一种建筑楼体内通风管道自动清洁装置的制作方法
1.本发明涉及通风管道清洁技术领域,特别涉及一种建筑楼体内通风管道自动清洁装置。
背景技术:
2.建筑指人工建筑而成的资产,属于固定资产范畴,包括房屋和构筑物两大类。房屋是指供人居住、工作、学习、生产、经营、娱乐、储藏物品以及进行其他社会活动的工程建筑。与建筑物有区别的是构筑物,构筑物指房屋以外的工程建筑,如围墙、道路、水坝、水井、隧道、水塔、桥梁和烟囱等。
3.现在的建筑楼体中会设置有中央空调,中央空调系统由一个或多个冷热源系统和多个空气调节系统组成,该系统不同于传统冷剂式空调(如单体机,vrv) 集中处理空气以达到舒适要求,采用液体气化制冷的原理为空气调节系统提供所需冷量,用以抵消室内环境的热负荷;制热系统为空气调节系统提供所需热量,用以抵消室内环境冷暖负荷,中央空调在运行时,常采用通风管道进行通风,中央空调的通风管道是经先进的机械一次性生产而成的新型管道,以金属材料为主,包括镀锌板、不锈钢、铜、铝等材料制成,主要用于空调行业通风系统中。
4.但是由于中央空调的通风管道常年得不到清洁,使得通风管道内的杂质较多,不利于空气的流通,且造成了空气质量较差的问题,因此,急需一种建筑楼体内通风管道自动清洁装置来解决上述问题。
技术实现要素:
5.本发明的目的在于提供一种建筑楼体内通风管道自动清洁装置,通过旋转的杂质清理刮片可对通风管道内壁上残留的杂质进行刮除,且刮除的杂质在负压的作用下通过杂质进入口进入杂质清理刮片内且落至集杂质仓内收集,通过在通风管道内设置的爬行机器人可对通风管道进行自动的清洁,大大的提高了清洁效率,且利于空气的流通,不会造成空气质量较差的问题,其适用范围广,可满足不同情况下的使用需求,以解决上述背景技术中提出的问题。
6.为实现上述目的,本发明提供如下技术方案:一种建筑楼体内通风管道自动清洁装置,包括爬行机器人,所述爬行机器人上设置有顶升对位机构,所述顶升对位机构上安装有通风管道自动清洁机构,所述通风管道自动清洁机构自动清洁通风管道。
7.进一步地,所述爬行机器人包括爬行基座、前驱动轴、前驱动爬行轮、后驱动轴、后驱动爬行轮和爬行轮牵引传动组件,所述爬行基座的前端设置有前驱动轴,所述前驱动轴的两端均通过轴承安装在爬行基座上且前驱动轴的两端均安装有前驱动爬行轮,所述爬行基座的后端设置有后驱动轴,所述后驱动轴的两端均通过轴承安装在爬行基座上且后驱动轴的两端均安装有后驱动爬行轮,所述前驱动轴和后驱动轴通过爬行轮牵引传动组件牵引
传动。
8.进一步地,所述爬行轮牵引传动组件包括第一驱动电机、双槽皮带轮、第一单槽皮带轮、第二单槽皮带轮、第一牵引传送皮带和第二牵引传送皮带,所述第一驱动电机嵌在爬行基座的侧面上,所述第一驱动电机的输出轴通过花键安装有双槽皮带轮,所述双槽皮带轮通过第一牵引传送皮带与第一单槽皮带轮连接,所述第一单槽皮带轮通过花键安装在前驱动轴上,所述双槽皮带轮还通过第二牵引传送皮带与第二单槽皮带轮连接,所述第二单槽皮带轮通过花键安装在后驱动轴上。
9.进一步地,所述爬行机器人通过第一驱动电机带动前驱动爬行轮和后驱动爬行轮旋转而在通风管道内爬行。
10.进一步地,所述顶升对位机构包括支撑外框架、第二驱动电机、传动丝杆、升降支撑滑板、条形支撑连杆、移位液压缸和高清摄像头,所述支撑外框架安装在爬行基座上,所述支撑外框架的顶部安装有第二驱动电机,所述第二驱动电机的输出轴通过联轴器与传动丝杆连接,所述传动丝杆的下端通过轴承安装在支撑外框架的内侧端面上,所述传动丝杆螺纹连接有升降支撑滑板,所述升降支撑滑板上安装有平行排列的条形支撑连杆,所述条形支撑连杆的上端贯穿支撑外框架且延伸至支撑外框架的上方安装有移位液压缸,所述移位液压缸的活塞杆连接有通风管道自动清洁机构,所述移位液压缸上安装有高清摄像头,所述高清摄像头拍摄通风管道内画面。
11.进一步地,所述通风管道自动清洁机构包括第三驱动电机、集杂质仓、杂质清理刮片、刮片安装座和吸尘风机,所述第三驱动电机连接在移位液压缸的活塞杆上,所述第三驱动电机的输出轴连接有集杂质仓,所述集杂质仓上安装有刮片安装座,所述刮片安装座上安装有杂质清理刮片,所述集杂质仓的侧面连接有吸尘风机。
12.进一步地,所述杂质清理刮片通过连接机构安装在刮片安装座上,所述连接机构包括条形定位柱、连接基板和环形锁紧块,所述条形定位柱安装在连接基板上,所述条形定位柱贯穿杂质清理刮片和刮片安装座后采用环形锁紧块固定,所述环形锁紧块上一体化连接有手柄,所述环形锁紧块通过手柄在条形定位柱上旋转移动。
13.进一步地,所述集杂质仓上设置有排杂口,所述排杂口上安装有电磁阀。
14.进一步地,所述杂质清理刮片为中空结构,所述杂质清理刮片上开设有杂质进入口,所述杂质清理刮片通过刮片安装座与集杂质仓连通。
15.进一步地,所述集杂质仓与吸尘风机进风口的连接处设置有滤网,所述滤网通过螺栓安装在集杂质仓的内壁上。
16.与现有技术相比,本发明的有益效果是:1、本发明的建筑楼体内通风管道自动清洁装置,爬行机器人包括爬行基座、前驱动轴、前驱动爬行轮、后驱动轴、后驱动爬行轮和爬行轮牵引传动组件,爬行轮牵引传动组件包括第一驱动电机、双槽皮带轮、第一单槽皮带轮、第二单槽皮带轮、第一牵引传送皮带和第二牵引传送皮带,第一驱动电机带动双槽皮带轮旋转使前驱动轴、前驱动爬行轮、后驱动轴和后驱动爬行轮也随之旋转,通过旋转的前驱动爬行轮和后驱动爬行轮可使爬行机器人在通风管道内爬行。
17.2、本发明的建筑楼体内通风管道自动清洁装置,顶升对位机构包括支撑外框架、第二驱动电机、传动丝杆、升降支撑滑板、条形支撑连杆、移位液压缸和高清摄像头,传动丝
杆螺纹连接有升降支撑滑板,升降支撑滑板上安装有支撑连杆,条形支撑连杆的上端贯穿支撑外框架安装有移位液压缸,移位液压缸的活塞杆连接有通风管道自动清洁机构,爬行机器人在通风管道内时,第二驱动电机带动传动丝杆旋转使通风管道自动清洁机构上升,直至通风管道自动清洁机构紧贴通风管道的内壁,此时移位液压缸启动且使通风管道自动清洁机构向前移位,使杂质清理刮片在竖直方向上移位至爬行机器人的外侧,便于通风管道自动清洁机构对通风管道进行自动的清洁。
18.3、本发明的建筑楼体内通风管道自动清洁装置,通风管道自动清洁机构包括第三驱动电机、集杂质仓、杂质清理刮片、刮片安装座和吸尘风机,第三驱动电机连接在移位液压缸的活塞杆上,第三驱动电机的输出轴连接有集杂质仓,集杂质仓上安装有刮片安装座,刮片安装座上安装有杂质清理刮片,集杂质仓的侧面连接有吸尘风机,第三驱动电机带动集杂质仓和杂质清理刮片旋转,通过旋转的杂质清理刮片可对通风管道内壁上残留的杂质进行刮除,同时吸尘风机启动产生负压,使刮除的杂质在负压的作用下通过杂质进入口进入杂质清理刮片内且落至集杂质仓内收集,通过在通风管道内设置的爬行机器人可对通风管道进行自动的清洁,大大的提高了清洁效率,且利于空气的流通,不会造成空气质量较差的问题。
19.4、本发明的建筑楼体内通风管道自动清洁装置,杂质清理刮片通过连接机构安装在刮片安装座上,连接机构包括条形定位柱、连接基板和环形锁紧块,条形定位柱安装在连接基板上,条形定位柱贯穿杂质清理刮片和刮片安装座后采用环形锁紧块固定,通过手柄带动环形锁紧块在条形定位柱上旋转移动,可使杂质清理刮片在刮片安装座上装拆便利,通过更换不同尺寸的杂质清理刮片可对不同尺寸的通风管道进行自动清洁,其适用范围广,可满足不同情况下的使用需求。
附图说明
20.图1为本发明的建筑楼体内通风管道自动清洁装置的示意图;图2为本发明的建筑楼体内通风管道自动清洁装置的分解图;图3为本发明的爬行轮牵引传动组件的示意图;图4为本发明的顶升对位机构上安装通风管道自动清洁机构的示意图;图5为本发明的通风管道自动清洁机构的示意图;图6为本发明的通风管道自动清洁机构的分解图;图7为本发明的杂质清理刮片上设置杂质进入口的示意图;图8为本发明的通风管道自动清洁机构的剖面示意图;图9为本发明的连接机构的分解图。
21.图中:1、爬行机器人;11、爬行基座;12、前驱动轴;13、前驱动爬行轮;14、后驱动轴;15、后驱动爬行轮;16、爬行轮牵引传动组件;161、第一驱动电机;162、双槽皮带轮;163、第一单槽皮带轮;164、第二单槽皮带轮;165、第一牵引传送皮带;166、第二牵引传送皮带;2、顶升对位机构;21、支撑外框架;22、第二驱动电机;23、传动丝杆;24、升降支撑滑板;25、条形支撑连杆;26、移位液压缸;27、高清摄像头;3、通风管道自动清洁机构;31、第三驱动电机;32、集杂质仓;321、排杂口;33、杂质清理刮片;331、杂质进入口;34、刮片安装座;35、吸尘风机;4、连接机构;41、条形定位柱;42、连接基板;43、环形锁紧块;431、手柄;5、滤网。
具体实施方式
22.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
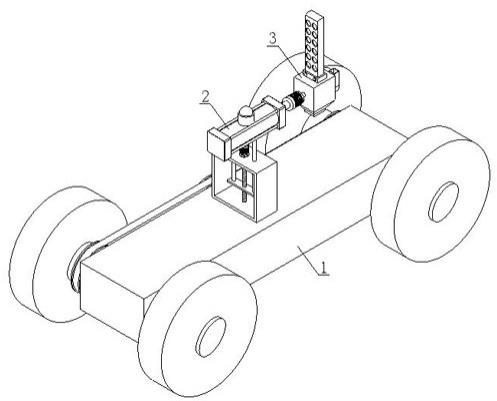
23.参阅图1,一种建筑楼体内通风管道自动清洁装置,包括爬行机器人1,爬行机器人1上设置有顶升对位机构2,通过顶升对位机构2可对通风管道自动清洁机构3进行顶升对位,使通风管道自动清洁机构3可位于通风管道的中心处且使杂质清理刮片33紧贴通风管道的内壁,通过旋转的杂质清理刮片33可对通风管道内壁上残留的杂质进行刮除,顶升对位机构2上安装有通风管道自动清洁机构3,通风管道自动清洁机构3自动清洁通风管道,通过在通风管道内设置的爬行机器人1可对通风管道进行自动的清洁,大大的提高了清洁效率,且利于空气的流通,不会造成空气质量较差的问题。
24.参阅图2,爬行机器人1包括爬行基座11、前驱动轴12、前驱动爬行轮13、后驱动轴14、后驱动爬行轮15和爬行轮牵引传动组件16,爬行基座11的前端设置有前驱动轴12,前驱动轴12的两端均通过轴承安装在爬行基座11上且前驱动轴12的两端均安装有前驱动爬行轮13,爬行基座11的后端设置有后驱动轴14,后驱动轴14的两端均通过轴承安装在爬行基座11上且后驱动轴14的两端均安装有后驱动爬行轮15,前驱动轴12和后驱动轴14通过爬行轮牵引传动组件16牵引传动,通过旋转的前驱动爬行轮13和后驱动爬行轮15可使爬行机器人1在通风管道内爬行。
25.参阅图3,爬行轮牵引传动组件16包括第一驱动电机161、双槽皮带轮162、第一单槽皮带轮163、第二单槽皮带轮164、第一牵引传送皮带165和第二牵引传送皮带166,第一驱动电机161嵌在爬行基座11的侧面上,第一驱动电机161的输出轴通过花键安装有双槽皮带轮162,双槽皮带轮162通过第一牵引传送皮带165与第一单槽皮带轮163连接,第一单槽皮带轮163通过花键安装在前驱动轴12上,双槽皮带轮162还通过第二牵引传送皮带166与第二单槽皮带轮164连接,第二单槽皮带轮164通过花键安装在后驱动轴14上,爬行机器人1通过第一驱动电机161带动前驱动爬行轮13和后驱动爬行轮15旋转而在通风管道内爬行,第一驱动电机161带动双槽皮带轮162旋转,由于双槽皮带轮162通过第一牵引传送皮带165与第一单槽皮带轮163连接且第一单槽皮带轮163通过花键安装在前驱动轴12上,双槽皮带轮162还通过第二牵引传送皮带166与第二单槽皮带轮164连接且第二单槽皮带轮164通过花键安装在后驱动轴14上,因此,双槽皮带轮162在旋转的过程中可带动前驱动轴12、前驱动爬行轮13、后驱动轴14和后驱动爬行轮15也随之旋转,通过旋转的前驱动爬行轮13和后驱动爬行轮15可使爬行机器人1在通风管道内爬行。
26.参阅图4,顶升对位机构2包括支撑外框架21、第二驱动电机22、传动丝杆23、升降支撑滑板24、条形支撑连杆25、移位液压缸26和高清摄像头27,支撑外框架21安装在爬行基座11上,支撑外框架21的顶部安装有第二驱动电机22,第二驱动电机22的输出轴通过联轴器与传动丝杆23连接,传动丝杆23的下端通过轴承安装在支撑外框架21的内侧端面上,传动丝杆23螺纹连接有升降支撑滑板24,第二驱动电机22带动传动丝杆23旋转,传动丝杆23在旋转的过程中可使升降支撑滑板24、条形支撑连杆25、移位液压缸26和高清摄像头27升降,移位液压缸26升降可使通风管道自动清洁机构3也随之升降,升降支撑滑板24上安装有
平行排列的条形支撑连杆25,条形支撑连杆25的上端贯穿支撑外框架21且延伸至支撑外框架21的上方安装有移位液压缸26,移位液压缸26的活塞杆连接有通风管道自动清洁机构3,移位液压缸26上安装有高清摄像头27,高清摄像头27拍摄通风管道内画面,通过高清摄像头27可实时反馈通风管道内的画面,使通风管道自动清洁机构3可顺利移位至通风管道的中心处且使杂质清理刮片33紧贴通风管道的内壁,通过旋转的杂质清理刮片33可对通风管道内壁上残留的杂质进行刮除,爬行机器人1在通风管道内时,第二驱动电机22带动传动丝杆23旋转,传动丝杆23在旋转的过程中可使升降支撑滑板24、条形支撑连杆25、移位液压缸26和高清摄像头27上升,移位液压缸26上升可使通风管道自动清洁机构3也随之上升,直至通风管道自动清洁机构3紧贴通风管道的内壁,此时移位液压缸26启动且使通风管道自动清洁机构3向前移位,使杂质清理刮片33在竖直方向上移位至爬行机器人1的外侧,便于通风管道自动清洁机构3对通风管道进行自动的清洁。
27.参阅图5-图8,通风管道自动清洁机构3包括第三驱动电机31、集杂质仓32、杂质清理刮片33、刮片安装座34和吸尘风机35,第三驱动电机31连接在移位液压缸26的活塞杆上,第三驱动电机31的输出轴连接有集杂质仓32,集杂质仓32上设置有排杂口321,排杂口321上安装有电磁阀,集杂质仓32上安装有刮片安装座34,刮片安装座34上安装有杂质清理刮片33,杂质清理刮片33为中空结构,杂质清理刮片33上开设有杂质进入口331,杂质清理刮片33通过刮片安装座34与集杂质仓32连通,集杂质仓32的侧面连接有吸尘风机35,第三驱动电机31和吸尘风机35均启动,第三驱动电机31带动集杂质仓32和杂质清理刮片33旋转,通过旋转的杂质清理刮片33可对通风管道内壁上残留的杂质进行刮除,同时吸尘风机35启动产生负压,使刮除的杂质在负压的作用下通过杂质进入口331进入杂质清理刮片33内且落至集杂质仓32内收集,通过在通风管道内设置的爬行机器人1可对通风管道进行自动的清洁,大大的提高了清洁效率,且利于空气的流通,不会造成空气质量较差的问题,集杂质仓32与吸尘风机35进风口的连接处设置有滤网5,滤网5通过螺栓安装在集杂质仓32的内壁上,杂质落入集杂质仓32内后,通过滤网5可对杂质进行阻挡,避免杂质在负压作用下进入吸尘风机35内而损坏吸尘风机35。
28.参阅图9,杂质清理刮片33通过连接机构4安装在刮片安装座34上,连接机构4包括条形定位柱41、连接基板42和环形锁紧块43,条形定位柱41安装在连接基板42上,条形定位柱41贯穿杂质清理刮片33和刮片安装座34后采用环形锁紧块43固定,环形锁紧块43上一体化连接有手柄431,环形锁紧块43通过手柄431在条形定位柱41上旋转移动,通过手柄431带动环形锁紧块43在条形定位柱41上旋转移动,可使杂质清理刮片33在刮片安装座34上装拆便利,通过更换不同尺寸的杂质清理刮片33可对不同尺寸的通风管道进行自动清洁,其适用范围广,可满足不同情况下的使用需求。
29.工作原理:第一驱动电机161带动双槽皮带轮162旋转,由于双槽皮带轮162通过第一牵引传送皮带165与第一单槽皮带轮163连接且第一单槽皮带轮163通过花键安装在前驱动轴12上,双槽皮带轮162还通过第二牵引传送皮带166与第二单槽皮带轮164连接且第二单槽皮带轮164通过花键安装在后驱动轴14上,因此,双槽皮带轮162在旋转的过程中可带动前驱动轴12、前驱动爬行轮13、后驱动轴14和后驱动爬行轮15也随之旋转,通过旋转的前驱动爬行轮13和后驱动爬行轮15可使爬行机器人1在通风管道内爬行,爬行机器人1在通风管道内时,第二驱动电机22带动传动丝杆23旋转,传动丝杆23在旋转的过程中可使升降支
撑滑板24、条形支撑连杆25、移位液压缸26和高清摄像头27上升,移位液压缸26上升可使通风管道自动清洁机构3也随之上升,直至通风管道自动清洁机构3紧贴通风管道的内壁,此时移位液压缸26启动且使通风管道自动清洁机构3向前移位,使杂质清理刮片33在竖直方向上移位至爬行机器人1的外侧,与此同时第三驱动电机31和吸尘风机35均启动,第三驱动电机31带动集杂质仓32和杂质清理刮片33旋转,通过旋转的杂质清理刮片33可对通风管道内壁上残留的杂质进行刮除,同时吸尘风机35启动产生负压,使刮除的杂质在负压的作用下通过杂质进入口331进入杂质清理刮片33内且落至集杂质仓32内收集,通过在通风管道内设置的爬行机器人1可对通风管道进行自动的清洁,大大的提高了清洁效率,且利于空气的流通,不会造成空气质量较差的问题。
30.综上所述,本发明的建筑楼体内通风管道自动清洁装置,第一驱动电机161带动双槽皮带轮162旋转使前驱动轴12、前驱动爬行轮13、后驱动轴14和后驱动爬行轮15也随之旋转,通过旋转的前驱动爬行轮13和后驱动爬行轮15可使爬行机器人1在通风管道内爬行,爬行机器人1在通风管道内时,第二驱动电机22带动传动丝杆23旋转使通风管道自动清洁机构3上升,直至通风管道自动清洁机构3紧贴通风管道的内壁,此时移位液压缸26启动且使通风管道自动清洁机构3向前移位,使杂质清理刮片33在竖直方向上移位至爬行机器人1的外侧,便于通风管道自动清洁机构3对通风管道进行自动的清洁,第三驱动电机31带动集杂质仓32和杂质清理刮片33旋转,通过旋转的杂质清理刮片33可对通风管道内壁上残留的杂质进行刮除,同时吸尘风机35启动产生负压,使刮除的杂质在负压的作用下通过杂质进入口331进入杂质清理刮片33内且落至集杂质仓32内收集,通过在通风管道内设置的爬行机器人1可对通风管道进行自动的清洁,大大的提高了清洁效率,且利于空气的流通,不会造成空气质量较差的问题,通过手柄431带动环形锁紧块43在条形定位柱41上旋转移动,可使杂质清理刮片33在刮片安装座34上装拆便利,通过更换不同尺寸的杂质清理刮片33可对不同尺寸的通风管道进行自动清洁,其适用范围广,可满足不同情况下的使用需求。以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明披露的技术范围内,根据本发00明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1