一种基于脉冲光纤激光器的钛种板无接触智能清洗机组的制作方法
1.本发明涉及冶金机械设备技术领域,特别涉及一种基于脉冲光纤激光器的钛种板无接触智能清洗机组。
背景技术:
2.目前冶金行业中,钛种板清洗方式大部分为人工手动打磨清洗,而传统的人工打磨方式去除钛种板上覆盖的氧化层和电解液结晶等污染物存在以下缺点:机械打磨对钛种板基材损伤较大,人工每次打磨效果差异较大,打磨后的钛种板质量不稳定;打磨会产生飞溅火星和油渍,工作环境较差,存在安全隐患;工人需要长时间弯腰搬动和打磨钛种板,劳动强度较大;打磨前需要拆除夹边条,打磨后又需要重新安装,降低了夹边条使用寿命;人工打磨不便于实现电解车间的智能化转型。因此急需一种替代人工打磨方式的无接触智能清洗机组,完成对钛种板的全过程无接触、无损伤、智能化、高效率的智能清洗。
技术实现要素:
3.本发明的目的是提供一种基于脉冲光纤激光器的钛种板无接触智能清洗机组,以解决使用传统人工手动打磨清洗方式损伤钛种板,工作环境差、存在安全隐患,降低夹边条使用寿命,劳动强度大、效率低下等缺点。
4.为解决上述技术问题,本发明所采取的技术方案为:一种基于脉冲光纤激光器的钛种板无接触智能清洗机组,包括水平设置的上板输送机,上板输送机的尾端连接在由防护栏四面围合而成的钛种板清洗平台的左端,清洗平台上一侧设有取板机器人、另一侧设有激光清洗机器人,取板机器人包括机械臂和法兰连接在机械臂上的取板夹爪,取板夹爪包括横梁,横梁的上侧一端设有电磁阀、另一端设有气缸、中间设有连接法兰,横梁下侧两端分别通过连杆连接有夹爪,夹爪抓取在钛种板的两侧;清洗平台底部通过地脚固定、右端连接在排板输送机的始端,排板输送机的侧边设有激光清洗机、尾端连接有过路坡架,过路坡架上连接有控制柜支架。
5.优选的,所述上板输送机包括机架,机架的上端设有输送装置,输送装置的尾端设有动力装置;所述输送装置包括设置在机架前后两侧的数组输送链条,每组输送链条的左右两端分别设有输送链轮、底部设有输送链条导轨,输送链条的外侧分别设有导向板、首端分别通过输送链轮连接有输送链条张紧机构和传动轴、尾端分别通过输送链轮连接有带座轴承,带座轴承连接在动力链轮上,动力链轮通过动力链条与设置在机架底部的伺服电机减速机和动力链条张紧机构相连,前后两端的动力链条张紧机构之间连接有传动主轴。
6.优选的,所述输送链条分为数段,每段输送链条包括内链板和外链板,内链板和外链板的首端和尾端分别连接有首端销轴和尾端销轴,首端销轴外侧套装有轴套,轴套外侧套装有聚四氟乙烯套;尾端销轴上还连接有设置在链板外侧的异型链板,异型链板的顶部两端加工为楔形。
7.优选的,所述清洗平台下方设有电缆桥架,清洗平台上方中间设有位于钛种板正
下方的辅助定位装置,辅助定位装置上设有真空吸盘。
8.优选的,所述控制柜支架上设有总控制柜和悬臂箱。
9.本发明的使用过程为:本发明机组工作时,通过天车吊装一组钛种板置于上板输送机上,导向板和异型链板的导向使钛种板能准确放置在输送链条相应输送槽内,输送链条向左移动半个节距后向右移动,当有钛种板到达取板工位时,上板输送机上传感器感应到信号,上板输送机停止运行,钛种板通过取板机器人的取板夹爪转运到清洗工位,激光清洗机器人驱使激光头移动,对钛种板清洗面中第一个面及左侧触点进行清洗,然后取板机器人第四轴旋转180
°
,激光清洗机器人重复上述动作完成钛种板第二面和右侧触点的清洗,取板机器人将完成清洗的钛种板放在排板输送机的放置位上(排板输送机通过传感器检测放置位是否为空,若不是,则向右移动一个输送链条的节距),此时完成一片钛种板的清洗,重复此过程完成整组钛种板的清洗(当某一钛种板清洗完毕且上板输送机上的对射传感器检测上板输送机上无钛种板时表示一组钛种板已清洗完成)。当一组钛种板排板完成后,由天车将整组清洗完毕的钛种板吊到后续工序位。
10.本发明的有益效果为:(1)与现有人工打磨相比,本发明机组采用激光无接触清洗,不伤基材,整板清洗效果一致,每片钛种板清洗质量一致;清洗过程做到无人化,绿色环保,无需拆卸塑料夹边条;清洗过程智能可控,提高了工作效率。
11.(2)本发明机组中的激光清洗机器人能准确控制激光的清洗区域,确保不会误清洗到不需清洗的区域。
12.(3)本发明机组中的取板机器人专用夹爪通过plc采用双压力控制,能准确牢靠的抓取钛种板,并使钛种板在夹爪上位置一致。
附图说明
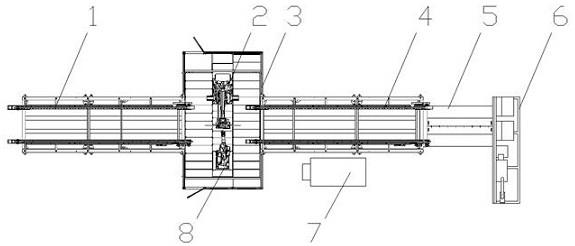
13.图1是本发明的俯视图;图2是图1中本发明的左视图;图3是图2中钛种板结构示意图;图4是图1中上板输送机主视图;图5是图4中上板输送机俯视图;图6是图4中上板输送机左视图;图7是图4中每段输送链条结构示意图;图8是图7中每段输送链条仰视图;图9是图2中取板夹爪结构示意图;图10是图9中取板夹爪右视图。
14.图中:1、上板输送机,1-1、输送链条,1-1-1滚轮,1-1-2异型链板,1-1-3首端销轴,1-1-4轴套,1-1-5聚四氟乙烯套,1-1-6、尾端销轴,1-2、输送链轮,1-3、动力链条,1-4、动力链条张紧机构,1-5、伺服电机减速机,1-6、机架,1-7、导向板,1-8、防护罩,1-9、传动主轴,1-10、带座轴承,1-11、动力链轮,1-12、抓取导向定位板,1-13、传动轴,1-14、输送链条张紧机构,1-15、输送链条导轨,1-16、输送链条托轨,1-17、托轨支撑,2、取板机器人,3、防护栏,
4、排板输送机,5、过路坡架,6、控制柜支架,7、激光清洗机,8、激光清洗机器人,9、取板夹爪,9-1、横梁,9-2、电磁阀,9-3、连接法兰,9-4、气缸,9-5、连杆机构,9-6、夹爪,10、钛种板,11、总控制柜,12、悬臂箱,13、电缆桥架,14、辅助定位装置,15、地脚,16、地基基础板,17、钛种板清洗面,18、夹边条。
具体实施方式
15.下面结合附图对本发明作进一步详细的说明。
16.如图1-10所示的一种基于脉冲光纤激光器的钛种板无接触智能清洗机组,包括一种基于脉冲光纤激光器的钛种板无接触智能清洗机组,包括水平设置的上板输送机1,上板输送机1的尾端连接在由防护栏3四面围合而成的钛种板清洗平台的左端,清洗平台上一侧设有取板机器人2、另一侧设有激光清洗机器人8,取板机器人2包括机械臂和法兰连接在机械臂上的取板夹爪9,取板夹爪9包括横梁9-1,横梁9-1的上侧一端设有电磁阀9-2、另一端设有气缸9-4、中间设有连接法兰9-3,横梁9-1下侧两端分别通过连杆9-5连接有夹爪9-6,夹爪9-6抓取在钛种板10的两侧;清洗平台底部通过地脚15固定、右端连接在排板输送机4的始端,排板输送机4的侧边设有激光清洗机7、尾端连接有过路坡架5,过路坡架5上连接有控制柜支架6,控制柜支架6上设有总控制柜11和悬臂箱12;清洗平台下方设有电缆桥架13,清洗平台上方中间设有位于钛种板10正下方的辅助定位装置14,辅助定位装置14上设有真空吸盘。
17.上板输送机1包括机架1-6,机架1-6的上端设有输送装置,输送装置的尾端设有动力装置;所述输送装置包括设置在机架1-6前后两侧的数组输送链条1-1,每组输送链条1-1的左右两端分别设有输送链轮1-2、底部设有输送链条导轨1-15,输送链条1-1的外侧分别设有导向板1-7、首端分别通过输送链轮1-2连接有输送链条张紧机构1-14和传动轴1-13、尾端分别通过输送链轮1-2连接有带座轴承1-10,带座轴承1-10连接在动力链轮1-11上,动力链轮1-11通过动力链条1-3与设置在机架1-6底部的伺服电机减速机1-5和动力链条张紧机构1-4相连,前后两端的动力链条张紧机构1-4之间连接有传动主轴1-9。
18.输送链条1-1分为数段,每段输送链条1-1包括内链板和外链板,内链板和外链板的首端和尾端分别连接有首端销轴1-1-3和尾端销轴1-1-6,首端销轴1-1-3外侧套装有轴套1-1-4,轴套1-1-4外侧套装有聚四氟乙烯套1-1-5;尾端销轴1-1-6上还连接有设置在链板外侧的异型链板1-1-2,异型链板1-1-2的顶部两端加工为楔形。
19.本发明的使用过程:本发明机组工作时,通过天车吊装一组钛种板置于上板输送机1上,导向板1-7和异型链板1-1-2的导向使钛种板能准确放置在输送链条1-1相应输送槽内,输送链条1-1向左移动半个节距后向右移动,当有钛种板10到达取板工位时,上板输送机1上传感器感应到信号,上板输送机1停止运行,钛种板10通过取板机器人2的取板夹爪9转运到清洗工位,激光清洗机器人8驱使激光头移动,对钛种板清洗面17中第一个面及左侧触点进行清洗,然后取板机器人2第四轴旋转180
°
,激光清洗机器人8重复上述动作完成钛种板第二面和右侧触点的清洗,取板机器人2将完成清洗的钛种板10放在排板输送机4的放置位上(排板输送机4通过传感器检测放置位是否为空,若不是,则向右移动一个输送链条1-1的节距),此时完成一片钛种板10的清洗,重复此过程完成整组钛种板10的清洗(当某一钛种板10清洗完毕且
上板输送机1上的对射传感器检测上板输送机1上无钛种板10时表示一组钛种板10已清洗完成)。当一组钛种板10排板完成后,由天车将整组清洗完毕的钛种板10吊到后续工序位。
20.本发明与现有人工打磨相比,本发明机组采用激光无接触清洗,不伤基材,整板清洗效果一致,每片钛种板清洗质量一致;清洗过程做到无人化,绿色环保,无需拆卸塑料夹边条;清洗过程智能可控,提高了工作效率;本发明机组中的激光清洗机器人能准确控制激光的清洗区域,确保不会误清洗到不需清洗的区域;取板机器人专用夹爪通过plc采用双压力控制,能准确牢靠的抓取钛种板,并使钛种板在夹爪上位置一致。
21.以上的仅是本发明的优选实例。应当指出对于本领域的普通技术人员来说,在本发明所提供的技术启示下,作为机械领域的公知常识,还可以做出其它等同变型和改进,也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1