干式镭射清洗设备的制作方法
1.本实用新型涉及激光清洁领域,特别指干式镭射清洗设备。
背景技术:
2.目前,采用激光照射来清理材料表面所积累的污垢作为常规的技术被广泛应用,现常用的是采用机械手臂来夹持住激光光源,通过机械手臂来带动激光光源来对材料进行清洗,然而因机械手臂作业的高度和速度的限制,对于高度较高的材料则无法达到最佳清洗效果,另一方面,目前广泛应用的激光光源常用半导体泵浦固体激光,除了无法自动对焦外,使用一段时间之后需要更换共振腔等零件,更换过程繁杂,不利于使用。
3.中国专利(公告号cn 103736693 a)公开用于核电站放射性污染去污的激光清洁系统,包括激光发生器、与激光发生器的激光输出口相连的激光传导装置、设置在目标材料附近的作业监控系统、控制系统、废物回收系统,激光传导装置包括与激光发生器的激光输出口相连并用于传输激光的光纤、用于将光纤的激光输出口移动到放射性污染物表面上方的移动器、机械手臂、设置在机械手臂上的操作装置,光纤固定设置在移动器内且光纤的激光输出口位于移动器的一端部,移动器的一端部悬空而另一端部安装在机械手臂上,操作装置用于控制机械手臂和移动器的运动,移动器的运动带动光纤的激光输出口移动。可见,上述清洁系统是采用常规的机械手臂和移动器进行激光的移动输出,所述并不能灵活调节作业的高度,清洁效果不佳,以及使用常规的激光发生器进行激光发射,不便于长期的使用。
技术实现要素:
4.本实用新型的目的是提出干式镭射清洗设备,可灵活调节激光清洁模组作业的位移,精准度高,具有优异的清洁效果,光转换率高,低损耗,使用寿命长。
5.为了达到上述目的,本发明采用的技术方案如下:干式镭射清洗设备,包括机台,所述机台上设有置物平台,以及光纤镭射模组、镭射清洗模组、供电模组和控制模组,所述光纤镭射模组、镭射清洗模组分别与控制模组电性连接;所述镭射清洗模组设有轴向轨道组,所述轴向轨道组上滑动连接有一承接座,所述承接座上设有镭射光刀,所述镭射光刀通过光纤与光纤镭射模组连接。
6.根据以上方案,所述置物平台上方设有遮蔽壳体,所述遮蔽壳体的一侧设有两扇防护拉门,所述遮蔽壳体内部顶壁设置有一方位感测装置。
7.根据以上方案,所述置物平台上设有一块可拆卸的放置平板,所述平板下方设有一个转轴装置。
8.根据以上方案,所述轴向轨道组包括第一平行轴向轨道组、第二平行轴向轨道组和垂直轴向轨道组,所述第一平行轴向轨道组设有两个,并平行设置于平板的两侧,可进行y轴方向上的往复运动。
9.根据以上方案,所述第二平行轴向轨道组跨设于两个第一平行轴向轨道组的上
方,并与第一平行轴向轨道组滑动连接,可进行x轴方向上的往复运动。
10.根据以上方案,所述垂直轴向轨道组与第二平行轴向轨道组滑动连接,所述承接座滑动连接于垂直轴向轨道组上,可进行z轴方向上的往复运动。
11.根据以上方案,所述承接座上还设有高度感测装置和影像撷取装置。
12.根据以上方案,所述承接座与高度感测装置、影像撷取装置以及镭射光刀之间设有微调结构。
13.根据以上方案,所述光纤镭射模组包括激光器、聚焦透镜、光纤、光纤连接器、耦合器和镭射光刀。
14.根据以上方案,所述机台上还设有空气过滤装置和警报装置,所述空气过滤装置和警报装置分别与控制模组电性连接。
15.本实用新型的干式镭射清洗设备,采用多轴向移动轨道进行激光清洁作业,可进行实时监测调整激光参数以及移动轨迹,清洁高效全面,具有优异的清洁效果,本结构光转换率高,耐震动,低损耗,维护成本低,具有较长的使用寿命。
附图说明
16.图1是本实用新型的外部整体示意图;
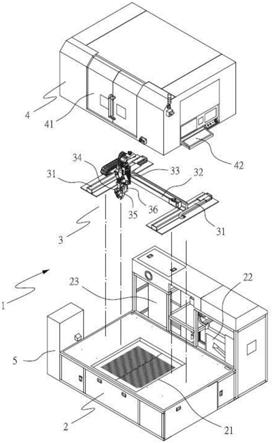
17.图2是本实用新型的结构分解示意图1;
18.图3是本实用新型的结构分解示意图2;
19.图4是本实用新型的激光清洁模组结构示意图;
20.图5是本实用新型的遮蔽壳体结构示意图;
21.图6是本实用新型的使用状态示意图1;
22.图7是本实用新型的使用状态示意图2;
23.图8是本实用新型的使用状态示意图3.
24.图中:1、设备本体;2、机台;21、置物平台;211、平板;212、转轴装置;22、光纤镭射模组;23、供电模组;24、空气监测过滤装置;3、镭射清洗模组;31、第一平行轴向轨道组;32、第二平行轴向轨道组;33、垂直轴向轨道组;34、镭射光刀;35、高度感测装置;36、影像撷取装置;37、微调结构;4、遮蔽壳体;41、防护拉门;411、观测窗;42、控制模组;421、影像显示装置;43、方位感测装置;44、警报装置;5、空气监测过滤装置;6、待清洁材料。
具体实施方式
25.下面结合附图与实施例对本实用新型的技术方案进行说明。
26.如图1和2所示,本实用新型所述的干式镭射清洗设备,包括机台2,所述机台2上设有置物平台21,以及光纤镭射模组22、镭射清洗模组3、供电模组23和控制模组42,所述光纤镭射模组22、镭射清洗模组(3)分别与控制模组42电性连接;所述镭射清洗模组3设有平行轴向轨道组和垂直轴向轨道组33,所述垂直轴向轨道组33滑动连接有一承接座,所述承接座上设有高度感测装置35、影像撷取装置36和镭射光刀34,所述镭射光刀34通过光纤与光纤镭射模组22连接,所述置物平台21上方设有遮蔽壳体4,所述遮蔽壳体4内部顶壁上设有方位感测装置43。本发明通过控制模组42驱动平行轴向轨道组和垂直轴向轨道组33移动来带动镭射光刀34运动作业,通过照射达到对待清洁材料6清洁的目的,同时辅以高度感测装
置35和方位感测装置43来感测待清洁材料6的高度和位置,使得光纤镭射光刀34可更精准移动清洁,具有优异的清洁效果。
27.如图2所示,所述光纤镭射模组22和供电模组23设置在置物平台21的一侧,所述光纤镭射模组22包括激光器、聚焦透镜、光纤、光纤连接器、耦合器和镭射光刀34,所述激光器发出的激光束经过聚焦透镜汇聚,通过光纤连接器进入光纤,多股光纤通过耦合器耦合后将激光能量输送至镭射光刀34,所述的光纤套接在柔性套管内,并延伸出光纤镭射模组22外部与镭射光刀34连接,所述镭射光刀34套设于垂直轴向轨道组33的承接座上,所述光纤长度设置较长,可适用于镭射光刀34随轨道来回往返运动,所述光纤镭射模组22与控制模组42电性连接,可进行激光光束参数的调节。本激光结构不具备激光谐振腔,可免除谐振腔更换和校正的繁杂程序,维护成本低,耐震动,光转换率高,低损耗。
28.如图2和图3所示,所述置物平台21上设有一块可拆卸的放置平板211,可用于放置待清洁材料6,所述平板211下方设有一个转轴装置212,所述转轴装置212可与待清洁材料6插接连接,实现转动照射清洁。
29.如图3和图4所示,所述平板211的上方设有镭射清洗模组3,所述镭射清洗模组3设有平行轴向轨道组和垂直轴向轨道组33,所述平行轴向轨道组包括第一平行轴向轨道组31和第二平行轴向轨道组32,所述第一平行轴向轨道组31设有两个,并平行设置于平板211的两侧,可进行y轴方向上的往复运动,第二平行轴向轨道组32跨设于两个第一平行轴向轨道组31的上方,并通过滑块与第一平行轴向轨道组31滑动连接,可进行x轴方向上的往复运动,所述垂直轴向轨道组33与第二平行轴向轨道组31滑动连接,可进行z轴方向上的往复运动,所述的垂直轴向轨组33上滑动连接有承接座,所述承接座与高度感测装置35、影像撷取装置36以及镭射光刀34之间设有微调结构37。通过控制模组42驱动第一平行轴向轨道组31、第二平行轴向轨道组32和垂直轴向轨道组33的移动,可实现高度感测装置35、影像撷取装置36和镭射光刀34的x、y、z的方向的往复移动,所涉及的宽度和高度更广,可实现高度感测装置35和镭射光刀34的灵活移动,感测和清洁效果更佳,通过微调结构37的设置,可进行高度感测装置35、影像撷取装置36和镭射光刀34的角度微调,清洁精准度更高。所述的高度感测装置35可对材料的高度进行扫描感测,并将感测信号传输给控制模组42,得到所述材料的高度数据;所述影像撷取装置36可随镭射光刀34移动而拍摄激光清洁过程,供工作人员查看。
30.如图5和图6所示,所述置物平台21上方设有遮蔽壳体4,所述遮蔽壳体4上设置有两扇可移动的防护拉门41,所述防护拉门41上设有观测窗411,可供工作人员实时查看内部情况。所述防护拉门41可移动开启,向平板211上放置待清洁材料6,再关闭防护拉门41,以进行激光清洁;所述控制模组42设置于遮蔽壳体4外表面的一侧,所述控组模组上设有影像显示装置421,所述影像显示装置421的输入端与影像撷取装置36的输出端连接,可实时显示影像撷取装置36的拍摄视频;所述遮蔽壳体4内部顶壁设置有一方位感测装置43,用于感测待清洁材料6的位置,所述方位感测装置43所收集到信息传输至控制模组42进行汇总计算;所述遮蔽壳体4外部远离控制模组42的一侧设有一空气监测过滤装置5,所述空气监测过滤装置5设有粉尘监测器、温度检测器及过滤装置,所述空气监测过滤装置5的输入端与遮蔽壳体4内腔相连,可进行激光清洁过程中的粉尘过滤,以及粉尘浓度和温度的监测,所述的粉尘监测器和温度检测器的输出端与控制模组42电性连接,由控制模组42根据两者收
集的信号判断是否超出了预设的阈值,以更好的监控清洁内腔的工作环境。所述的遮蔽壳体4上还设有警报器,所述警报装置44的输入端与控制模组42连接,当控制模组42判断遮蔽壳体4内腔的粉尘浓度或温度超出预设的阈值,则控制警报装置44发出警报鸣声及灯光闪烁,提醒工作人员处理调整。
31.如图6、图7和图8所示,本设备在使用时,所述待清洁材料6放置于平板211上,针对管材等可插接的待清洁材料6进行清洁时,可以将平板211拆卸,将管材材料插接在转轴装置212上,可通过转轴装置212驱动待清洁材料6转动,通过控制模组42驱动方位感测装置43和高度感测装置35对待清洁材料6所处的位置和材料高度进行扫描感测,并向控制模组42传输感测信号,控制模组42对两者感测信号进行汇总计算,可得出待清洁材料6的位置、尺寸大小及形状,控制模组42根据数据规划出相应的清洁路线,继而驱动第一、第二平行轴向轨道与垂直轴向轨道移动,镭射光刀34随之移动至待清洁材料6的表面进行照射清洁,清洁效果高效准确,同时,影像撷取装置36可对材料清洁过程进行实时拍摄,工作人员可通过影像显示装置421来实时监控清洗情况,并根据材料的脏污程度,调整激光光束参数和镭射光刀34的移动位置,以达到更好的清洁效果。
32.以上所述仅是本发明的较佳实施方式,故凡依本发明专利申请范围所述的构造、特征及原理所做的等效变化或修饰,均包括于本发明专利申请范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1