食材清洗机的制作方法
1.本公开涉及食材清洗技术领域,具体涉及一种食材清洗机。
背景技术:
2.现有市面上具有自动排水功能的洗菜机都需要配置排水电磁阀,结构复杂、成本较高。
技术实现要素:
3.本公开提供一种食材清洗机,包括壳体、电解发生器和虹吸组件,所述壳体包括容腔,所述电解发生器设置在所述容腔内,所述虹吸组件设置在所述容腔的底壁,所述容腔内盛放的清洗液的液面高度小于预设液面高度时,所述虹吸组件保持所述清洗液的液面高度,所述容腔内的清洗液的液面高度大于等于所述预设液面高度时,所述虹吸组件将所述清洗液排出。
4.通过设置虹吸组件,利用虹吸效应的作用,在清洗液的液面高度低于预设液面高度时清洗液不会排出,可以在容腔内清洗食材,清洗完成后,再次注入清洗液,使得清洗液的液面高度大于等于预设液面高度,清洗液在虹吸组件的虹吸效应作用下排出,实现自动排水,整个过程只需控制进水的量,无需设置控制出水的电磁阀,结构简单,成本低。
5.可选的,所述虹吸组件包括中空管和分隔件,所述中空管的第一端开口,与所述第一端相背的第二端封闭,所述中空管围合一管腔,所述第一端与所述容腔的底壁连接,所述分隔件容置在所述管腔,且所述分隔件与所述容腔的底壁连接,所述分隔件将所述管腔分隔为第一流道和第二流道,所述第一流道和所述第二流道在所述第二端连通,所述中空管还开设有进液口,所述容腔的底壁开设有排液口,所述进液口连通所述容腔和所述第一流道,所述排液口连通所述第二流道和所述壳体的外部;所述预设液面高度为所述分隔件相对所述容腔的底壁的高度。通过设置中空管和分隔件的结构,并开设进液口,形成从容腔到壳体的外部由进液口、第一流道、第二流道、排液口的清洗液流动路径,结构简单,成本低。可对现有的食材清洗机进行简单改造,新增一虹吸组件即可。
6.可选的,所述中空管和所述分隔件均沿直线延伸,且所述中空管和所述分隔件均垂直于所述容腔的底壁。如此,虹吸组件的结构简单,容易制造,也使得容腔的空间较为规整,便于清洗食材。
7.可选的,所述食材清洗机还包括排液管,所述排液管与所述排液口连通。设置排液管,可将清洗液排到指定的如下水道口等位置,能更灵活的布置食材清洗机,避免环境污染。
8.可选的,所述食材清洗机包括多个垫脚,所述排液管呈弯折状,且容置于多个所述垫脚之间的空间内。设置垫脚一方面能将底壁垫高,能方便食材清洗机的搬运,另一方面,可隐藏排液管,使得食材清洗机具有更紧凑的外观。
9.可选的,所述食材清洗机还包括液泵和进液管,所述液泵设置在所述壳体的侧壁,
所述进液管与所述液泵连接,所述液泵用于向所述容腔泵送清洗液。设置液泵和进液管,可实现向容腔注入清洗液,可控制液泵实现自动进液功能。
10.可选的,所述壳体的侧壁上设有支撑件,所述液泵设置在所述支撑件上。由于壳体的侧板通常较薄,设置支撑件可使得液泵具有良好的支撑。
11.可选的,所述食材清洗机还包括控制件和电磁阀,所述电磁阀设置在所述液泵上,所述控制件与所述电磁阀电连接,所述控制件根据所述容腔的清洗液的液面高度与所述预设液面高度的关系控制所述电磁阀的开关,所述电磁阀用于控制所述液泵是否泵送清洗液。通过设置一个控制进液的电磁阀,配合虹吸组件,即可实现对进液和排液的自动控制,无需如现有的食材清洗机中,必须要设置控制进液和控制排液的两个电磁阀才能实现进液和排液的自动控制,节约了一个电磁阀,简化了结构,降低了成本。
12.可选的,所述壳体的侧壁上设有最高液面位置刻度线,所述最高液面位置刻度线与所述预设液面高度相等。设置最高液面位置刻度线,可直观方便的观察清洗液的液面高度,便于实现自动控制。
13.可选的,所述食材清洗机还包括液面高度检测件,所述液面高度检测件与所述控制件电连接,所述液面高度检测件用于检测容腔的清洗液的实时液面高度,并传输实时液面高度的电信号至所述控制件,所述控制件根据所述实时液面高度与所述预设液面高度的差值对所述电磁阀进行控制。液面高度检测件检测的实时的液面高度,与预存储的预设液面高度进行对比,即可实现更为精确的自动控制。当食材清洗机工作时,可更为精确的控制清洗液的量,保证食材能够得到充分的清洗,当食材清洗机工作完毕后,又可精确控制新注入的清洗液的量,能够触发虹吸效应,避免清洗液的浪费。
附图说明
14.为了更清楚地说明本公开实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本公开的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
15.图1是一种实施例的食材清洗机的立体结构示意图。
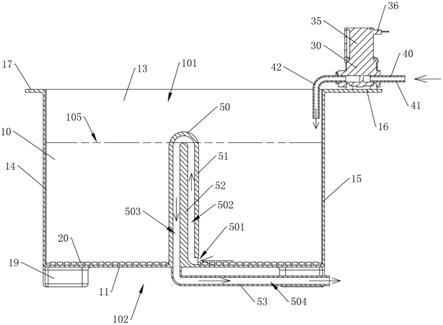
16.图2是一种实施例的食材清洗机的剖视的结构示意图。
17.图3是一种实施例的食材清洗机另一视角的剖视结构示意图。
18.附图标记说明:
19.10
‑
壳体,11
‑
底板,12
‑
第一侧板,13
‑
第二侧板,14
‑
第三侧板,15
‑
第四侧板,16
‑
支撑件,17
‑
耳板,18
‑
开机按键,19
‑
垫脚,101
‑
容腔,102
‑
凹槽,105
‑
预设液面高度;
20.20
‑
电解发生器;
21.30
‑
液泵,35
‑
电磁阀,36
‑
接线端子;
22.40
‑
进液管,41
‑
第一段,42
‑
第二段;
23.50
‑
虹吸组件,51
‑
中空管,52
‑
分隔件,53
‑
排液管,501
‑
进液口,502
‑
第一流道,503
‑
第二流道,504
‑
第三流道。
具体实施方式
24.下面将结合本公开实施方式中的附图,对本公开实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式仅仅是本公开一部分实施方式,而不是全部的实施方式。基于本公开中的实施方式,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施方式,都属于本公开保护的范围。
25.请一并参阅图1至图3,本公开实施例提供一种食材清洗机,包括壳体10、电解发生器20和虹吸组件50。
26.壳体10为一端具有开口而其他端封闭的结构。可选的,壳体10呈长方体的形状,包括相对的第一侧板12和第二侧板13,相对的第三侧板14和第四侧板15,以及连接第一侧板12至第四侧板15的底板11。第一侧板12至第四侧板15和底板11共同围合一容腔101。可选的,壳体10与底板11相对的一端开口,使得容腔101露出。可选的,壳体10的开口处可通过壳体10盖子盖住,在食材清洗机放入和取出食材时,壳体10盖子打开,在其他状态时,壳体10盖子可盖住开口。第一侧板12至第四侧板15和底板11的一侧表面构成容腔101的内壁,具体为第一侧板12和第二侧板13相对的表面,以及第三侧板14和第四侧板15相对的表面构成容腔101的侧壁,底板11朝向壳体10的开口的表面构成容腔101的底壁。第一侧板12至第四侧板15和底板11均可为平板,也可为局部弯曲的弯板,如第一侧板12和第三侧板14及第四侧板15连接处设置为圆滑弯曲过渡的形状。底板11亦可设置为中部朝向壳体10的开口一侧弯曲的结构,使得壳体10的底部形成一凹槽102,该凹槽102可用于搬运。其他可选的,壳体10还可呈其他形状,如球形、其他多面体等。可选的,在容腔101的底部开一排液口用于排出清洗液。壳体10上还可设开机按键18,开机按键18用于控制食材清洗机开机和关机。
27.电解发生器20设置在容腔101内。可选的,电解发生器20设置在容腔101的底壁,即电解发生器20设置在底板11上,电解发生器20可包括若干条状的电解棒,该若干电解棒可等间距的设置在底板11上。电解发生器20可包括连接接口(图中未示出),连接接口用于与电源连接,以使电解发生器20通电而产生电解反应。其他可选的,电解发生器20也可设置在容腔101的侧壁,即电解发生器20设置在第一侧板12至第四侧板15的任一侧板上。
28.虹吸组件50设置在容腔101的底壁,虹吸组件50用于产生虹吸效应,在满足某种条件时自动将容腔101内的清洗液排出。
29.具体的,容腔101内盛放的清洗液的液面高度小于预设液面高度105时,虹吸组件50保持清洗液的液面高度,容腔101内的清洗液的液面高度大于等于预设液面高度105时,虹吸组件50将清洗液排出。
30.清洗液可为水、有机溶剂等,清洗液用于清洗食材,食材具体可以为蔬菜、瓜果、肉等。
31.食材清洗机工作时,打开壳体10的开口,将食材放入容腔101,根据清洗的食材的量,在容腔101中注入适量的清洗液,且清洗液的液面高度必须低于预设液面高度105,本实施例中的清洗液以水为例,电解发生器20电解清洗液以分解出具有强氧化性的羟基粒子,羟基离子再作用于食材表面的农药、细菌、激素等,使其降解失活。其中,注入清洗液的方法可采用自动或手动的方式,原则上可采用任意可行的方式,后续实施例中也有一些说明。
32.食材清洗机工作完成后,将食材从容腔101中捞出,然后再次注入清洗液(或水),使得清洗液的液面高度大于等于预设液面高度105,清洗液在虹吸效应的作用下从虹吸组
件50排出,完成食材清洗机的自动排水。
33.本公开通过设置虹吸组件50,利用虹吸效应的作用,在清洗液的液面高度低于预设液面高度105时清洗液不会排出,可以在容腔101内清洗食材,清洗完成后,再次注入清洗液,使得清洗液的液面高度大于等于预设液面高度105,清洗液在虹吸组件50的虹吸效应作用下排出,实现自动排水,整个过程只需控制进水的量,无需设置控制出水的电磁阀35,结构简单,成本低。
34.可行的,请参考图2和图3,虹吸组件50包括中空管51和分隔件52。中空管51的第一端开口,与第一端相背的第二端封闭,中空管51围合一管腔,第一端与容腔101的底壁连接。分隔件52容置在管腔,且分隔件52与容腔101的底壁连接。分隔件52将管腔分隔为第一流道502和第二流道503,第一流道502和第二流道503在第二端连通,中空管51还开设有进液口501,进液口501连通容腔101和第一流道502,容腔101的底壁的排液口连通第二流道503和壳体10的外部。预设液面高度105为分隔件52相对容腔101的底壁的高度。
35.中空管51的横截面可为圆形,第二端的端部可为半球形,使得中空管51的结构较为圆滑,不易在放入食材和捞出食材时与人手磕碰造成受伤,也可使得食材在容腔101内不易磕碰损坏。进液口501设置在中空管51的第一端的外周,进液口501可与容腔101的底壁连接,如此在排出清洗液时,能将容腔101内的清洗液排净。
36.分隔件52可呈板状,可连接在中空管51的直径上,分隔件52的顶端(即靠近中空管51的第二端的一端)的端部可作圆滑处理,使得第一流道502和第二流道503的尺寸大致相同,便于清洗液以较为均匀一致的流速流动。
37.通过设置中空管51和分隔件52的结构,并开设进液口501,形成从容腔101到壳体10的外部由进液口501、第一流道502、第二流道503、排液口的清洗液流动路径,结构简单,成本低。可对现有的食材清洗机进行简单改造,新增一虹吸组件50即可。
38.可选的,中空管51和分隔件52均沿直线延伸,且中空管51和分隔件52均垂直于容腔101的底壁。如此,虹吸组件50的结构简单,容易制造,也使得容腔101的空间较为规整,便于清洗食材。
39.可选的,请参考图2和图3,食材清洗机还包括排液管53,排液管53与排液口连通。排液管53具有第三流道504,第三流道504与排液口连通,使得第二流道503和第三流道504连通。排液管53可为软管。设置排液管53,可将清洗液排到指定的如下水道口等位置,能更灵活的布置食材清洗机,避免环境污染。
40.可选的,食材清洗机包括多个垫脚19,多个垫脚19将容腔101的底壁垫高,排液管53呈弯折状,且容置于多个垫脚19之间的空间内。可选的,如前述说明,垫脚19由底板11弯曲而成。可选的,也可在底板11处连接支撑结构形成垫脚19。设置垫脚19一方面能将底壁垫高,能方便食材清洗机的搬运,另一方面,可隐藏排液管53,使得食材清洗机具有更紧凑的外观。
41.可选的,请参考图1至图3,食材清洗机还包括液泵30和进液管40,液泵30设置在壳体10的侧壁,进液管40与液泵30连接,液泵30用于向容腔101泵送清洗液。进液管40可包括两段,第一段41与液泵30的入口连通,第二段42与液泵30的出口连通,第一段41可与储液桶、自来水管等连通,用于向液泵30输送清洗液,第二段42可呈弯折状,用于将液泵30输送的清洗液注入容腔101。设置液泵30和进液管40,可实现向容腔101注入清洗液,可控制液泵
30实现自动进液功能。
42.可选的,请参考图1至图3,壳体10的侧壁上设有支撑件16,液泵30设置在支撑件16上。由于壳体10的侧板通常较薄,设置支撑件16可使得液泵30具有良好的支撑。支撑件16可设置在壳体10的开口处的侧壁上,即设置在第一侧板12至第四侧板15的任一侧板上。支撑件16可与壳体10为一体式结构。在于支撑件16相对的壳体10的侧壁上还可设耳板17,可通过支撑件16和耳板17搬运食材清洗机。
43.可选的,请参考图1至图3,食材清洗机还包括控制件(图中未示出)和电磁阀35,电磁阀35设置在液泵30上,控制件与电磁阀35电连接,控制件根据容腔101的清洗液的液面高度与预设液面高度105的关系控制电磁阀35的开关,电磁阀35用于控制液泵30是否泵送清洗液。
44.具体的,电磁阀35包括接线端子36,接线端子36用于与控制件电连接。当食材清洗机工作时,控制件先控制电磁阀35打开,电磁阀35控制液泵30向容腔101泵送清洗液,当清洗液的液面高度低于且接近预设液面高度105时,控制件控制电磁阀35关闭,以使液泵30停止泵送清洗液,以维持清洗液的液面高度,进行食材清洗。当食材清洗机工作完毕,控制件控制电磁阀35再次打开,电磁阀35控制液泵30向容腔101继续泵送清洗液,直至清洗液的液面高度等于或高于预设液面高度105后停止注入清洗液。清洗液在虹吸组件50的虹吸效应下从容腔101排出。
45.因此,通过设置一个控制进液的电磁阀35,配合虹吸组件50,即可实现对进液和排液的自动控制,无需如现有的食材清洗机中,必须要设置控制进液和控制排液的两个电磁阀35才能实现进液和排液的自动控制,节约了一个电磁阀35,简化了结构,降低了成本。
46.可选的,请参考图1至图3,壳体10的侧壁上设有最高液面位置刻度线,最高液面位置刻度线与预设液面高度105相等。
47.设置最高液面位置刻度线,可直观方便的观察清洗液的液面高度,便于实现自动控制。
48.请参考图1至图3,食材清洗机还包括液面高度检测件(图中未示出),液面高度检测件与控制件电连接,液面高度检测件用于检测容腔101的清洗液的实时液面高度,并传输实时液面高度的电信号至控制件,控制件根据实时液面高度与预设液面高度105的差值对电磁阀35进行控制。
49.具体的,液面高度检测件可为漂浮式传感器、液面高度传感器等,预设液面高度105可预存储在控制件内,液面高度检测件检测的实时的液面高度,与预存储的预设液面高度105进行对比,即可实现更为精确的自动控制。当食材清洗机工作时,可更为精确的控制清洗液的量,保证食材能够得到充分的清洗,当食材清洗机工作完毕后,又可精确控制新注入的清洗液的量,能够触发虹吸效应,避免清洗液的浪费。
50.以上所揭露的仅为本公开一种较佳实施例而已,当然不能以此来限定本公开之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本公开权利要求所作的等同变化,仍属于本公开所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1