一种光电传感器自清洁装置的制作方法
1.本技术涉及无人值守自动洗车机技术领域,尤其涉及一种光电传感器自清洁装置。
背景技术:
2.光电传感器是将光信号转换为电信号的一种器件,主要由发送器、接收器和检测电路组成。
3.无人值守自动洗车机在机器前段通常会装有2对光电传感器用于检测车辆前段及尾端。一般无人值守自动洗车机采用对射式光电传感器。在实际应用中,光电传感器由于周围环境中会有粉尘、灰尘及洗车油污残余物等污渍,这些污渍会附着在光电传感器的光电探头上,长期得不到清理将会严重影响光电传感器的光电探头的探测精度,从而影响设备可靠性。传统的处理方法是,维护人员需定期清洁光电传感器表面污渍,大大增加了人工清洁的难度与劳动强度,无法实现洗车机自动化要求。
4.因此,提供一种光电传感器自清洁装置,是目前需要解决的主要问题。
技术实现要素:
5.本技术提供了一种光电传感器自清洁装置,可以实现无人值守自动洗车机的光电传感器自动清洁,从而有效降低人工清洁频次及劳动强度。
6.本技术采用的技术方案如下:
7.本实用新型提供了一种光电传感器自清洁装置,用于无人值守自动洗车机,其特征在于,包括光电传感器、摆动气缸、毛刷机构和电磁阀;
8.所述毛刷机构包括连接杆和毛刷,所述连接杆一端与所述摆动气缸的活塞杆连接,另一端与所述光电传感器的端部表面相接触,所述光电传感器和所述摆动气缸平行设置;
9.所述电磁阀用于控制摆动气缸开启,从而摆动气缸带动毛刷机构活动。
10.进一步地,所述摆动气缸的活塞杆转动范围为0~90
°
。
11.进一步地,所述摆动气缸上连接有两个气管接头。
12.进一步地,还包括固定板,所述固定板包括第一连接部、固定部和第二连接部;
13.所述固定部呈u形,所述固定部的底部具有第一放置孔和第二放置孔,所述光电传感器和所述摆动气缸分别位于所述第一放置孔和第二放置孔内;
14.所述第一连接部连接在所述固定部的一端,所述第二连接部连接在所述固定部的另一端,且所述第一连接部和第二连接部均朝远离所述固定部的方向设置。
15.进一步地,所述第一连接部和所述第二连接部上均具有连接孔。
16.采用本技术的技术方案的有益效果如下:
17.本实用新型的一种光电传感器自清洁装置,用于无人值守自动洗车机,包括光电传感器、摆动气缸、毛刷机构和电磁阀;毛刷机构包括连接杆和毛刷,连接杆一端与摆动气
缸的活塞杆连接,另一端与广电传感器的端部表面相接触,光电传感器和摆动气缸平行设置;电磁阀用于控制摆动气缸开启,从而摆动气缸带动毛刷机构活动。
18.本实用新型使用时,控制器控制无人值守自动洗车机启动设备后,控制器给电磁阀信号,电磁阀吸合,摆动气缸摆动,同时带动摆动毛刷对光电传感器表面进行清洁擦拭。
19.本实用新型结构简单、使用方便、清洁彻底以及便于推广使用。
附图说明
20.为了更清楚地说明本技术的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
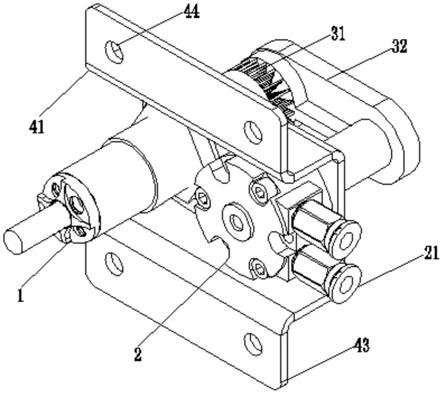
21.图1为本实用新型一实施例的一种光电传感器自清洁装置的第一视角的结构示意图;
22.图2为本实用新型一实施例的一种光电传感器自清洁装置的第二视角的结构示意图;
23.图示说明:
24.其中,1
‑
光电传感器;
[0025]2‑
摆动气缸;21
‑
气管接头;
[0026]3‑
毛刷机构;31
‑
毛刷;32
‑
连接杆;
[0027]4‑
固定板;41
‑
第一连接部;42
‑
固定部;43
‑
第二连接部;44
‑
连接孔。
具体实施方式
[0028]
下面将详细地对实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下实施例中描述的实施方式并不代表与本技术相一致的所有实施方式。仅是与权利要求书中所详述的、本技术的一些方面相一致的系统和方法的示例。
[0029]
参见图1和图2。
[0030]
本技术提供的一种光电传感器自清洁装置,用于无人值守自动洗车机,包括光电传感器1、摆动气缸2、毛刷机构3和电磁阀。
[0031]
具体来说,毛刷机构3包括连接杆32和毛刷31,所述连接杆32一端与所述摆动气缸2的活塞杆连接,另一端与所述光电传感器1的端部的光电探头相接触,所述光电传感器1和所述摆动气缸2平行设置;电磁阀用于控制摆动气缸开启,从而摆动气缸2带动毛刷机构活动。
[0032]
其中,在本实施例中,所述连接杆32一端具有连接筒,连接筒内具有内螺纹,摆动气缸2的活塞杆上具有外螺纹,摆动气缸2的活塞杆可活动的螺纹设置在上述连接筒上。
[0033]
摆动气缸2的活塞杆转动范围为0~90
°
。其中,在本实施例中,摆动气缸2的活塞杆转动范围为90
°
。
[0034]
摆动气缸2上连接有两个气管接头21。气管接头21用于给摆动气缸2通气。
[0035]
本实施例的一种光电传感器1自清洁装置还包括固定板4,所述固定板4包括第一连接部41、固定部42和第二连接部43;所述固定部42呈u形,所述固定部42的底部具有第一
放置孔和第二放置孔,所述光电传感器1和所述摆动气缸2分别位于所述第一放置孔和第二放置孔内;所述第一连接部41连接在所述固定部42的一端,所述第二连接部43连接在所述固定部42的另一端,且所述第一连接部41和第二连接部43均朝远离所述固定部42的方向设置。
[0036]
其中,第一放置孔具有内螺纹,光电传感器表面有外螺纹,调节螺纹可以调整毛刷与光电传感器接触距离。
[0037]
第一连接部41和所述第二连接部43上均具有连接孔44。具体地,本实施例的第一连接部41和所述第二连接部43上均具有两个连接孔44。
[0038]
固定板4整体用于将光电传感器1和摆动气缸2固定在无人值守自动洗车机上,第一连接部41和所述第二连接部43上的连接孔44用于与无人值守自动洗车机相固定。
[0039]
其中,在本实施例中,所述毛刷31呈圆形。当然,毛刷31也可以设计为其他可行的形状,只要能对光电传感器1的端部的光电探头起到清洁作用均可,在此不多做赘述。
[0040]
本实施例使用时,控制器控制无人值守自动洗车机启动设备后,控制器给电磁阀信号,电磁阀吸合,摆动气缸2进行90度摆动,同时带动摆动毛刷31对光电传感器1表面进行清洁擦拭。控制电磁阀即可实现对光电传感器1的表面清洁。本实用新型结构简单、使用方便、清洁彻底以及便于推广使用。
[0041]
本实用新型的优点为:
[0042]
1.摆动气缸2可进行90度摆动,带动摆动毛刷31转动,使得摆动毛刷31对光电传感器1清洁彻底。
[0043]
2.摆动气缸2通过电磁阀控制,便于实现自动清洁功能。
[0044]
3.采用可调节长度光电传感器1便于控制摆动毛刷31与光电传感器1表面接触距离,提高清洁程度。
[0045]
本技术提供的实施例之间的相似部分相互参见即可,以上提供的具体实施方式只是本技术总的构思下的几个示例,并不构成本技术保护范围的限定。对于本领域的技术人员而言,在不付出创造性劳动的前提下依据本技术方案所扩展出的任何其他实施方式都属于本技术的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1