一种用于ISO罐体外表面的机械臂清洗装置的制作方法
一种用于iso罐体外表面的机械臂清洗装置
技术领域
1.本技术涉及清洗装置的技术领域,尤其是涉及一种用于iso罐体外表面的机械臂清洗装置。
背景技术:
2.iso罐体是一种国际标准的罐体,罐体呈圆筒状,用于运输酒、油、食品原料或化学药剂等液体的运输装置。
3.罐体生产完成后,在罐体使用之前,需要对罐体进行清洁。一般的,通过人工使用高压水枪的方式对罐体外壁进行清洗,但此方法不光清洗效率低下,同时会造成水资源的大量浪费。
技术实现要素:
4.为了提高对罐体的清洗效率,本技术提供一种用于iso罐体外表面的机械臂清洗装置。
5.本技术提供的一种用于iso罐体外表面的机械臂清洗装置采用如下的技术方案:
6.一种用于iso罐体外表面的机械臂清洗装置,包括用于与机器人相连的支撑臂,所述支撑臂一端与机器人六轴相连,所述支撑臂的另一端设置有清洗组件,所述清洗组件包括水箱,所述水箱与外界水源相连通,所述水箱上开设有喷水孔,所述水箱上均匀设置有若干刷毛。
7.通过上述技术方案,通过机器人的动作,带动支撑臂动作,使刷毛与罐体的外壁相接触,同时,水从水箱的喷水孔中向外喷出,通过刷毛与罐体外壁之间的摩擦配合水流,对罐体外壁进行高效清洁,同时,机器人灵活动作,使刷毛与罐体的整个外壁进行刷洗清洁,大大提高了对罐体的清洁效率。
8.进一步的,所述夹持组件包括夹持柱,所述支撑臂靠近机器人的一端通过连接组件与机器人相连,所述连接组件包括第一法兰盘与快换连接盘,所述第一法兰盘用于与机器人六轴相连,所述快换连接盘与所述第一法兰盘相连,所述支撑臂的一端连接有与快换连接盘相连的第二法兰盘。
9.通过上述技术方案,第一法兰盘与机器人六轴相连,快盘连接盘的一端与第一法兰盘相连,快换连接盘的另一端与第二法兰盘相连,实现了支撑臂与机器人的快速连接。
10.进一步的,所述水箱上连接有支架,所述支架上设置有第一安装板,所述支撑臂的端头连接有第二安装板,所述第一安装板与所述第二安装板相连。
11.通过上述技术方案,通过第一安装板以及第二安装板的连接,实现了支撑臂与水箱的快速连接。
12.进一步的,所述水箱上连通有水管,所述水管与外界水源相连通,所述支撑臂上均匀设置有若干个用于固定水管的限位带。
13.通过上述技术方案,外界水源的水通过水管流入水箱中,从喷水孔中喷出,实现了
对筒壁的清洁,限位带对水管进行限位固定,降低了支撑臂活动过程中水管出现缠绕打结的可能性。
14.进一步的,所述限位带的一端与所述支撑臂转动连接,所述限位带的另一端设置有固定扣,所述支撑臂上设置有挂接扣,所述挂接扣与所述固定扣挂接配合。
15.通过上述技术方案,通过挂接扣与固定扣的扣合,实现了对水管的限位固定,同时方便了对限位带的开合。
16.可选的,所述水箱上设置有清洁剂喷洒组件,所述清洁剂喷洒组件包括清洁剂箱,所述水箱上设置有水路块,所述水路块与所述清洁剂箱之间通过抽吸泵相连通,所述水路块上设置有雾化喷头。
17.通过上述技术方案,抽吸泵将清洁剂箱中的清洁剂抽出到水路块中,清洁剂通过雾化喷头向喷出,均匀细致地喷洒在罐体上,进一步提升了对罐体的清洁效果。
18.进一步的,所述雾化喷头设置有若干个,若干个所述雾化喷头均匀设置在所述水路块上。
19.通过采用上述技术方案,多个雾化喷头的设置,增加了单位时间内相罐体上喷出的清洁剂的量,配合毛刷更好地对罐体进行清洗。
20.进一步的,所述支撑臂包括第一支撑部以及第二支撑部,所述第一支撑部与吧是所述第二支撑部相垂直,所述第一支撑部的一端与所述第二法兰盘相连,所述第一支撑部的另一端与所述第二支撑部相连,所述第二支撑部的另一端与所述第二安装板相连。
21.通过采用上述技术方案,区别于直线状的支撑臂,呈折弯状设置的支撑臂更易配合机器人动作,对罐体进行清洁,使支撑臂动作过程中的角度更加灵活。
22.综上所述,本技术包括以下至少一个有益技术效果:
23.1.通过机器人的动作,带动支撑臂动作,使刷毛与罐体的外壁相接触,同时,水从水箱的喷水孔中向外喷出,通过刷毛与罐体外壁之间的摩擦配合水流,对罐体外壁进行高效清洁,同时,机器人灵活动作,使刷毛与罐体的整个外壁进行刷洗清洁,大大提高了对罐体的清洁效率;
24.2.抽吸泵将清洁剂箱中的清洁剂抽出到水路块中,清洁剂通过雾化喷头向喷出,均匀细致地喷洒在罐体上,进一步提升了对罐体的清洁效果。
附图说明
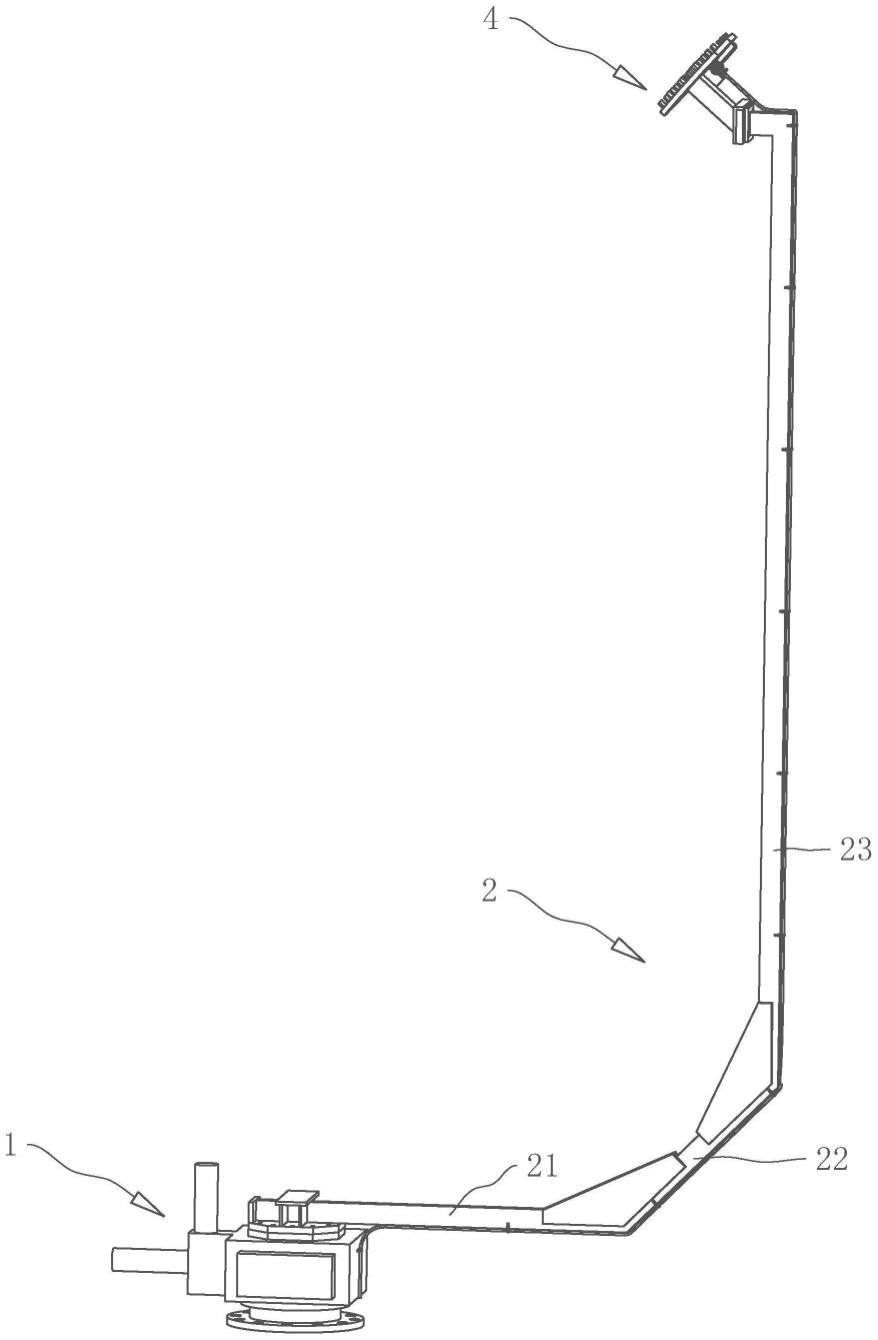
25.图1为本技术的整体结构示意图;
26.图2为本技术连接组件结构的示意图;
27.图3是为本技术清洗组件及清洁剂喷洒组件结构的示意图;
28.图4是为本技术清洗组件及清洁剂喷洒组件结构的示意图(另一视角)。
29.图中,1、连接组件;011、第一法兰盘;012、快换连接盘;2、支撑臂;21、第一支撑部;22、第二支撑部;23、连接部;3、第二法兰盘;4、清洗组件;41、水箱;411、喷水孔;42、刷毛;43、水管;5、支架;6、第一安装板;7、第二安装板;8、限位带;9、挂接扣;11、固定扣;12、清洁剂喷洒组件;121、清洁剂箱;122、抽吸泵;123、水路块;124、雾化喷头;125、进水管;126、出水管。
具体实施方式
30.以下结合附图1-4对本技术作进一步详细说明。
31.本技术实施例公开一种用于iso罐体外表面的机械臂清洗装置,请参阅图1-2,包括用于与机器人相连的支撑臂2,支撑臂2包括相互垂直的第一支撑部21以及第二支撑部22,第一支撑部21的一端与第二支撑部22的一端通过连接部23相连,第一支撑部21与第二支撑部22相垂直且呈l形,连接部23与第一支撑部21以及第二支撑部22均为倾斜设置,第一支撑部21的一端通过连接组件1与机器人的六轴相连,第二支撑臂2的另一端设置有清洗组件4。
32.参照图1,支撑臂2通过连接组件1与机器人六轴进行连接后,机器人启动,带动支撑臂2自由活动,通过清洗组件4对罐体进行清洗。
33.参照图1和图2,连接组件1包括第一法兰盘011以及快换连接盘012,第一法兰盘011与快换连接盘012通过螺栓固定连接,第一支撑部21背离第二支撑部22的侧壁且靠近端头的位置固定连接有第二法兰盘3。
34.参照图1和图2,第一法兰盘011与机器人的六轴通过螺栓固定连接,第二法兰盘3通过螺栓与快换连接盘012通过螺栓固定连接,实现了支撑臂2与机器人六轴的快速连接。
35.参照图1和图3,清洗组件4包括水箱41,水箱41为内部中空的圆柱状,水箱41的侧壁上固定连接有支架5,支架5上固定连接有第一安装板6,第二支撑部22靠近第一支撑部21的侧壁且靠近端头的位置固定连接有第二安装板7,第一安装板6与第二安装板7通过螺栓固定连接。
36.参照图3和图4,水箱41背离支架5的一端均匀开设有若干个喷水孔411且均匀设置有若干刷毛42,刷毛42与水箱41固定连接,水箱41上设置有水管43,水管43的一端与水箱41相连通,水箱41的另一端与外界水源相连通,支撑臂2上均匀设置有若干个限位带8,限位带8的一端与支撑臂2转动连接,限位带8的另一端固定连接有固定扣11,支撑臂2上对应挂接扣9的位置固定连接有挂接扣9,挂接扣9与固定扣11挂接配合。
37.参照图3和图4,外界水源的水从水管43通入水箱41中,从喷水孔411向外喷出,刷毛42与罐体外壁抵触后,通过摩擦力对罐体外壁进行清洗。
38.参照图3和图4,水箱41上设置有清洁剂喷洒组件12,清洁剂喷洒组件12包括清洁剂箱121,清洁剂箱121与水箱41固定连接,水箱41上固定连接有抽吸泵122及水路块123,水路块123为内部中空的长方体状,清洁剂箱121与抽吸泵122之间通过进水管125相连,抽吸泵122与水路块123之间通过出水管126相连,水路块123靠近刷毛42的侧壁上均匀设置有若干个雾化喷头124。
39.参照图3和图4,抽吸泵122将清洁剂箱121中的清洁剂抽出到水路块123中,清洁剂通过雾化喷头124向喷出,均匀细致地喷洒在罐体上,与水流混合进一步提升了对罐体的清洁效果。
40.本技术实施例一种用于iso罐体外表面的机械臂清洗装置的实施原理为:外界水源的水通过水管43流入水箱41中,水箱41中的水从喷水孔411中向外喷出。同时抽吸泵122启动,将清洁剂箱121中的清洁剂抽入水路块123中,从雾化喷头124中喷出,与水流混合。机器人带动支撑臂2移动,使刷毛42与罐体的外壁2相抵触,对罐体外壁进行自动清洁。
41.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术
的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1