一种基于生态浮岛的水体富营养化优化系统及方法与流程
1.本发明涉及生态修复技术领域,尤其涉及一种基于生态浮岛的水体富营养化优化系统及方法。
背景技术:
2.生态浮岛,又称人工浮床、生态浮床等。它是人工浮岛的一种,针对富营养化的水质,利用生态工学原理,降解水中的cod、氮和磷。它以水生植物为主体,运用无土栽培技术原理,以高分子材料等为载体和基质,应用物种间共生关系,充分利用水体空间生态位和营养生态位,从而建立高效人工生态系统,用以削减水体中的污染负荷。它能使水体透明度大幅度提高,同时水质指标也得到有效的改善,特别是对藻类有很好的抑制效果。
3.近年来,河、湖泊、水库、池塘等水体受到环境污染,造成水体富营养化,破坏了水体的生态平衡,因此对于水体富营养化程度的检测及分析对于了解一片水域的水质情况而言尤为重要。同一水域的水质在不同区域的水体营养化程度也存在一定差异。目前,在现有技术中,一般都是通过定期通过人工对水体进行取水采样,再送去外部分析装置对水体富营养化程度进行分析,在分析结果表明富营养化程度较为严重时,对该片水域采取措施降低水体富营养化程度,由于该过程耗费时间较长,因此会造成对水体富营养化补救不及时,进而导致水体生态环境被破坏。
技术实现要素:
4.针对现有技术存在的不足,本发明的目的在于提供一种基于生态浮岛的水体富营养化优化系统及方法,用于提升水体富营养化净化效率,自动降低水体富营养化程度。
5.为实现上述目的,本发明提供了如下技术方案:一种基于生态浮岛的水体富营养化优化系统,包括:
6.生态浮岛,放置在一子水域中,所述子水域由一待净化水域预先划分而成,各所述子水域预先配置有水域地址,各所述生态浮岛预先配置有浮岛地址,所述生态浮岛自上而下依次包括互相可拆卸连接的土壤放置组件、生物净化组件、鱼网组件与配重净化组件;
7.所述土壤放置组件漂浮于水面,所述土壤放置组件的侧端固定有驱动模块,所述生物净化组件、所述鱼网组件与所述配重净化组件位于所述子水域内部,所述生物净化层内部预先填充有用于降低所述子水域中氮磷含量的生物填料;
8.第一检测模块,固定设置在所述鱼网组件的外侧壁上,用于实时检测所述鱼网组件外侧的所述子水域中的氮磷含量,生成第一检测结果;
9.第二检测模块,固定设置在所述配重净化组件的外侧壁上,用于实时检测所述配重净化组件外侧的所述子水域中的氮磷含量,生成第二检测结果;
10.处理模块,分别连接所述第一检测模块、所述第二检测模块和外部的远程监控模块,用于将所述第一检测结果和所述第二检测结果输入预设的富营养化分析公式中,处理得到关联于所述水域地址的水体富营养程度值,并将所述水域地址相对应的所述子水域标
记为目标水域;
11.所述远程监控模块连接所述驱动模块,所述远程监控模块在所述水体富营养程度值大于预设的富营养程度阈值时根据所述水体富营养程度值生成一关联于所述水域地址的驱动指令;
12.与所述目标水域相邻的所述子水域内的各所述驱动模块根据所述驱动指令带动所述生态浮岛驶往所述目标水域,以降低所述目标水域内的氮磷含量。
13.进一步地,所述土壤放置组件的侧端还固定有定位模块,连接所述远程监控模块,所述定位模块用于对所述生态浮岛的位置进行实时定位生成定位信息,则所述远程监控模块包括:
14.位置判断单元,用于根据所述定位信息判断所述生态浮岛在所述子水域中的实时位置;
15.距离分析单元,连接所述位置判断单元,用于根据所述实时位置分析得到所述目标水域与所述浮岛地址相对应的所述生态浮岛之间的实时距离;
16.指令生成单元,连接所述位置判断单元,用于将所述实时距离及所述水体富营养程度值代入预设的紧急指数公式中,输出相应的紧急指数,并根据所述紧急指数生成所述驱动指令。
17.进一步地,所述指令生成单元包括:
18.第一生成单元,用于在所述紧急指数大于预设的第一紧急阈值时生成第一驱动指令;
19.第二生成单元,用于在所述紧急指数大于预设的第二紧急阈值且所述紧急指数不大于所述第一紧急阈值时生成第二驱动指令;
20.第三生成单元,用于在所述紧急指数不大于所述第二紧急阈值时生成第三驱动指令;
21.所述第一驱动指令的优先级高于所述第二驱动指令,所述第二驱动指令的优先级高于所述第三驱动指令。
22.进一步地,所述紧急指数公式配置为:
[0023][0024]
其中s用于表示所述紧急指数;
[0025]
a用于表示预设的距离常数;
[0026]
x用于表示所述实时距离;
[0027]
b用于表示预设的营养程度常数;
[0028]
y用于表示所述水体富营养程度值。
[0029]
进一步地,所述富营养化分析公式配置为:
[0030]
r=a(k
′
1-k1)2/(k
′1+k1)+b(k
′
2-k2)2/(k
′2+k2);
[0031]
其中r用于表示所述水体富营养程度值;
[0032]
k1用于表示当前时刻的所述第一检测结果;
[0033]
k1'用于表示上一秒的所述第一检测结果;
[0034]
k2用于表示当前时刻的所述第一检测结果;
[0035]
k2'用于表示上一秒的所述第一检测结果;
[0036]
a用于表示预设的第一权重系数;
[0037]
b用于表示预设的第二权重系数。
[0038]
进一步地,所述驱动模块还连接有供电模块,所述供电模块包括太阳能板、太阳能电池和供电电路,所述太阳能板用于采集太阳能并转化为电能,所述太阳能电池用于储存所述电能,并通过所述供电电路供电给所述驱动模块。
[0039]
进一步地,所述第一权重系数与所述第二权重系数之间的关系配置为:
[0040]
a+b=1;
[0041][0042]
其中,m1用于表示预设的温度常数;
[0043]
t用于表示实时温度;
[0044]
m2用于表示预设的检测常数;
[0045]
n用于表示检测次数;
[0046]
m3用于表示预设的含氧常数;
[0047]
c用于表示含氧量。
[0048]
进一步地,所述土壤放置组件包括环形放置盘,所述环形放置盘的上端开设有环形槽口,所述环形槽口内预先放置有土壤,所述土壤上种植有观赏花朵,所述环形放置盘的中部贯穿设置有投饵口,所述驱动模块、所述处理模块和所述定位模块均固定在所述环形放置盘的侧壁上;
[0049]
所述生物净化组件包括净化套环,所述净化套环的中部贯穿设置有入饵通道,所述入饵通道连通所述投饵口,所述生物填料填充在所述净化套环内部,所述净化套环的侧壁开设有若干净化网孔,所述净化网孔的直径小于所述生物填料的颗粒直径。
[0050]
进一步地,所述鱼网组件包括鱼网兜,所述鱼网兜上端开设有入饵口,所述入饵口连通所述入饵通道,所述鱼网兜内预先放置有若干观赏鱼;
[0051]
所述配置净化组件包括网袋,所述网带内预先放置有若干用于配重的砂石、若干用于降低网袋中氮磷含量的生物填料和若干用于产生氧气的水生植物。
[0052]
一种基于生态浮岛的水体富营养化优化方法,应用于上述的基于生态浮岛的水体富营养化优化系统,生态浮岛放置在一子水域中,所述子水域由一待净化水域预先划分而成,各所述子水域预先配置有水域地址,该方法包括:
[0053]
步骤s1,第一检测模块实时检测所述鱼网组件外侧的所述子水域中的氮磷含量,生成第一检测结果;
[0054]
步骤s2,第二检测模块实时检测所述配重净化组件外侧的所述子水域中的氮磷含量,生成第二检测结果;
[0055]
步骤s3,处理模块将所述第一检测结果和所述第二检测结果输入预设的富营养化分析公式中,处理得到关联于所述水域地址的水体富营养程度值,并将所述水域地址相对应的所述子水域标记为目标水域;
[0056]
步骤s4,远程监控模块在所述水体富营养程度值大于预设的富营养程度阈值时根据所述水体富营养程度值生成一关联于所述水域地址的驱动指令;
[0057]
步骤s5,与所述目标水域相邻的所述子水域内的各驱动模块根据所述驱动指令带动所述生态浮岛驶往所述目标水域,以降低所述目标水域内的氮磷含量。
[0058]
本发明的有益效果:
[0059]
本发明通过收集各子水域中的生态浮岛检测得到的水体富营养程度值并上传至远程监控模块,使得远程监控模块驱使驱动模块,带动生态浮岛自动驶往水体富营养程度高的目标水域中,通过生态浮岛的生物净化组件和配置净化组件降低目标水域中的氮磷含量,实现了对富营养程度高的目标水域的自动净化,进而提升了水体富营养化的净化效率。
附图说明
[0060]
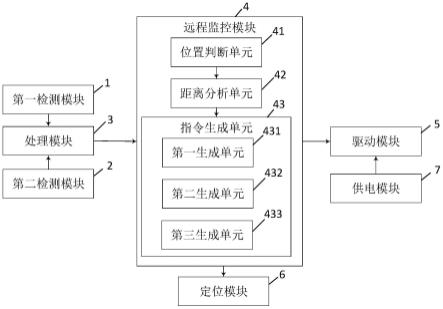
图1是本发明中基于生态浮岛的水体富营养化优化系统的结构示意图;
[0061]
图2是本发明中生态浮岛的内部剖视图;
[0062]
图3是本发明中基于生态浮岛的水体富营养化优化方法步骤流程图。
[0063]
附图标记:1、第一检测模块;2、第二检测模块;3、处理模块;4、远程监控模块;41、位置判断单元;42、距离分析单元;43、指令生成单元;431、第一生成单元;432、第二生成单元;433、第三生成单元;5、驱动模块;6、定位模块;7、供电模块;8、生态浮岛;81、土壤放置组件;82、生物净化组件;83、鱼网组件;84、配置净化组件。
具体实施方式
[0064]
下面结合附图和实施例,对本发明进一步详细说明。其中相同的零部件用相同的附图标记表示。需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”指的是附图中的方向,词语“底面”和“顶面”、“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。
[0065]
如图1和图2所示,本实施例的一种基于生态浮岛的水体富营养化优化系统,包括:
[0066]
生态浮岛8,放置在一子水域中,子水域由一待净化水域预先划分而成,各子水域预先配置有水域地址,各生态浮岛8预先配置有浮岛地址,生态浮岛8自上而下依次包括互相可拆卸连接的土壤放置组件81、生物净化组件82、鱼网组件83与配重净化组件;
[0067]
土壤放置组件81漂浮于水面,土壤放置组件81的侧端固定有驱动模块5,生物净化组件82、鱼网组件83与配重净化组件位于子水域内部,生物净化层内部预先填充有用于降低子水域中氮磷含量的生物填料;
[0068]
第一检测模块1,固定设置在鱼网组件83的外侧壁上,用于实时检测鱼网组件83外侧的子水域中的氮磷含量,生成第一检测结果;
[0069]
第二检测模块2,固定设置在配重净化组件的外侧壁上,用于实时检测配重净化组件外侧的子水域中的氮磷含量,生成第二检测结果;
[0070]
处理模块3,分别连接第一检测模块1、第二检测模块2和外部的远程监控模块4,用于将第一检测结果和第二检测结果输入预设的富营养化分析公式中,处理得到关联于水域地址的水体富营养程度值,并将水域地址相对应的子水域标记为目标水域;
[0071]
远程监控模块4连接驱动模块5,远程监控模块4在水体富营养程度值大于预设的富营养程度阈值时根据水体富营养程度值生成一关联于水域地址的驱动指令;
[0072]
与目标水域相邻的子水域内的各驱动模块5根据驱动指令带动生态浮岛8驶往目标水域,以降低目标水域内的氮磷含量。
[0073]
本技术方案通过收集各子水域中的生态浮岛8检测得到的水体富营养程度值并上
传至远程监控模块4,使得远程监控模块4驱使驱动模块5,带动生态浮岛8自动驶往水体富营养程度高的目标水域中,通过生态浮岛8的生物净化组件82和配置净化组件84降低目标水域中的氮磷含量,实现了对富营养程度高的目标水域的自动净化,进而提升了水体富营养化的净化效率。
[0074]
优选的,土壤放置组件81的侧端还固定有定位模块6,连接远程监控模块4,定位模块6用于对生态浮岛8的位置进行实时定位生成定位信息,则远程监控模块4包括:
[0075]
位置判断单元41,用于根据定位信息判断生态浮岛8在子水域中的实时位置;
[0076]
距离分析单元42,连接位置判断单元41,用于根据实时位置分析得到目标水域与浮岛地址相对应的生态浮岛8之间的实时距离;
[0077]
指令生成单元43,连接位置判断单元41,用于将实时距离及水体富营养程度值代入预设的紧急指数公式中,输出相应的紧急指数,并根据紧急指数生成关联于驱动指令。
[0078]
具体地,本实施例中,定位模块6可以为gps模块,该gps模块的型号可以为ublox_neo-m8n。gps模块对生态浮岛8的位置进行实时定位,并将定位信息发送至远程监控模块4,远程监控模块4中的位置判断单元41根据定位信息判断生态浮岛8在子水域中的实时位置,距离分析单元42根据实时位置处理得到生态浮岛8和目标水域之间的实时距离,并发送给指令生成单元43,指令生成单元43将实时距离和水体富营养话程度值带入紧急指数公式,使得紧急指数公式输出紧急指数,最后根据紧急指数生成不同的驱动指令。
[0079]
优选的,指令生成单元43包括:
[0080]
第一生成单元431,用于在紧急指数大于预设的第一紧急阈值时生成第一驱动指令;
[0081]
第二生成单元432,用于在紧急指数大于预设的第二紧急阈值且紧急指数不大于第一紧急阈值时生成第二驱动指令;
[0082]
第三生成单元433,用于在紧急指数不大于第二紧急阈值时生成第三驱动指令;
[0083]
第一驱动指令的优先级高于第二驱动指令,第二驱动指令的优先级高于第三驱动指令。
[0084]
具体地,本实施例中,第一紧急阈值可以为70,第二紧急阈值可以为30,当紧急指数大于70时,表明该目标水域的富营养状况紧急,需要第一时间前往净化,因此在紧急指数大于第一紧急阈值时生成的第一驱动指令的优先级最高;当紧急指数大于30不大于70时,表明该目标水域的富营养状况较为紧急,需要第二时间前往净化,因此在紧急指数大于第二紧急阈值且不大于第一紧急阈值时生成的第二驱动指令的优先级第二高;当紧急指数不小于30时,表明该目标水域的富营养状况较为不紧急,因此可以第三时间前往净化,因此在紧急指数不大于第二紧急阈值时生成的第三驱动指令的优先级最低。
[0085]
优选的,紧急指数公式配置为:
[0086][0087]
其中s用于表示紧急指数;
[0088]
a用于表示预设的距离常数;
[0089]
x用于表示实时距离;
[0090]
b用于表示预设的营养程度常数;
[0091]
y用于表示水体富营养程度值。
[0092]
具体地,本实施例中,a可以为5,b可以为13。
[0093]
优选的,富营养化分析公式配置为:
[0094]
r=a(k
′
1-k1)2/(k
′1+k1)+b(k
′
2-k2)2/(k
′2+k2);
[0095]
其中r用于表示水体富营养程度值;
[0096]
k1用于表示当前时刻的第一检测结果;
[0097]
k1'用于表示上一秒的第一检测结果;
[0098]
k2用于表示当前时刻的第一检测结果;
[0099]
k2'用于表示上一秒的第一检测结果;
[0100]
a用于表示预设的第一权重系数;
[0101]
b用于表示预设的第二权重系数。
[0102]
具体地,本实施例中,每次检测得到的第一检测结果和第二检测结果存储在处理模块3的物理存储容器中,每隔24小时数据清零。
[0103]
优选的,第一权重系数与第二权重系数之间的关系配置为:
[0104]
a+b=1;
[0105][0106]
其中,m1用于表示预设的温度常数;
[0107]
t用于表示实时温度;
[0108]
m2用于表示预设的检测常数;
[0109]
n用于表示检测次数;
[0110]
m3用于表示预设的含氧常数;
[0111]
c用于表示含氧量。
[0112]
具体地,本实施例中,第一检测模块1集成有计数器、温度传感器、含氧检测仪和氮磷含量检测器,计数器用于计算检测次数,温度传感器用于检测实时温度,含氧量检测仪用于检测含氧量,氮磷含量检测器用于检测氮磷含量。其中,m1可以为7,m2可以为9,m3可以为13。将检测得到的实时温度t、检测次数n和含氧量c带入公式中,得到第一权重系数a,再将第一权重系数a带入公式a+b=1中,得到b的值。
[0113]
优选的,驱动模块5还连接有供电模块7,供电模块7包括太阳能板、太阳能电池和供电电路,太阳能板用于采集太阳能并转化为电能,太阳能电池用于储存电能,并通过供电电路供电给驱动模块5。
[0114]
具体地,本实施例中,通过设置供电模块7,实现了利用太阳能供电给驱动模块5,保证了能源的清洁,利于环保。
[0115]
优选的,土壤放置组件81包括环形放置盘,环形放置盘的上端开设有环形槽口,环形槽口内预先放置有土壤,土壤上种植有观赏花朵,环形放置盘的中部贯穿设置有投饵口,驱动模块5、处理模块3和定位模块6均固定在环形放置盘的侧壁上;
[0116]
生物净化组件82包括净化套环,净化套环的中部贯穿设置有入饵通道,入饵通道连通投饵口,生物填料填充在净化套环内部,净化套环的侧壁开设有若干净化网孔,净化网孔的直径小于生物填料的颗粒直径。
[0117]
优选的,鱼网组件83包括鱼网兜,鱼网兜上端开设有入饵口,入饵口连通入饵通
道,鱼网兜内预先放置有若干观赏鱼。
[0118]
具体地,本实施例中,通过在环形槽口的中部设置投饵口,使得鱼饵可以通过从投饵口投入,依次经过入饵通道和入饵口进入鱼网兜内,实现对观赏鱼的投喂。
[0119]
优选的,配置净化组件84包括网袋,网带内预先放置有若干用于配重的砂石、若干用于降低网袋中氮磷含量的生物填料和若干用于产生氧气的水生植物。
[0120]
具体地,本实施例中,鱼网兜中的观赏鱼的排泄物通过鱼网兜的网孔落入网带中,网带中的生物填料使得水体中的微生物聚集分解排泄物,同时排泄物也可以作为网带中水生植物的养料,使得水生植物产生氧气,为观赏鱼供氧,实现生态平衡。
[0121]
一种基于生态浮岛的水体富营养化优化方法,应用于上述的基于生态浮岛的水体富营养化优化系统,生态浮岛8放置在一子水域中,子水域由一待净化水域预先划分而成,各子水域预先配置有水域地址,如图3所示,该方法包括:
[0122]
步骤s1,第一检测模块1实时检测鱼网组件83外侧的子水域中的氮磷含量,生成第一检测结果;
[0123]
步骤s2,第二检测模块2实时检测配重净化组件外侧的子水域中的氮磷含量,生成第二检测结果;
[0124]
步骤s3,处理模块3将第一检测结果和第二检测结果输入预设的富营养化分析公式中,处理得到关联于水域地址的水体富营养程度值,并将水域地址相对应的子水域标记为目标水域;
[0125]
步骤s4,远程监控模块4在水体富营养程度值大于预设的富营养程度阈值时根据水体富营养程度值生成一关联于水域地址的驱动指令;
[0126]
步骤s5,与目标水域相邻的子水域内的各驱动模块5根据驱动指令带动生态浮岛8驶往目标水域,以降低目标水域内的氮磷含量。
[0127]
工作原理:
[0128]
对于存在富营养化现象的待净化水域,先将待净化水域划分成若干子水域,在每个子水域中均配置有至少一生态浮岛8,位于生态浮岛8的鱼网组件83的外侧壁上的第一检测模块1对鱼网组件83周围的水体中的氮磷含量进行检测,并生成第一检测结果;同时位于生态浮岛8的配重净化组件的外侧壁上的第二检测模块2对配重净化组件周围的子水域中的氮磷含量进行检测,并生成第二检测结果;处理模块3可以为单片机芯片,处理模块3将第一检测结果和第二检测结果输入富营养化分析公式中,处理得到该目标水域的水体富营养化程度值,并将该子水域标记为目标水域。处理模块3将目标水域的水体富营养程度值发送至远程监控模块4,远程监控模块4根据水体富营养程度值生成相应的驱动指令,并下发给与目标水域相邻的子水域内的驱动模块5,使得驱动模块5驱动生态浮岛8驶往目标水域,通过生态浮岛8降低该目标水域内的氮磷含量。
[0129]
以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1