一种硅棒端面的擦拭装置及硅棒处理系统的制作方法
1.本实用新型涉及光伏技术领域,尤其涉及一种硅棒端面的擦拭装置及硅棒处理系统。
背景技术:
2.在硅棒的生产过程中,被切断机切断的圆形硅棒,需要输送到屏蔽室中进行使用寿命和电阻检测。切断后的圆形硅棒的端面会存在硅泥等脏污。在检测硅棒使用寿命和电阻的过程中,这些硅泥等脏污容易影响检测的准确性,
3.现有技术中,通常需要人工擦拭硅棒的端面,以确保检测结果的准确性。这种人工擦拭硅棒端面的方式,不仅效率低,而且擦拭质量较差。
技术实现要素:
4.本实用新型的目的在于提供一种硅棒端面的擦拭装置及硅棒处理系统,以提高擦拭硅棒端面的质量和工作效率。
5.第一方面,本实用新型提供一种硅棒端面的擦拭装置。该硅棒端面的擦拭装置包括支架、擦拭件、驱动件以及硅棒承载机构。擦拭件具有平面状的擦拭面,擦拭件设在驱动件的动力输出端。硅棒承载机构位于擦拭件具有擦拭面的一侧。驱动件设在支架上;驱动件用于驱动擦拭件擦拭硅棒端面。
6.采用上述技术方案时,硅棒端面的擦拭装置包括硅棒承载机构、用于擦拭硅棒端面的擦拭件和驱动擦拭件的驱动件。硅棒承载机构上承载有硅棒。擦拭件具有的擦拭面为平面状,被切断后的硅棒的端面也为平面状,两者形状相匹配。当擦拭装置擦拭硅棒端面,擦拭件的擦拭面与硅棒承载机构位置相对应,擦拭件的擦拭面与硅棒端面相接触,平面状的擦拭面与硅棒端面具有较大的接触面积,可以提高擦拭效率,并实现较好的擦拭效果。与此同时,驱动件可以驱动擦拭件以较大的接触面和较高的速度擦拭硅棒端面。结合擦拭件和驱动件的情况下,可以实现自动化擦拭硅棒端面的操作,提高擦拭硅棒端面的工作效率和擦拭效果。
7.在一些实现方式中,上述擦拭件为盘状结构、板状结构或条状结构。当擦拭件为盘状结构时,其擦拭面为盘状,擦拭面与圆形硅棒端面的形状匹配度较高,可以以较小的擦拭面实现对硅棒端面的覆盖。此时,在确保擦拭面与硅棒端面具有较大接触面积的情况下,可以节省擦拭件材料。当擦拭件为板状结构或条状结构,擦拭面为矩形或长方形。在擦拭硅棒端面的过程中,擦拭件的棱边可以对硅棒端面起到刮削的作用,从而可以方便的刮除硅棒端面上的硅泥。
8.在一些实现方式中,上述擦拭件为旋转擦拭件或往复运动擦拭件。此时,擦拭件与硅棒端面之间均可以产生动摩擦力。在动摩擦力的作用下,附着在硅棒端面的硅泥可以被方便的擦去。
9.在一些实现方式中,上述硅棒端面的擦拭装置还包括柔性接触层。柔性接触层设
在擦拭件的擦拭面上。此时,柔性接触层不仅可以与硅棒端面之间产生较大的摩擦力,而且柔性接触层与硅棒端面接触时,具有缓冲作用,可以减少擦拭件对硅棒端面的损伤。
10.在一些实现方式中,上述硅棒承载机构为硅棒运输机构或硅棒固定机构。此时,硅棒承载机构可以用于承载固定硅棒,也可以用于承载运输硅棒。无论硅棒处于运动状态,还是固定状态,均可以对其进行擦拭处理。
11.在一些实现方式中,上述驱动件包括电机、气缸或液压缸。这些驱动件均可以为擦拭件提供擦拭动作所需的动力。
12.在一些实现方式中,上述硅棒端面的擦拭装置还包括第一移动机构。第一移动机构的固定端设在支架上,驱动件设在第一移动机构的移动端;第一移动机构用于支持驱动件沿着第一方向移动。此时,第一移动机构的移动端可以带着驱动件和擦拭件沿着第一方向移动,从而利用第一移动装置可以实现擦拭件自动化靠近硅棒端面,自动化远离硅棒端面的操作,进而提高擦拭装置的自动化程度。
13.在一些实现方式中,上述硅棒端面的擦拭装置还包括第二移动机构。第一移动机构的固定端通过第二移动机构可移动设置在支架上,第二移动机构用于支持第一移动机构沿着第二方向移动;或者,驱动件通过第二移动机构可移动设置在第一移动机构的移动端,第二移动机构用于支持驱动件沿着第二方向移动。此时,第二移动机构的设置,可以使驱动件和擦拭件在第二方向上移动。利用第一移动机构和第二移动机构,可以实现驱动件和擦拭件在两个方向上自动化靠近硅棒端面,自动化远离硅棒端面。基于此,可以灵活的调控擦拭件的位置,便于擦拭件对准硅棒端面。
14.在一些实现方式中,上述第一方向与第二方向具有夹角,夹角为90
°
。此时,可以在垂直硅棒端面和平行硅棒端面的两个方向上,实现擦拭件的自动化靠近和自动化远离。其中,在平行硅棒端面的方向上,擦拭件的自动化靠近硅棒端面,接触硅棒端面,以及远离硅棒端面的过程,可以对硅棒端面起到刮削的作用,便于刮除位于硅棒端面的硅泥。
15.在一些实现方式中,上述硅棒端面的擦拭装置还包括移动控制开关。移动控制开关与第一移动机构电连接。此时,可以通过移动控制开关控制第一移动机构的移动,提高其自动化性能。
16.在一些实现方式中,上述移动控制开关为压力开关。压力开关的压力感应触头设在擦拭件上,压力开关与第一移动机构电连接。此时,可以通过擦拭件感应到的压力,及时控制第一移动机构停止,减少第一移动机构驱动擦拭件碰撞硅棒端面的几率,减少对硅棒端面的损伤。
17.第二方面,本实用新型还提供一种硅棒处理系统。该硅棒处理系统包括至少一个第一方面或第一方面任一可能的实现方式所描述的硅棒端面的擦拭装置。
18.第二方面所提供的硅棒处理系统的有益效果,可以参考第一方面或第一方面任一可能的实现方式所描述的硅棒端面的擦拭装置的有益效果,在此不做赘述。
19.在一些实现方式中,上述硅棒承载机构为硅棒运输机构,用于将所述硅棒运输至所述擦拭件具有擦拭面的一侧。硅棒处理系统还包括可控限位件。擦拭件有两个,分别位于硅棒运输机构的运输方向的两侧。可控限位件设在硅棒运输机构上,可控限位件用于擦拭件擦拭硅棒端面时,限定硅棒运输机构上的硅棒的位置。此时,两个擦拭件可以同时对位于硅棒运输机构上的硅棒的两个端面进行擦拭,从而可以提高工作效率。可控限位件可以限
定正在擦拭的硅棒的位置,便于擦拭装置进行擦拭。
20.在一些实现方式中,上述可控限位件为可控挡块。
附图说明
21.此处所说明的附图用来提供对本实用新型的进一步理解,构成本实用新型的一部分,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
22.图1为本实用新型实施例的硅棒端面的擦拭件及驱动件的结构示意图一;
23.图2为本实用新型实施例的硅棒端面的擦拭件及驱动件的结构示意图二;
24.图3为本实用新型实施例的硅棒承载机构的结构示意图;
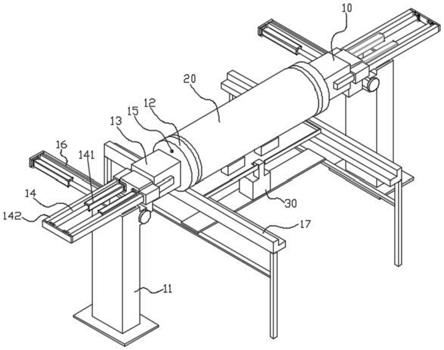
25.图4为本实用新型实施例的硅棒处理系统的结构示意图;
26.图5为本实用新型实施例的硅棒处理系统擦拭硅棒的状态示意图。
27.图1~图5中,10-擦拭装置,11-支架,12-擦拭件,120-擦拭面,13-驱动件,14-第一移动机构,141-伸缩杆,142-移动杆,143-连接块,15-移动控制开关,16-第二移动机构,17-硅棒承载机构,20-硅棒,30-可控限位件。
具体实施方式
28.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
29.需要说明的是,在附图中示出本实用新型实施例的各种示意图,这些图并非按比例绘制。其中,为了清楚明白的目的,放大了某些细节,并且可能省略了某些细节。图中所示出的各种区域、层的形状以及它们之间的相对大小、位置关系仅是示例性的,实际中可能由于制造公差或技术限制而有所偏差,并且本领域技术人员根据实际所需可以另外设计具有不同形状、大小、相对位置的区域/层。
30.应理解,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者间接在该另一个元件上。当一个元件被称为是“连接于”另一个元件,它可以是直接连接到另一个元件或间接连接至该另一个元件上。
31.此外,术语“上”、“下”、“前”、“后”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
32.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
33.在制作太阳能电池的过程中,拉晶设备生产的硅棒经过切断、刻字、性能检测等工
序,筛选出合格的硅棒。硅棒经过切方、切片后形成制作太阳能电池片的硅片。在硅棒切断的过程中,硅棒端面容易残留较多的硅粉。这些硅粉遇到水分会形成硅泥,附着在硅棒端面。硅棒端面的硅泥不仅会对硅棒的性能检测造成不利影响,而且容易遮挡位于硅棒端面的编码,导致硅棒的编码无法识别,堵塞自动化运输线。
34.为了解决上述技术问题,本实用新型实施例提供一种硅棒端面的擦拭装置10。如图1-图5所示,该硅棒端面的擦拭装置10包括支架11、擦拭件12和驱动件13和硅棒承载机构17。擦拭件12具有平面状的擦拭面120,擦拭件12设在驱动件13的动力输出端。硅棒承载机构17位于擦拭件12具有擦拭面120的一侧。驱动件13设在支架11上;驱动件13用于驱动擦拭件12擦拭硅棒端面。
35.具体实施时,硅棒20位于硅棒承载机构17上,使擦拭件12的擦拭面120与硅棒端面紧密接触。然后,利用驱动件13驱动擦拭件12不断擦拭硅棒端面,完成自动化擦拭硅棒端面的操作。
36.基于上述擦拭装置10的结构可知,硅棒端面的擦拭装置10包括硅棒承载机构17、用于擦拭硅棒端面的擦拭件12和驱动擦拭件12的驱动件13。硅棒承载机构17上承载有硅棒20。擦拭件12具有的擦拭面120为平面状,被切断后的硅棒的端面也为平面状,两者形状相匹配。当擦拭装置10擦拭硅棒端面,擦拭件12的擦拭面120与硅棒承载机构17位置相对应,擦拭件12的擦拭面120与硅棒端面相接触,平面状的擦拭面120与硅棒端面具有较大的接触面积,可以提高擦拭效率,并实现较好的擦拭效果。与此同时,驱动件13可以驱动擦拭件12以较大的接触面和较高的速度擦拭硅棒端面。结合擦拭件12和驱动件13的情况下,可以实现自动化擦拭硅棒端面的操作,提高擦拭硅棒端面的工作效率和擦拭效果。
37.如图3-图5所示,上述硅棒承载机构17可以为硅棒运输机构,也可以为硅棒固定机构。此时,硅棒承载机构17可以用于承载固定硅棒20,也可以用于承载运输硅棒20。无论硅棒20处于运动状态,还是固定状态,均可以对其进行擦拭处理。当硅棒承载机构17为硅棒运输机构时,硅棒承载机构17上的硅棒20可以在运动状态和静止状态之间切换。运动状态时,硅棒运输机构运载硅棒20到设定的目的地。静止状态时,擦拭件12可以方便的对硅棒端面进行擦拭。硅棒20在运动状态和静止状态之间切换,可以有多种方式。例如,硅棒运输机构启动或关闭,可以实现硅棒20状态的切换。当硅棒承载机构17为硅棒固定机构时,该硅棒承载机构17可以为托盘、夹持件等可以承载、固定硅棒20的装置。
38.如图1-图5所示,从结构上来说,上述擦拭件12可以为盘状结构,也可以为板状结构,也可以为条状结构。
39.如图1-图5所示,当擦拭件12为盘状结构时,其擦拭面120为盘状,擦拭面120与圆形硅棒端面的形状匹配度较高,可以以较小的擦拭面120实现对硅棒端面的覆盖。此时,在确保擦拭面120与硅棒端面具有较大接触面积的情况下,可以节省擦拭件12材料。当擦拭件12为板状结构或条状结构,擦拭面120为矩形或长方形。在擦拭硅棒端面的过程中,擦拭件12的棱边可以对硅棒端面起到刮削的作用,从而可以方便的刮除硅棒端面上的硅泥。
40.从尺寸上来说,上述擦拭件12的尺寸可以根据被擦拭的硅棒端面的尺寸进行设计。具体的,擦拭件12的擦拭面120可以完全覆盖硅棒端面,也可以部分覆盖硅棒端面。示例性的,当擦拭件12为盘状结构时,其盘状擦拭面120的直径可以等于或大于硅棒端面。此时,盘状擦拭面120完全覆盖硅棒端面。当擦拭件12为板状结构时,其长方形的擦拭面120的面
积可以小于硅棒端面的面积,也就是说,擦拭面120可以部分覆盖硅棒端面。当然,在实际应用中,盘状擦拭面120也可以部分覆盖硅棒端面,长方形的擦拭面120也可以完全覆盖硅棒端面。
41.从擦拭方式来说,上述擦拭件12可以为旋转擦拭件。当擦拭件12的擦拭面120不小于硅棒端面时,擦拭件12可以以擦拭面120的几何中心为旋转中心,持续自转摩擦硅棒端面。当擦拭件12的擦拭面120小于硅棒端面时,擦拭件12可以沿着设计路线旋转,以擦拭硅棒端面。该设计路线可以为圆形,也可以为螺旋状。
42.上述擦拭件12也可以为往复运动擦拭件。无论何种尺寸、何种形状的擦拭面120,均可以采用往复运动擦拭硅棒端面。该往复运动的路径可以为直线往复路径,也可以为曲线往复路径。旋转擦拭件和往复运动擦拭件,均可以使擦拭件12与硅棒端面之间产生动摩擦力。在动摩擦力的作用下,附着在硅棒端面的硅泥可以被方便的擦去。
43.从材料上来说,上述擦拭件12的材料可以为刚性材料,以确保擦拭动作的稳定性和可靠性。应理解,上述硅棒端面的擦拭装置10还可以包括柔性接触层。柔性接触层设在擦拭件12的擦拭面120上。此时,柔性接触层不仅可以与硅棒端面之间产生较大的摩擦力,而且柔性接触层与硅棒端面接触时,具有缓冲作用,可以减少擦拭件12对硅棒端面的损伤。该柔性接触层可以为一附着在擦拭面120上薄层。柔性接触层可以完全覆盖擦拭面120,也可以部分覆盖擦拭面120。柔性接触层的材料可以为棉质材料、纤维材料等。
44.如图1-图5所示,上述驱动件13的作用主要是为擦拭件12提供动力。此时,驱动件13可以包括电机,也可以包括气缸,也可以包括液压缸。这些驱动件13均可以为擦拭件12提供擦拭动作所需的动力。具体实施时,驱动件13的动力输出端与擦拭件12非擦拭面120的部位动力连接。
45.如图1-图5所示,上述硅棒端面的擦拭装置10还可以包括第一移动机构14。第一移动机构14的固定端设在支架11上,驱动件13设在第一移动机构14的移动端;第一移动机构14用于支持驱动件13沿着第一方向移动。此时,驱动件13通过第一移动机构14可移动的设在支架11上。并且,第一移动机构14的移动端可以带着驱动件13和擦拭件12沿着第一方向移动。从而利用第一移动装置可以实现擦拭件12自动化靠近硅棒端面,自动化远离硅棒端面的操作,进而提高擦拭装置10的自动化程度。
46.在实际应用中,第一移动机构14可以由多种结构。示例性的,如图1-图5所示,第一移动机构14可以包括伸缩杆141和移动杆142,移动杆142的第一端与伸缩杆141的第一端固定连接。伸缩杆141的第二端为第一移动机构14的固定端,设在支架11上。移动杆142的第二端为移动端,驱动件13可以通过连接块143设在移动杆142的第二端。该伸缩杆141可以为液压伸缩杆、气动伸缩杆、电动伸缩杆等。
47.具体实施时,可以使第一方向与硅棒的延伸方向保持一致。利用第一移动机构14使驱动件13和擦拭件12沿着第一方向不断靠近硅棒,直至擦拭面120与硅棒端面接触。然后,驱动件13驱动擦拭件12擦拭硅棒端面。擦拭操作完成后,利用第一移动机构14使驱动件13和擦拭件12沿着第一方向远离硅棒。
48.具体实施时,也可以是第一方向垂直硅棒的延伸方向。第一移动机构14带着驱动件13和擦拭件12沿着垂着硅棒的方向不断靠近硅棒,直至擦拭面120与硅棒端面的接触面积最大。然后,驱动件13驱动擦拭件12擦拭硅棒端面。擦拭操作完成后,利用第一移动机构
14使驱动件13和擦拭件12远离硅棒。
49.如图1-图5所示,上述硅棒端面的擦拭装置10还可以包括移动控制开关15。该移动控制开关15与第一移动机构14电连接。此时,可以通过移动控制开关15控制第一移动机构14的移动,提高其自动化性能。
50.示例性的,移动控制开关15可以为压力开关。压力开关的压力感应触头设在擦拭件12上,压力开关与第一移动机构14电连接。压力感应触头用于检测擦拭面120上承受的来自硅棒端面的压力。此时,可以通过擦拭件12感应到的压力,及时控制第一移动机构14停止,减少第一移动机构14驱动擦拭件12碰撞硅棒端面的几率,减少对硅棒端面的损伤。具体实施时,第一移动机构14带着驱动件13和擦拭件12不断靠近硅棒端面。当压力感应触头受到的压力大于限定值时,压力开关被触发,第一移动机构14停止移动。
51.如图1-图5所示,上述硅棒端面的擦拭装置10还可以包括第二移动机构16。利用第二移动机构16实现擦拭件12在第二方向上的移动。实际应用时,第二移动机构16可以有多种设置方式。例如,第一移动机构14的固定端通过第二移动机构16可移动设置在支架11上,第二移动机构16用于支持第一移动机构14沿着第二方向移动,该第一移动机构14携带驱动件13和擦拭件12。又例如,驱动件13通过第二移动机构16可移动设置在第一移动机构14的移动端,第二移动机构16用于支持驱动件13沿着第二方向移动,该驱动件13携带擦拭件12。此时,第二移动机构16的设置,可以使驱动件13和擦拭件12在第二方向上移动。利用第一移动机构14和第二移动机构16,可以实现驱动件13和擦拭件12在两个方向上自动化靠近硅棒端面,自动化远离硅棒端面。基于此,可以灵活的调控擦拭件12的位置,便于擦拭件12对准硅棒端面。
52.第二移动机构16的结构可以与第一移动机构14的结构相同,包括伸缩杆和移动杆。当然第二移动机构16的结构也可以与第一移动机构14不同。
53.如图1-图5所示,示例性的,第二移动机构16包括伸缩杆和移动杆,移动杆的第一端与伸缩杆的第一端固定连接。伸缩杆的第二端为第二移动机构16的固定端,设在支架11上。移动杆的第二端为移动端,第一移动机构14固定端设在该移动杆的第二端,使得第二移动机构16的移动端能够驱动整个第一移动机构14和驱动件13、擦拭件12移动。
54.如图1-图5所示,上述第一方向与第二方向具有夹角,夹角可以为90
°
。此时,可以在垂直硅棒端面和平行硅棒端面的两个方向上,实现擦拭件12的自动化靠近和自动化远离。其中,在平行硅棒端面的方向上,擦拭件12的自动化靠近硅棒端面,接触硅棒端面,以及远离硅棒端面的过程,可以对硅棒端面起到刮削的作用,便于刮除位于硅棒端面的硅泥。
55.具体实施时,可以使第一方向与硅棒的延伸方向保持一致,第二方向与硅棒端面保持平行。首先,利用第二移动机构16使擦拭面120与硅棒端面对准。第一移动机构14驱动擦拭件12和驱动件13靠近并接触硅棒端面。完成硅棒端面擦拭操作后,第二移动机构16先驱动擦拭件12从硅棒端面的侧面滑出,刮掉硅棒端面的硅泥,然后第一移动机构14驱动擦拭件12远离硅棒。
56.如图1-图5所示,上述支架11主要起到支撑第一移动机构14、第二移动机构16、驱动件13和擦拭件12的作用。该支架11的高度可以根据擦拭时硅棒端面的高度来确定。为了确保支撑稳定性和可靠性,支架11可以包括主杆和底板。底板可以固定于地面、工作台等工作面上。主杆固定于底板上,并且与工作面接触的底板的表面积,大于与接触底板接触的主
杆的表面积。这样可以提高主杆的稳定性和可靠性。
57.如图4-图5所示,本实用新型实施例还提供一种硅棒处理系统。该硅棒处理系统包括至少一个上述的硅棒端面的擦拭装置10。在实际应用中,硅棒端面的擦拭装置10可以有一个,也可以有多个。该硅棒处理系统的有益效果,可以参考上述的硅棒端面的擦拭装置10的有益效果,在此不做赘述。
58.如图4-图5所示,上述硅棒承载机构17为硅棒运输机构,用于将硅棒20运输至擦拭件12具有擦拭面120的一侧。硅棒处理系统还可以包括可控限位件30。图4示出硅棒处理系统的结构示意图,图5示出硅棒处理系统擦拭硅棒端面的示意图。擦拭件12有两个,分别位于硅棒运输机构的运输方向的两侧。可控限位件30设在硅棒运输机构上,可控限位件30用于擦拭件12擦拭硅棒端面时,限定硅棒运输机构上的硅棒20的位置。具体的,可控限位件30可以为可控挡块。此时,两个擦拭件可以同时对位于硅棒运输机构上的硅棒20的两个端面进行擦拭,从而可以提高工作效率。可控限位件30可以限定正在擦拭的硅棒20的位置,便于擦拭装置10进行擦拭。
59.具体实施时,当硅棒运输机构上的硅棒20流转至擦拭件12位置处时,被可控挡块挡住,硅棒20停止前进。擦拭件12对硅棒20的两个端面进行擦拭。擦拭完成后,可控挡块下降,硅棒20继续流转至下一工序。随后,可控挡块升起挡住下一个硅棒20,继续进行硅棒端面的擦拭。
60.以上所述,仅为本实用新型的具体实施方式或对具体实施方式的说明,本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本实用新型的保护范围之内。本实用新型的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1