为本发明实施例2的内部立体结构示意图。
32.图12为本发明实施例3的内部立体结构示意图。
33.图中:1、前面板,2、收取窗口,3、人机交互触摸屏,4、放置窗口,5、高压气罐,6、中温药水箱,7、超声波换能器,8、高温清水箱,9、高压气体加热仓,10、负压风机,11、高压气体烘干箱,12、超声波清洗主机,13、空压机组,14、配电柜,15、清洗主机组,16、主体框架结构,17、清洗箱,18、烘干箱,19、工位转换机构,20、锁紧旋转工装,112、高压通气导管,114、高压喷嘴,151、第一伺服电机,152、篮筐锁紧盘,156、第二伺服电机,1510、第二气缸,1513、第一气缸。
具体实施方式
34.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
35.实施例1。
36.参见图1至图9,本发明实施例中的一种智能清洗及烘干方法,包括以下步骤:
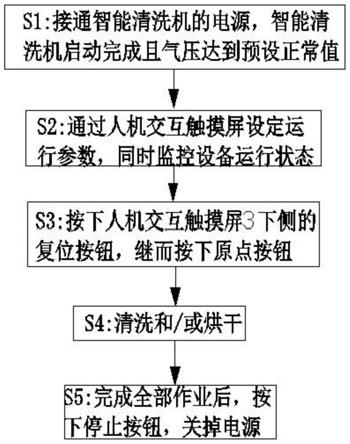
37.s1,接通智能清洗机的电源,智能清洗机启动完成且气压达到预设正常值,作为优选,将气压预设值设为0.8mpa;
38.s2,通过人机交互触摸屏3设定运行参数,同时监控设备运行状态;
39.s3,按下人机交互触摸屏3下侧的复位按钮,继而按下原点按钮,智能清洗机回到原点位置;
40.s4,清洗和烘干:在第一组篮筐锁紧盘152上放置篮筐后按下第一启动开关,智能清洗机的将第一组篮筐锁紧,继而按下第二启动开关,智能清洗机进入第一工位并开始作业,此时第一组篮筐在中温药水箱6中进行清洗作业;完成作业后在第二组篮筐锁紧盘152上放置篮筐后按下第一启动开关,智能清洗机将第二组篮筐锁紧,再次按下第二启动开关,智能清洗机进入第二工位并开始作业,此时第一组篮筐在高温清水箱8中进行清洗作业;完成作业后在第三组篮筐锁紧盘152上放置篮筐后按下第一启动开关,智能清洗机将第三组篮筐锁紧,再次按下第二启动开关,智能清洗机进入第三工位并开始作业,此时第一组篮筐在高压气体烘干箱11中进行烘干、冷却作业;完成作业后在第四组篮筐锁紧盘152上放置篮筐后按下第一启动开关,智能清洗机将第四组篮筐锁紧,再次按下第二启动开关,智能清洗机开始清洗作业,此时第一组篮筐已输送至收取窗口2处,取走篮筐并完成作业后,在第五组篮筐锁紧盘152上放置篮筐后按下第一启动开关,智能清洗机将第五组篮筐锁紧,再次按下第二启动开关,智能清洗机开始清洗作业,此时第一组篮筐已输送至放置窗口4处,再次在第一组篮筐锁紧盘152上放置篮筐并将第二组篮筐锁紧盘152上的篮筐取走并完成作业后按下第一启动开关,智能清洗机再次将第一组篮筐锁紧盘152锁紧,再次按下第二启动开关,智能清洗机开始清洗作业,如此循环往复直至完成全部清洗作业;
41.s5:完成全部作业后,按下停止按钮,关掉电源。
42.本发明实施例中的清洗机包括主体框架结构16、多个覆盖于主体框架结构16外部的面板、连接于主体框架结构16底部的清洗主机组15以及两个清洗箱和一个烘干箱,所述清洗主机组15包括工位转换机构、在周向上均匀连接在工位转换机构上的锁紧旋转工装、分别带动工位转换机构和锁紧旋转工装转动的第一伺服电机151和第二伺服电机156以及分别带动锁紧旋转工装升降和控制锁紧旋转工装锁紧篮筐的第一气缸1513和第二气缸1510,两个所述清洗箱和一个所述烘干箱对应配置在所述锁紧旋转工装的下方,所述锁紧旋转工装包括篮筐锁紧盘。
43.发明实施例中的清洗箱包括一个中温药水箱6和一个高温清水箱8且其侧壁顶部和侧壁底部上分别配设有进水阀和排水阀,所述中温药水箱6和高温清水箱8的底部均配设有一组电加热装置。电加热装置采用电加热管,电加热管的设置方便对中温药水箱6和高温清洗箱内清洗液的加热。
44.发明实施例中的清洗机还包括空压机组13、高压气罐5、高压气体加热仓9以及负压风机10;所述空压机组13通过管路与高压气罐5形成连接,所述高压气罐5通过管路与高压气体加热仓9形成连接,所述高压气体加热仓9通过高压气体阀以及管路分别与多个进气阀形成连接,所述进气阀在清洗箱上均有设置,所述烘干箱为高压气体烘干箱11且其底部设有出风口,所述出风口与一负压风机10形成连接;所述高压气体烘干箱11一侧壁上设有高压通气导管112,高压通气导管112上设有多个高压喷嘴114,所述高压通气导管112通过
管路与高压气体阀形成连接。空压机组13、高压气罐5和高压气体加热仓9的设置方便在清洗时为中温药水箱6和高温清水箱8中排入气体,配合超声波清洗装置对待洗物进行清洗,高压气体加热仓9以及负压风机10的设置则方便对被洗物品进行烘干和冷却,加速了冷却过程的同时还避免了晾晒过程,进一步提高了工作效率还避免了二次污染。通过高压通气导管112和高压喷嘴114的设置则在对被洗物品进行烘干时实现了高压气体的均匀喷射,加快了烘干效率。
45.发明实施例中的清洗机还包括超声波清洗装置,其包括通过管路相连接的超声波清洗主机12以及超声波换能器7,所述超声波清洗主机12配置在主体框架结构16内部,超声波换能器7分别配置在清洗箱的两侧壁处。作为优选,中温药水箱6中的清洗药液采用常用的清洗液,选择在清水中加入洗涤剂或洗衣粉即可。超声波清洗装置的设置便于待洗物品的清洗,提升了清洗效果和效率。
46.发明实施例中的面板包括前面板1、后面板、左侧面板、右侧面板、顶部面板以及底部面板,所述前面板1的中部具有一扇形结构,扇形结构的左右两端分别开设有收取窗口2和放置窗口4,且扇形结构的中部固设一人机交互触摸屏3。收取窗口2和放置窗口4的设置方便了操作人员对篮筐的收取和放置。人机交互触摸屏3采用工业级触摸屏,其包括屏幕显示区以及操作区,所述屏幕显示区包括可互相切换的运行操控界面、参数设置界面、监测报警界面以及密码设置界面,所述操作区设有急停按钮、复位按钮、原点按钮、停止按钮、第一启动按钮以及第二启动按钮。通过设置人机交互触摸屏3,使得操作人员对设备的运行状态一目了然,使得操控更加方便,对运行数据的调整和历史数据的检索更加方便。
47.本发明实施例中的清洗机还包括角度编码器、温度传感器、气压传感器、转速编码器以及位置传感器;所述角度编码器配置于第一伺服电机151的输出机构处;所述温度传感器配置在中温药水箱5、高温清水箱8以及高压气体烘干箱11内;所述气压传感器配置在高压气体加热仓9以及高压气罐5的输出端;所述转速编码器配置于第二伺服电机156的输出机构处;所述位置传感器配置于主体框架结构16上的与各篮筐锁紧盘152相对应位置处;还包括三色灯、蜂鸣器以及配电柜14,三色灯和蜂鸣器配设在前面板上,所述配电柜配置在主体框架结构16内部,配电柜14内配设有工频电源、控制器、整流器、plc控制模块,工频电源分别为空压机组13、负压风机10、电加热装置、超声清洗装置12、plc控制模块提供电源且分别通过控制器为第一伺服电机151和第二伺服电机156提供电源,所述工频电源还连接有外接插座,所述plc控制模块与第一伺服电机151、第二伺服电机152、第一气缸1513、第二气缸1510、电加热装置、空压机组13、高压气体加热仓9、进水阀、排水阀、进气阀、超声波清洗装置12、高压空气阀、负压风机10、角度编码器、温度传感器、气压传感器、转速编码器、位置传感器、三色灯以及蜂鸣器均形成电性连接,工频电源和整流器为所述人机交互触摸屏提供电源,人机交互触摸屏与控制器以及plc控制模块形成电性连接。角度编码器、温度传感器、气压传感器、转速编码器以及位置传感器的设置实现了对智能清洗机各个机构运行数据的监控、反馈。配电柜14中电源、控制器和plc控制模块的设置实现了对整个设备的智能控制。
48.本发明实施例中的智能清洗机还包括软件,用于获取按钮以及人机交互触摸屏3的调控信息并根据调控信息调整智能洗篮子机的工作状态,同时通过跟踪控制器、plc控制模块、硬件机构和各传感器的工况信息、锁定信息和报警信息来实现监控、报警以及历史数据查验。
49.实施例2。
50.参见图10至图11,本发明实施例中的一种智能清洗及烘干方法,包括以下步骤:
51.s1,接通智能清洗机的电源,智能清洗机启动完成且气压达到预设正常值,作为优选,将气压预设值设为0.8mpa;
52.s2,通过人机交互触摸屏设定运行参数,同时监控设备运行状态;
53.s3,按下人机交互触摸屏下侧的复位按钮,继而按下原点按钮,智能清洗机回到原点位置;
54.s4,清洗:在第一组篮筐锁紧盘上放置篮筐后按下第一启动开关,智能清洗机的将第一组篮筐锁紧,继而按下第二启动开关,智能清洗机进入工位并开始作业,此时第一组篮筐在清水箱中进行清洗作业;完成作业后在第二组篮筐锁紧盘上放置篮筐后按下第一启动开关,智能清洗机将第二组篮筐锁紧,再次按下第二启动开关,此时第二组篮筐进入清水箱中进行清洗作业,同时将第一组篮筐锁紧盘中的篮筐取出,并于下一工位在第一组篮筐锁紧盘重新放置待洗篮筐,如此循环往复,直至全部篮筐清洗完成;
55.s5,完成全部作业后,按下停止按钮,关掉电源。
56.本发明实施例中的清洗机包括主体框架结构16、多个覆盖于主体框架结构16外部的面板、连接于主体框架结构16底部的清洗主机组以及一个清洗箱17,所述清洗主机组包括一个工位转换机构19、三个在周向上均匀连接在工位转换机构19上的锁紧旋转工装20、分别带动工位转换机构和锁紧旋转工装转动的第一伺服电机151和第二伺服电机156以及分别带动锁紧旋转工装升降和控制锁紧旋转工装锁紧篮筐的第一气缸1513和第二气缸1510,所述清洗箱对应配置在其中一个所述锁紧旋转工装20的下方。
57.本实施例中的清洗箱17为清水箱且其侧壁顶部和侧壁底部上分别配设有进水阀和排水阀,所述进水阀通过管路和水泵与水箱形成连接,所述排水阀通过管路和水泵与污水处理池形成连接;清水箱的底部配设有一组电加热装置,所述电加热装置采用电加热管图中未示出。电加热管的设置方便对清水箱中的清水进行加热。
58.本实施例中的智能清洗机还包括空压机组13、高压气罐5、高压气体加热仓9;所述空压机组13通过管路与高压气罐5形成连接,所述高压气罐5通过管路与高压气体加热仓9形成连接,所述高压气体加热仓9通过高压气体阀以及管路与进气阀形成连接,所述进气阀配置在清水箱上。
59.本实施例中的智能清洗机还包括超声波清洗装置,其包括通过管路相连接的超声波清洗主机12以及超声波换能器7,所述超声波清洗主机12通过螺栓连接在主体框架结构上,超声波换能器7配置在清水箱内部的两侧壁处。
60.本实施例中的面板、人机交互触摸屏、传感器、三色灯、蜂鸣器、配电柜以及软件与实施例1中的原理相同,此处不再赘述。
61.实施例3。
62.参见图12,本发明实施例中的智能清洗机的一种智能烘干方法,包括以下步骤:
63.s1,接通智能清洗机的电源,智能清洗机启动完成且气压达到预设正常值,作为优选,将气压预设值设为0.8mpa;
64.s2,通过人机交互触摸屏设定运行参数,同时监控设备运行状态;
65.s3,按下人机交互触摸屏下侧的复位按钮,继而按下原点按钮,智能清洗机回到原
点位置;
66.s4,烘干:在第一组篮筐锁紧盘上放置篮筐后按下第一启动开关,智能清洗机的将第一组篮筐锁紧,继而按下第二启动开关,智能清洗机进入工位并开始作业,此时第一组篮筐在高压气体烘干箱中进行烘干作业;完成作业后在第二组篮筐锁紧盘上放置篮筐后按下第一启动开关,智能清洗机将第二组篮筐锁紧,再次按下第二启动开关,此时第二组篮筐进入高压气体烘干箱中进行烘干作业,同时将第一组篮筐锁紧盘中的篮筐取出,并于下一工位在第一组篮筐锁紧盘重新放置待烘干篮筐,如此循环往复,直至全部篮筐烘干完成;
67.s5,完成全部作业后,按下停止按钮,关掉电源。
68.本发明实施例中的清洗机包括主体框架结构16、多个覆盖于主体框架结构16外部的面板、连接于主体框架结构16底部的清洗主机组以及一个烘干箱18,所述清洗主机组包括一个工位转换机构、三个在周向上均匀连接在工位转换机构上的锁紧旋转工装、分别带动工位转换机构和锁紧旋转工装转动的第一伺服电机151和第二伺服电机156以及分别带动锁紧旋转工装升降和控制锁紧旋转工装锁紧篮筐的第一气缸1513和第二气缸1510,所述烘干箱18对应配置在其中一个所述锁紧旋转工装的下方。
69.本发明实施例中的智能清洗机还包括空压机组13、高压气罐5、高压气体加热仓9以及负压风机10;所述空压机组13通过管路与高压气罐5形成连接,所述高压气罐5通过管路与高压气体加热仓9形成连接,烘干箱18为高压气体烘干箱且其底部设有出风口,所述出风口与一负压风机10和冷干机形成连接;本实施例中的高压气体烘干箱的结构以及内部配设的高压通气导管和高压喷嘴均与实施例1相同,此处不再赘述。
70.本实施例中的面板、人机交互触摸屏、传感器、三色灯、蜂鸣器、配电柜以及软件与实施例1中的相同,此处不再赘述。
71.在本发明的描述中,需要理解的是,术语“同轴”、“底部”、“一端”、“顶部”、“中部”、“另一端”、“上”、“一侧”、“顶部”、“内”、“前部”、“中央”、“两端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
72.此外,术语“第一”、“第二”、“第三”、“第四”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量,由此,限定有“第一”、“第二”、“第三”、“第四”的特征可以明示或者隐含地包括至少一个该特征。
73.在本发明中,除非另有明确的规定和限定,术语“安装”、“设置”、“连接”、“固定”、“旋接”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
74.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1