适用于大型筒段多余物清洗的滚动翻转台的制作方法
1.本发明涉及筒段清洗技术领域,具体涉及一种适用于大型筒段多余物清洗的滚动翻转台。
背景技术:
2.在航天行业中,推进剂和氧化剂都存储在大型的筒段内。筒段内部结构容易残留各类化学物,若清理不到位或者不及时,会对加注的胼类燃料的化学性能产生不利影响,因此需要定期对大型筒段内的多余物进行有效清洗。
3.现有的筒段清洗装置,在实现大角度俯仰时,齿轮传动装置结构不够紧凑,占用空间尺寸较大。此外,在吊运安装大型筒段时,对中性较差造成安装过程耗时较久。针对筒段多余物清理自动化程度低,筒段多余物清理操作复杂,不具备定期频繁清洗的条件。因此考虑一种新型大型筒段筒段多余物清洗装置,提升现有筒段多余物清理的自动化水平,使得吊运安装过程更加安全、便捷、可靠。
技术实现要素:
4.本发明的目的在于提供一种适用于大型筒段多余物清洗的滚动翻转台,可实现大型筒段的夹持、翻转与滚动,通过反复滚动灌洗,实现多余物的清理;本装置为筒段吊运、安装提供导向定位,适用于不同长度规格的筒段,极大提高多余物清洗的自动化水平,保证了吊运、安装过程的安全性、便捷性。
5.实现本发明目的的技术解决方案为:一种适用于大型筒段多余物清洗的滚动翻转台,包括支承及滚转机构和俯仰机构;
6.所述支承及滚转机构包括滚转基座、卡环、转接环、滚转环、滚转电动推杆、大齿轮、小齿轮、蜗轮蜗杆减速机、伺服电机、电磁离合器、铰支座、减速机支架、锁扣、滚转支座和滚轮;所述转接环分别与筒段前后两个端面连接固定,前后滚转环分别与前后转接环固定,所述大齿轮与前面的滚转环连接固定;以上整体安装在滚转基座上,两个滚转环安装位置分别对应滚转基座前后两个半圆形鞍座;两个卡环与滚转基座以铰链形式安装,卡环与滚转基座铰链安装端设有滚动电动推杆,滚动电动推杆另一端安装在铰支座上,铰支座与滚转基座连接固定,卡环的回转运动通过滚转电动推杆驱动;锁扣分别安装在卡环和滚转基座上,当支承及滚转机构工作时,保证锁扣处于锁紧状态;蜗轮蜗杆减速机安装在减速机支架上,减速机支架连接固定在滚转基座上,方位伺服电机安装在蜗轮蜗杆减速机输入端,小齿轮安装在蜗轮蜗杆减速机输出端,伺服电机经过蜗轮蜗杆减速机减速增力后驱动小齿轮带动大齿轮转动,从而带动滚转环、转接环和筒段负载一起转动;滚转基座及卡环沿环形方向对称布置有多组滚轮,对筒段整体进行支撑并与滚转环相对滚动;小齿轮与蜗轮蜗杆减速机输出轴之间布置有电磁离合器,在筒段未安装到位时,电磁离合器处于断电分离状态,当安装到位后电磁离合器通电吸合;两个滚转支座分别安装在滚转基座台面上方的两端,垂直于滚转轴线的方向;
7.所述俯仰机构包括俯仰基座、俯仰轴、翻转连杆、俯仰电动推杆、俯仰伺服电机和机械限位柱;俯仰轴穿过翻转连杆、俯仰基座后与滚转支座连接,俯仰轴与翻转连杆、俯仰基座与滚转支座均通过双键传递扭矩,俯仰基座提供俯仰轴的支撑,之间装有一对圆柱滚子轴承;俯仰机构通过两套俯仰电动推杆驱动翻转连杆、滚转支座运动,从而带动支承及滚转机构的滚转基座实现翻转运动。
8.与现有技术相比,本发明的有益效果在于:
9.(1)本发明所设计的大型筒段清洗装置可以实现适用于不同规格的筒段,具有一定通用性;(2)滚转基座及卡环沿环形方向对称布置有多组滚轮,对筒段整体进行支撑并与筒段过渡环相对滚动,减小滚转摩擦阻力,滚轮两侧端面带有锥度,便于清洗前吊装时的定位,且能在翻转任意角度时提供可靠支撑;(3)通过两套电动推杆驱动转盘实现翻转运动,俯仰空间尺寸占用较小,两套电动推杆在转盘上的作用点呈90
°
布置,防止两者同时出现运动死点,能保证在运动任意位置机械自锁,确保运行安全。
附图说明
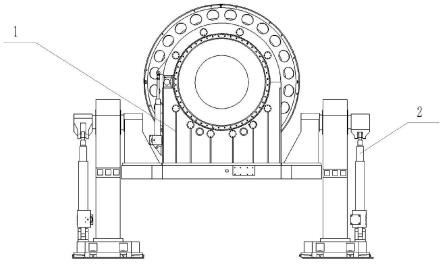
10.图1为本发明一种适用于大型筒段多余物清洗的滚动翻转台的主视图。
11.图2为本发明支承及滚转机构的主视图。
12.图3为本发明支承及滚转机构的后视图。
13.图4为本发明俯仰机构的主视图。
14.图5为本发明俯仰机构的左视图。
15.其中,1支承及滚转机构、2俯仰机构、1-1滚转基座、1-2卡环、1-3转接环、1-4滚转环、1-5滚转电动推杆、1-6大齿轮、1-7小齿轮、1-8蜗轮蜗杆减速机、1-9方位伺服电机、1-10电磁离合器、1-11铰支座、1-12减速机支架、1-13锁扣、1-14滚转支座、1-15滚轮、2-1俯仰基座、2-2俯仰轴、2-3翻转连杆、2-4俯仰电动推杆、2-5俯仰伺服电机、2-6机械限位柱、2-7键、2-8圆柱滚子轴承。
具体实施方式
16.下面结合附图,对本发明的具体实施方式进行详细介绍。
17.如图1所示,一种适用于大型筒段多余物清洗的滚动翻转台,包括支承及滚转机构1、俯仰机构2。
18.如图2、图3所示,所述支承及滚转机构1包括滚转基座1-1、卡环1-2、转接环1-3、滚转环1-4、滚转电动推杆1-5、大齿轮1-6、小齿轮1-7、蜗轮蜗杆减速机1-8、伺服电机1-9、电磁离合器1-10、铰支座1-11、减速机支架1-12、锁扣1-13、滚转支座1-14、滚轮1-15。所述转接环1-3分别与筒段前后两个端面螺接固定,所述前后滚转环1-4分别与前后转接环1-3螺接固定,所述大齿轮1-6与前滚环1-4连接固定;以上整体安装在滚转基座1-1上,两个滚转环1-3安装位置分别对应滚转基座1-1前后两个半圆形鞍座;两个卡环1-2与滚转基座1-1以铰链形式安装,卡环1-2与滚转基座1-1铰链安装端设有滚动电动推杆1-5,滚动电动推杆另一端安装在铰支座1-11上,铰支座1-11与滚转基座1-1螺接固定,卡环1-2的回转运动通过滚转电动推杆1-5驱动,可实现0~100
°
范围的回转;锁扣1-13分别安装在卡环1-2和滚转基座1-1上,当滚转机构1工作时,保证锁扣1-13处于锁紧状态;蜗轮蜗杆减速机1-8安装在减
速机支架1-12上,减速机支架1-12螺接固定在滚转基座1-1上,伺服电机安装在蜗轮蜗杆减速机1-8输入端,小齿轮1-7安装在蜗轮蜗杆减速机1-8输出端,伺服电机1-9经过蜗轮蜗杆减速机1-8减速增力后驱动小齿轮1-7带动大齿轮1-6转动,从而带动滚转环1-4、转接环1-3和筒段负载一起转动。滚转基座1-1及卡环1-2沿环形方向对称布置有多组滚轮1-15,对筒段整体进行支撑并与滚转环1-4相对滚动,减小滚转摩擦阻力,滚轮1-15两侧端面带有锥度,便于清洗前吊装时的定位,且能在翻转任意角度时可靠支撑。小齿轮1-7与蜗轮蜗杆减速机1-8输出轴之间布置有电磁离合器1-10,在筒段未安装到位时,电磁离合器1-10处于断电分离状态,当安装到位后电磁离合器1-10通电吸合;两个滚转支座1-14分别安装在滚转基座1-1台面上方的两端,垂直于滚转轴线的方向。
19.如图4、图5所示,所述俯仰机构2包括俯仰基座2-1、俯仰轴2-2、翻转连杆2-3、俯仰电动推杆2-4、俯仰伺服电机2-5、机械限位柱6。俯仰轴2-2穿过翻转连杆2-3、俯仰基座2-1后与滚转支座1-14连接,俯仰轴2-2与翻转连杆2-3、俯仰基座2-1与滚转支座1-14均通过双键2-7传递扭矩,俯仰基座2-1提供俯仰轴2-2的支撑,之间装有一对圆柱滚子轴承2-8,能承受较大的径向力。俯仰机构2通过两套俯仰电动推杆2-4驱动翻转连杆2-3、滚转支座2-1运动,从而带动滚转机构1的滚转基座1-1实现翻转运动,两套俯仰电动推杆2-4在翻转连杆上的作用点呈90
°
布置,防止两者同时出现运动死点,能保证在运动任意位置机械自锁,确保运行安全。此外还在极限位置处分别设置有接近开关和机械限位柱,防止飞车造成事故。
20.所述一种大型筒段筒段多余物清洗装置可实现大型筒段的夹持、翻转与滚动,通过反复滚动灌洗,实现多余物的清理。本装置为筒段吊运、安装提供导向定位,适用于不同长度规格的筒段,极大提高多余物清洗的自动化水平,保证了吊运、安装过程的安全性、便捷性。
21.现以具体应用本发明的一种适用于大型筒段多余物清洗的滚动翻转台时的使用场合进行详述。
22.滚转机构1位于水平位置,通过驱动滚转电动推杆1-5收缩,卡环1-2处于全张开位置,此时小齿轮1-7与电磁离合器1-10处于断电分离状态。将某一筒段与转接环1-3、滚转环1-4、大齿轮1-6通过螺钉固定;起吊筒段负载移动至转台上方,目测大致对中;筒段缓慢下降,当大齿轮1-6靠近小齿轮1-7时,目测它们端面是否重合且大齿轮1-6与两个小齿轮1-7的距离是否相同,如有不同将筒段位置进行调整;筒段调整后继续下降,此时小齿轮1-7与大齿轮1-6接触进行随动同时提供导向;筒段下落至与滚轮1-15侧面接触,即可自动导向直至完全落下;通过滚转电动推杆1-5伸长,使得卡环1-2运动闭合;锁扣1-13将卡环1-2与滚转基座1-1固定,此时滚转电动推杆1-5断电。
23.控制小齿轮1-7与电磁离合器1-10处于吸合状态,控制伺服电机1-9转动,伺服电机1-9经过蜗轮蜗杆减速机1-8减速增力后驱动小齿轮1-7带动大齿轮1-6转动,从而带动滚转环1-4、转接环1-3和筒段一起转动。由于蜗轮蜗杆减速机1-8具有机械自锁功能,可以实现滚转机构1在停留在任意角度。
24.控制两套俯仰电动推杆2-4伸长或缩短,来驱动滚转机构1的滚转基座1-1实现翻转运动,两套俯仰电动推杆2-4在翻转连杆上的作用点呈90
°
布置,防止两者同时出现运动死点,能保证在运动任意位置机械自锁,确保运行安全。
25.综上所述,本发明的一种适用于大型筒段多余物清洗的滚动翻转台针对不同规格
的大型筒段可以实现滚转和俯仰两个自由度运动,从而实现筒段内多余物的有效清除,其结构设计合理可靠、便于吊运和安装,俯仰空间尺寸占用较小,极大提高了吊装操作的效率。
26.上述仅为本发明的主要特征、工作原理和优点等,对于本领域的技术人员来说,本发明并不受上述实施例的限制,在不违背其基本原理的前提下,针对不同的实施例本发明可以进行灵活的更改和变化,这些更改和变化如在本发明的精神和范围之内,均应落入本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1