自动清洁系统的制作方法
1.本技术涉及电子产品测试技术领域,特别是涉及一种自动清洁系统。
背景技术:
2.针对手机等智能终端的电池产品,需要对电池的连接件进行检测,检测内容包括电流、电压、阻抗、低电平、温度等,以确保电池能通过连接件可靠供电,以及,不会对电池容量造成过度衰减。
3.目前,通常采用自动化设备中的视觉引导组件将电池压入专用治具,再将该治具搬运到检测设备上进行测试。治具的型腔内有电路针脚,型腔内的电路针脚与连接件的电路针脚紧密接触。在测试过程中经常因为型腔内的电路针脚的清洁程度不够,例如,存在积灰、金属碎屑等物质,从而影响电池的压接成功率和检测良品率。
4.传统技术中,针对上述情况,通常通过人工将未通过测试的电池及搭载该电池的治具从流水线取出,并使用毛刷对治具型腔进行清洁后再投入使用,存在清洁效率低的问题。
技术实现要素:
5.基于此,有必要针对上述技术问题,提供一种能够治具清洁效率的自动清洁系统。
6.一种自动清洁系统,包括:
7.感应组件;
8.控制组件,与所述感应组件连接,所述控制组件根据所述感应组件发送的输送带上治具的到达信号,控制所述输送带停止;
9.信息交互组件,与所述控制组件连接,在确定所述治具需要清洁后,向所述控制组件发出清洁信号;
10.抓取机构,与所述控制组件连接,在所述控制组件的驱动下将所述治具移动至清洁平台;
11.所述清洁平台,与所述控制组件连接,在所述控制组件的驱动下对所述治具进行清洁。
12.在其中一个实施例中,所述信息交互组件,包括:
13.扫描装置;
14.上位机,与所述扫描装置连接,接收所述扫描装置发送的针对所述治具的扫描信息,根据所述扫描信息确定所述治具需要清洁后,向所述控制组件发送所述清洁信号。
15.在其中一个实施例中,所述控制组件,包括:
16.处理模块,基于所述清洁信号驱动电磁阀工作,所述电磁阀控制所述抓取机构抓取所述治具;
17.运动控制模块,与所述处理模块连接,在所述处理模块的驱动下控制所述抓取机构将所述治具从所述输送带移动至所述清洁平台。
18.在其中一个实施例中,所述抓取机构,包括:
19.夹持结构,在所述电磁阀的驱动下夹持所述治具;
20.第一驱动电机,与所述夹爪和所述运动控制模块连接,在所述运动控制模块的驱动下带动所述夹爪移动至所述清洁平台。
21.在其中一个实施例中,所述清洁平台,包括:
22.毛刷;
23.第二驱动电机,与所述毛刷连接,在所述控制组件的驱动下带动所述毛刷对所述治具进行清洁。
24.在其中一个实施例中,所述清洁平台,还包括:
25.护罩;
26.第三驱动电机,与所述护罩连接,在所述控制组件的驱动下关闭或者打开所述护罩。
27.在其中一个实施例中,所述清洁平台,还包括:
28.定位装置,在所述控制组件的驱动下对所述治具进行定位。
29.在其中一个实施例中,所述清洁平台,还包括:
30.吹气阀、排气阀、静电消除器中的至少一个;
31.所述吹气阀在所述控制组件的驱动下进行吹气工作;
32.所述排气阀在所述控制组件的驱动下进行排气工作;
33.所述静电消除器在所述控制组件的驱动下进行静电消除工作。
34.在其中一个实施例中,所述清洁平台还包括灰尘收集袋。
35.在其中一个实施例中,所述清洁平台,在所述控制组件的驱动下停止清洁工作;
36.所述抓取机构,在所述控制组件的驱动下将所述治具从所述清洁平台移动至所述输送带。
37.通过在传输治具的输送带上设置上述自动清洁系统,当自动清洁系统中的控制组件接收到感应组件发送的治具的到达信号,控制输送带停止。当信息交互组件在确定治具需要清洁后,向控制组件发出清洁信号,通过控制组件驱动抓取机构将治具移动至清洁平台,驱动清洁平台对治具进行清洁,从而可以实现直接从输送带上抓取需要清洁的治具,并自动将需要清洁的治具传输至清洁平台进行自动清洁,整个过程不再需要作业人员手动操作,极大地提高了对治具的清洁效率,提高了设备的自动化程度。
附图说明
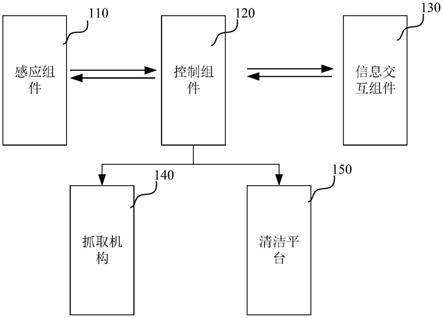
38.图1为一个实施例中自动清洁系统的结构框图;
39.图2为一个实施例中自动清洁系统的结构框图;
40.图3为一个实施例中使用自动清洁系统前后的效果对比图;
41.图4为又一个实施例中使用自动清洁系统前后的效果对比图。
具体实施方式
42.为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本技术,并不
用于限定本技术。
43.除非另有定义,本文所使用的所有的技术和科学术语与属于本技术的技术领域的技术人员通常理解的含义相同。本文中在本技术的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本技术。
44.可以理解,当元件被称为“设置于”或者“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
45.可以理解,本技术所使用的术语“第一”、“第二”等可在本文中用于描述各种元件,但这些元件不受这些术语限制。这些术语仅用于将第一个元件与另一个元件区分。举例来说,在不脱离本技术的范围的情况下,可以将第一电阻称为第二电阻,且类似地,可将第二电阻称为第一电阻。第一电阻和第二电阻两者都是电阻,但其不是同一电阻。
46.可以理解,以下实施例中的“连接”,如果被连接的电路、模块、单元等相互之间具有电信号或数据的传递,则应理解为“电连接”、“通信连接”等。
47.在此使用时,单数形式的“一”、“一个”和“所述/该”也可以包括复数形式,除非上下文清楚指出另外的方式。还应当理解的是,术语“包括/包含”或“具有”等指定所陈述的特征、整体、步骤、操作、组件、部分或它们的组合的存在,但是不排除存在或添加一个或更多个其他特征、整体、步骤、操作、组件、部分或它们的组合的可能性。同时,在本说明书中使用的术语“和/或”包括相关所列项目的任何及所有组合。
48.图1示例性示出了本技术中自动清洁系统的结构示意图。自动清洁系统可以设置于运输治具的输送带上,用于支持电池产品的批量化测试。输送带可以是治具回流线。如图1所示,自动清洁系统包括:感应组件110、控制组件120、信息交互组件130、抓取机构140、清洁平台150。
49.其中,感应组件110可以用于检测当前输送带上是否存在治具。感应组件110可以设置于输送带的固定位置处,例如,输送带的上方、侧面等。感应组件110可以通过一种硬件或者多种硬件组合的方式实现,例如,使用红外传感器、超声波传感器、激光雷达、图像采集装置等中的一种或者多种组合实现。
50.控制组件120与感应组件110电连接,装载对各个组件、输送带等进行控制的相关程序指令。
51.信息交互组件130与控制组件120电连接,装载有对当前到达的治具进行检测,以判断当前到达的治具是否需要清洁的相关逻辑。信息交互组件130可以通过视觉检测系统、扫描装置结合上位机等方式实现。
52.抓取机构140与控制组件120连接,可以但不限于包括夹持结构、驱动电机等部件。夹持结构用于抓取或者放置治具,可以为机械手、夹爪等。驱动电机用于带动抓取结构进行上、下、左、右、旋转等运动,可以为伺服电机、步进电机等。
53.清洁平台150与控制组件120电连接,为清洁工作的主要作业区。清洁平台150中包括至少一个用于清洁治具的组件,例如,毛刷、吹气阀等。这些组件在控制组件120的驱动下自动化地执行清洁工作。
54.此外,自动清洁系统还可以包括通信组件、电源组件、显示组件等。其中,通信组件
与控制组件120电连接,用于向外部设备发送消息,例如,向外部设备发送当前工作进度。电源组件与控制组件120、信息交互组件130、抓取机构140、清洁平台150等连接,用于为各个组件提供电能。显示组件用于显示当前工作进度、当前输送带上治具的相关信息(例如,治具的已使用时长、使用次数、唯一性治具标识等)。
55.具体地,在输送带运输治具的工作过程中,当感应组件110检测到有治具到达时,向控制组件120发送治具的到达信号。控制组件120接收该到达信号,控制输送带停止工作。每个治具上预先设置有与每个治具对应的标签。标签中可以但不限于包含唯一性的治具标识、治具投入使用时刻等信息,这些信息可以以图像、文字、二维码等形式设置于标签上。信息交互组件130对当前到达的治具的标签进行识别,得到该治具的治具信息。当信息交互组件130根据该治具信息判断该治具需要清洁时,向控制组件120发送清洁信号。例如,治具信息为治具投入使用时刻,若根据当前时刻和投入使用时刻计算得到治具的已投入使用时长超过预设时长阈值,则判断该治具需要清洁。
56.控制组件120在接收到清洁信号后,向抓取机构140发送第一抓取信号,抓取机构140在接收到第一抓取信号后,抓取并将治具从输送带运输至清洁平台150。控制组件120向清洁平台150发送开始清洁信号,清洁平台150在接收到开始清洁信号后,对治具进行清洁。
57.进一步地,当信息交互组件130根据治具信息判断治具不需要清洁时,向控制组件120发送无需清洁信号。控制组件120在接收到无需清洁信号后,控制输送带继续进行工作,使治具投入产线使用。
58.进一步地,在信息交互组件130根据治具信息判断治具需要清洁的情况下,当感应组件110检测到治具从输送带离开后,向控制组件120发送当前输送带不存在治具的信号,以使控制组件120在接收到该信号后,控制输送带继续工作,并依次对后续治具自动执行清洁工作。
59.上述自动清洁系统,通过在传输治具的输送带上设置上述自动清洁系统,当自动清洁系统中的控制组件接收到感应组件发送的治具的到达信号,控制输送带停止。当信息交互组件在确定治具需要清洁后,向控制组件发出清洁信号,通过控制组件驱动抓取机构将治具移动至清洁平台,驱动清洁平台对治具进行清洁,从而可以实现直接从输送带上抓取需要清洁的治具,并自动将需要清洁的治具传输至清洁平台进行自动清洁,整个过程不再需要作业人员手动操作,极大地提高了对治具的清洁效率,提高了设备的自动化程度。
60.在一个实施例中,当控制组件监测到清洁平台对治具的清洁时长已到达预设清洁时长,向清洁平台发送停止清洁信号,以使清洁平台停止清洁工作。控制组件向抓取机构发送第二抓取信号。抓取机构在接收第二抓取信号后,将治具从清洁平台运输至输送带上。
61.进一步地,在抓取机构移动治具的过程中,控制组件还可以根据感应组件发送的信号,控制抓取机构在当前输送带没有治具的情况下,再将治具放置于输送带上。具体实现中,首先,控制组件向抓取机构发送第二抓取信号,以控制抓取机构将治具清洁平台上移动至中间位置,中间位置可以是还未到达输送带前的任意位置,例如,输送带的正上方预设距离处。然后,控制组件根据感应组件发送的信号判断当前输送带是否存在治具。若判断当前输送带上不存在治具,则控制组件控制输送带停止工作,并向抓取机构发送第三抓取信号,以使抓取机构将治具放置于输送带上。最后,控制组件控制输送带继续运行,并持续对下一个治具进行清洁检测。
62.本实施例中,通过使自动清洁系统自动将清洁完成的治具放回输送带,实现清洁和回放整个流程的全自动化运行,从而提高了对治具进行清洁和使用的自动化程度。
63.在一个实施例中,信息交互组件,包括:扫描装置和上位机。
64.其中,扫描装置用于对治具进行扫描,以得到扫描信息。扫描装置可以采用扫码枪、图像采集装置等。相应地,需提前在治具上设置可被扫描的标签等物,例如,条形码、二维码、文字标签等。
65.具体地,在控制组件判断当前输送带上存在治具,并控制输送带停止运行后,信息交互组件中的扫描装置对治具进行扫描,并将得到的扫描信息发送至与扫描装置连接的上位机。扫描信息可以是唯一性治具标识、投入使用时刻、投入使用次数等。上位机接收扫描装置发送的扫描信息,根据扫描信息确定治具需要清洁后,向控制组件发送清洁信号。例如,扫描信息为唯一性治具标识。上位机根据治具标识查询与该治具标识对应的已使用次数为a次。次数使用阈值为b,a大于b,则说明该治具需要清洁,上位机向控制组件发送清洁信号。
66.本实施例中,通过设置治具清洁准入条件,使信息交互组件在判断治具满足治具清洁准入条件后再发送清洁信号至控制组件,以使控制组件控制各个组件对治具进行清洁,既可以避免清洁过度带来的资源浪费问题,也可以实现对治具的周期性稳定清洁,确保各个治具能够保持较好的清洁状态。
67.在一个实施例中,控制组件包括处理模块,以及与处理模块连接的运动控制模块。
68.其中,处理模块可以通过数字信号处理器、微处理器、特定集成电路、中央处理器等实现。运动控制模块可以用于对抓取机构进行定位控制。
69.具体地,控制组件中的处理模块在接收到信息交互组件发送的清洁信号后,根据清洁信号驱动电磁阀工作。电磁阀可以采用液压式、气压式等。抓取机构在电磁阀的驱动下从输送带上抓取治具。处理模块向运动控制模块发送定位控制信号,以使运动控制模块基于定位控制信号驱动抓取机构将治具从输送带运输至清洁平台。处理模块驱动电磁阀关闭,以使抓取机构将治具放置于清洁平台上。
70.进一步地,在清洁平台停止清洁工作后,处理模块和运动控制模块还可以参照上述过程将治具从清洁平台运输至输送带,在此不做具体阐述。
71.本实施例中,通过采用处理模块和运动控制模块,使控制组件能够精准地驱动抓取机构在输送带和清洁平台之间运输治具,提升了自动清洁系统的运行精准度。
72.在一个实施例中,抓取机构包括:夹持结构和第一驱动电机。
73.其中,夹持结构可以采用气缸夹爪、液压式夹爪等任一种。第一驱动电机可以采用伺服电机、步进电机等。第一驱动电机分别与夹持结构、运动控制模块连接。
74.具体地,处理模块基于清洁信号控制电磁阀运行。电磁阀带动夹持结构从输送带上夹持治具。运动控制模块接收处理模块基于清洁信号发送的定位控制信号,对第一驱动电机进行定位控制,以使第一驱动电机在运动控制模块的驱动下带动夹持结构移动至清洁平台。处理模块驱动电磁阀关闭,以使夹持结构将治具放置于清洁平台上。
75.在一个实施例中,清洁平台包括:毛刷和第二驱动电机。
76.其中,毛刷与第二驱动电机连接。毛刷的刷毛可以按照一定的排列方式排列,例如,按照山峰状、弧状等方式排列,用于对治具的型腔进行清洁。第二驱动电机可以采用伺
服电机、步进电机等。具体地,控制组件中的处理模块向第二驱动电机发送启动信号。第二驱动电机收到该启动信号后启动,带动毛刷以预设速度对治具的型腔进行清洁。
77.本实施例中,通过在清洁平台使用毛刷和第二驱动电机,在第二驱动电机的带动下使毛刷能够对治具的型腔进行清洁,可以提升对治具的型腔的清洁效果。
78.在一个实施例中,清洁平台还包括:吹气阀、排气阀、静电消除器中的至少一个。
79.其中,吹气阀、排气阀、静电消除器可以设置在清洁平台的预设位置处,例如,设置在毛刷的相邻位置处,用以辅助毛刷对治具进行清洁。具体地,控制组件中的处理模块在清洁平台执行清洁工作后,控制电磁阀工作。吹气阀在电磁阀的驱动下进行吹气工作,和/或,排气阀在电磁阀的驱动下进行排气工作,和/或,静电消除器电磁阀的驱动下进行静电消除工作。
80.进一步地,在毛刷、吹气阀、排气阀等任一个的相邻位置处还可以设置灰尘收集袋。在毛刷、吹气阀、排气阀等执行清洁工作时使灰尘颗粒进入灰尘收集袋,从而可以避免治具被二次污染。
81.进一步地,当控制组件中的处理模块判断清洁时长已达到预设的清洁时长阈值时,可以先向第二驱动电机发送停止工作信号,以使第二驱动电机带动毛刷停止工作。在等待预设时间间隔(例如,2秒)后,再控制电磁阀关闭,以使吹气阀、排气阀、静电消除器中的至少一个能够持续作业预设时间间隔,将清洁平台中的灰尘排出到灰尘收集袋中。
82.本实施例中,通过在清洁平台使用毛刷、吹气阀、排气阀中的至少一个,辅助毛刷对治具进行清洁,有助于提升治具的清洁效果。
83.在一个实施例中,清洁平台还包括:护罩和第三驱动电机。
84.其中,护罩和第三驱动电机连接。第三驱动电机可以采用伺服电机、步进电机等。
85.具体地,控制组件中的处理模块在获取治具已被放置于清洁平台后,向第三驱动电机发送启动信号。第三驱动电机收到启动信号后带动护罩关闭,以在清洁平台形成密闭空间。
86.进一步地,当控制组件中的处理模块驱动清洁平台中的毛刷、吹气阀、排气阀、静电消除器等停止清洁工作后,处理模块向第三驱动点击发送启动信号,以使第三驱动电机带动护罩打开。
87.本实施例中,通过在清洁平台上设置护罩,在对治具进行清洁时形密闭空间,可以避免清洁作业时灰尘颗粒进入清洁平台,有助于改善清洁效果。
88.在一个实施例中,清洁平台还包括:定位装置。在控制组件中的处理模块获取治具已被放置于清洁平台后,处理模块控制定位装置将治具定位在清洁平台的固定位置处,进而控制护罩关闭,控制毛刷、吹气阀、排气阀、静电消除器等对治具进行清洁。
89.本实施例中,通过在清洁平台上设置定位装置,使定位装置将治具定位至固定位置处,可以使毛刷对治具的型腔进行精准清洁。
90.图2示例性示出了一种具体的自动清洁系统的结构示意图。如图2所示,自动清洁系统包括:感应器210、控制组件220、信息交互组件230、抓取机构240、清洁平台250。其中:
91.感应器210可以采用红外传感器、超声波传感器等。
92.控制组件220与感应器210连接,控制组件220可以采用可编程控制器实现,包括处理器221,以及与处理器221连接的简易运动模块222。
93.信息交互组件230与控制组件220连接,包括扫码枪231,以及与扫码枪231连接的上位机232。
94.抓取机构240与控制组件220连接,包括气缸夹爪241,以及与气缸夹爪241连接和简易运动模块222连接的z向伺服电机242。
95.清洁平台250与控制组件220连接,包括定位装置251、步进电机252、与步进电机252连接的毛刷253、伺服电机254、与伺服电机254连接的护罩255、吹气阀256、排气阀257、静电消除器258、灰尘收集袋259。
96.具体地,在输送带执行输送治具的工作过程中,当感应器210检测到有治具到达时,向控制组件220发送治具的到达信号。控制组件220中的处理器221接收该到达信号,控制输送带停止工作。每个治具上预先设置有与每个治具对应的条形码。信息交互组件230中的扫码枪231对当前到达的治具进行扫描,得到该治具的扫描信息。扫码枪231将扫描信息发送至上位机232。当上位机232根据扫描信息判断该治具的使用次数已达到使用次数阈值时,向控制组件220发送清洁信号。
97.控制组件220在接收到清洁信号后,通过处理器221驱动电磁阀工作,以使抓取机构240中的气缸夹爪241在电磁阀的驱动下从输送带上抓取治具。处理器221向简易运动模块222发送定位控制信号,以使简易运动模块222驱动z向伺服电机242将治具从输送带运输至清洁平台250。处理器221驱动电磁阀关闭,以使气缸夹爪241将治具放置于清洁平台250上。控制组件220控制输送带继续运行。
98.处理器221驱动定位装置251,使定位装置251对治具进行定位。处理器221向伺服电机254发送启动信号。伺服电机254收到启动信号后带动护罩255关闭。处理器221向步进电机252发送启动信号。步进电机252收到该启动信号后启动,带动毛刷253以预设速度对治具的型腔进行清洁。处理器221驱动电磁阀工作,以使吹气阀256执行吹气工作、排气阀257执行排气工作、静电消除器258执行静电消除工作。将清洁出的灰尘颗粒收集至灰尘收集袋259。
99.处理器221在确定清洁平台250已工作预设时长,向步进电机252发送停止清洁信号。在等待一定时间间隔后,控制电磁阀关闭,以使吹气阀256、排气阀257、静电消除器258停止运行。控制伺服电机254运行,以使伺服电机254带动护罩255打开。
100.处理器221驱动电磁阀工作,以使抓取机构240中的气缸夹爪241在电磁阀的驱动下从清洁平台250上抓取治具。处理器221向简易运动模块222发送定位控制信号,以使简易运动模块222驱动z向伺服电机242按照预设速度将治具从清洁平台250运输至输送带上方。当处理器221根据感应器210发送的信号判断当前输送带上没有治具时,控制输送带停止运行。处理器221控制简易运动模块222驱动z向伺服电机242下降,驱动电磁阀关闭,以使气缸夹爪241将治具放置于输送带上。处理器221控制输送带继续运行,使治具投入产线使用。
101.图3和图4示例性示出了采用上述自动清洁系统对v25输送带上的治具进行清洁,使用清洁后的治具对电池产品进行测试得到的效果对比图。如图3所示,v25输送带上的治具在清洁后测试的阻抗占比有着明显的改善。如图4所示,v25输送带上的治具在清洁后测试的低电平占比有着明显的改善。
102.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存
在矛盾,都应当认为是本说明书记载的范围。
103.以上所述实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1