一种管道清洁机器人
1.本发明属于管道清理技术领域,具体涉及一种管道清洁机器人。
背景技术:
2.随着城市化进程的不断推近、城市人口的持续增加,地下管道的使用逐渐增多。管道运输因其较高的实用性与经济性广泛应用在生活水暖供应、石油运输、天然气输送等各行各业的公共设施中。利用管道传输的液体中携带杂质,对管道未及时清理,长期下来管道中会出现杂质积聚现象,使沉积物逐渐累积,严重时甚至造成阻塞,导致出现输运系统损坏及物质泄漏等事故。基于这一情况,日常管道排水,通畅则显得尤为重要。主管道直径大小可以清理,需要解决的是支管道网的清理工作,支管道的直径较小,人工或者清理工具难以进入,而且为无压力管道,管道内壁容易淤积泥沙,严重影响管道的排水功能。
3.传统的人工清理方式,耗费资金投入巨大,经济效益低;如今现有的管道清理机器人仍有一定的缺陷,多数机器人仅能针对特定大小的管道,无法对多数管道形成适应;其次对管道壁的贴合不稳定,使作业过程中发生打滑等不良现象,适应性差;同时,有相当一部分的管道机器人无法实现在管道中拐弯转向等功能。而且不能够进行便捷的拼接组装,也不方便工作人员对装置进行拆卸检修,并且装置在管道内部的整体稳定性较差。
技术实现要素:
4.本发明的目的是提供一种管道清洁机器人,解决现有管道清理机器人难以适应不同直径管道以及爬行时与管道臂贴合不稳定的问题。
5.为了达到上述目的,本发明所采用的技术方案是:一种管道清洁机器人,包括履带驱动机构,履带驱动机构的前端设置有第一万向球,第一万向球内可转动地设置有钻头清理机构,履带式驱动机构的后端设置有第二万向球,第二万向球内可转动地设置有内壁刷洗机构。
6.作为本发明的一种优选的技术方案,履带驱动机构包含多个销轴,多个销轴的下端可转动地设置在下支撑座上,多个销轴的上端螺纹装配有上支撑座,下支撑座上铰接有多对第一连杆,每对第一连杆上铰接有履带架,履带架内装配有多个大齿轮和多个小齿轮,多个大齿轮和小齿轮之间装配有履带,任一大齿轮与第一电机的驱动端传动配合;上支撑座上铰接有多个第二连杆和多个第二电机,第二连杆与对应的履带架铰接在一起上,第二电机的驱动端与对应的销轴连接。
7.作为本发明的一种优选的技术方案,销轴的数量为三,且等角度布置。
8.作为本发明的一种优选的技术方案,多对第一连杆、多个第二连杆的数量均为三,且等角度布置。
9.作为本发明的一种优选的技术方案,头清理机构包含设置在第一万向球上的第三电机,第三电机的驱动端设置有圆台,圆台的外侧沿其径向布置有多个导轨,导轨的最外端设置有第一环形座,每个导轨内均设置有导槽,多个导轨的上侧设置有第二环形座,第二环
形座的侧部铰接有多个摆杆,摆杆的下侧设置有导销,导销布置在对应的导槽中,摆杆的上侧设置有第四电机,第四电机的驱动端设置有钻头。
10.作为本发明的一种优选的技术方案,导轨和摆杆的数量均为六,且等角度布置。
11.作为本发明的一种优选的技术方案,内壁刷洗机构包含设置在第二万向球上的第五电机,第五电机的驱动端设置有基座,基座上铰接有多个第三连杆和多个第四连杆;每个第三连杆的中部均铰接与第五连杆的一端铰接,第五连杆的另一端与滑套相铰接,滑套套设在第五电机的驱动端上,第四连杆的一端与第六连杆的一端相铰接,第六连杆的中部与第三连杆的一端相铰接,第六连杆的另一端设置有刷头,第五电机的驱动端上设置有限位螺母,第五电机的驱动端上套设有弹簧,弹簧位于限位螺母和滑套之间。
12.作为本发明的一种优选的技术方案,第三连杆和第四连杆的数量均为六。
13.本发明的有益效果是:本发明的一种管道清洁机器人,其钻头清理机构对管道壁难以清洁的附着物进行破碎处理,内壁刷洗机构能够对钻头清理过的位置进行二次清洁,清洁效果好且效率高;通过摇杆沿滑轨滑动调节整个钻头清理机构的直径,内壁刷洗机构可根据管道尺寸调节装置的直径,适应对各种直径不同的管道进行清理,可以应用于较小的管道,解决人工无法进入、效率低下、工作量大的问题;传动部分采用履带式的结构,搭配限移动销、缓震器等结构提高其在管道内工作的稳定性。
附图说明
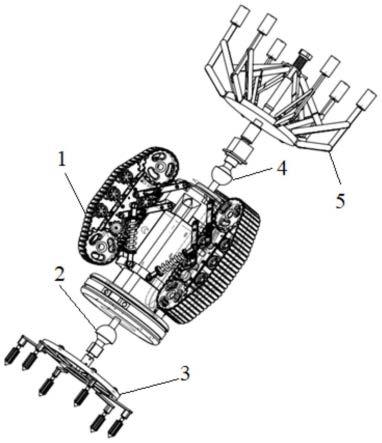
14.图1为本发明的一种管道清洁机器人的结构示意图;
15.图2为本发明的一种管道清洁机器人中履带驱动机构的结构示意图;
16.图3为本发明的一种管道清洁机器人中履带驱动机构的局部放大图;
17.图4为本发明的一种管道清洁机器人中钻头清理机构的示意图;
18.图5为本发明的一种管道清洁机器人中内壁刷洗机构的结构示意图。
19.图中:1.履带驱动机构,101.上支撑座,102.第二电机,103.履带,104. 大齿轮,105.小齿轮,106.履带架,107.第一连杆,108.销轴,109.下支撑座, 110.减震器,111.第二连杆,2.第一万向球,3.钻头清理机构,301.圆台,302. 第四电机,303.第二环形座,304.导轨,305.第一环形座,306.导销,307.摆杆,308.导销,4.第二万向球,5.内壁刷洗机构,501.第五电机,502.基座, 503.滑套,504.限位螺母,505.刷头,506.弹簧,507.第六连杆,508.第四连杆,509.第三连杆,510.第五连杆。
具体实施方式
20.如图1所示,本发明的一种管道清洁机器人,其主体框架为履带驱动机构1,履带驱动机构1采用履带式的结构,位于管道清理机器人中部,通过三个履带沿周向均匀分布提高机器人在管道内工作的稳定性。履带驱动机构 1的前端设置有第一万向球2,第一万向球2内可转动地设置有钻头清理机构3,钻头清理机构3用于对管道壁难以清洁的附着物进行破碎处理。履带式驱动机构1的后端设置有第二万向球4,第二万向球4内可转动地设置有内壁刷洗机构5,内壁刷洗机构5可以实现完全根据管道内径进行自适应调节的功能,对管道内壁更彻底的清理。
21.结合图2和图3,在本发明的一种管道清洁机器人中,履带驱动机构1 包含三个销
轴108,三个销轴108的下端可转动地设置在下支撑座109上,三个销轴108的上端螺纹装配有上支撑座101,下支撑座109上铰接有三对第一连杆107,每对第一连杆107上均铰接有履带架106,履带架106内装配有多个大齿轮104和多个小齿轮105,多个大齿轮104和小齿轮105之间装配有履带103,任一大齿轮104与第一电机的驱动端传动配合;上支撑座 101上铰接有三个第二连杆111和三个第二电机102,第二连杆111与对应的履带架106铰接在一起上,每个第二连杆111上均设置有减震器110,第二电机102的驱动端与对应的销轴108连接。
22.三个履带103沿周向均匀分布提高其在管道内的稳定性;三根销轴108 对整体履带的运动起到一定限制导向作用;上支撑座101上螺纹装配在三根销轴108,基于丝杠传动原理,启动第二电机102在可动范围内上支撑座101 将沿销轴108运动,进而通过第一连杆107、第二连杆111进行张合实现履带103与管道壁贴合的目的;缓震器110套设在第二连杆111上,在运动中起到对上支撑座101以及履带架106的缓冲作用;整个传动装置由履带架 103、两个大链轮104与履带103贴合组成,同时内侧设有两个小链轮105 进行支撑;通过第一电动机对其产生动力;外侧用三个小链轮105起到支撑与传动作用,以便应对管道内部凹凸不平的情况。
23.结合图4,在本发明的一种管道清洁机器人中,头清理机构3包含设置在第一万向球2上的第三电机308,第三电机308的驱动端设置有圆台301,圆台301的外侧沿其径向布置有六个导轨304,导轨304的最外端设置有第一环形座305,每个导轨304内均设置有导槽,六个导轨304的上侧设置有第二环形座303,第二环形座303的侧部铰接有六个摆杆307,摆杆307的下侧设置有导销303,导销303布置在对应的导槽中,摆杆307的上侧设置有第四电机302,第四电机302的驱动端设置有钻头306。
24.第四电机302带动六个钻头306高速转动,第三电机308带动整个钻头组转动,此时摇杆307可沿滑轨304中设置的导槽向内或向外滑动来调节整个钻头组的直径,用于适应不同内径的管道。
25.结合图4,在本发明的一种管道清洁机器人中,内壁刷洗机构5包含设置在第二万向球4上的第五电机501,第五电机501的驱动端设置有基座502,基座502上铰接有六个第三连杆509和六个第四连杆508;每个第三连杆509 的中部均铰接与第五连杆510的一端铰接,第五连杆510的另一端与滑套503 相铰接,滑套503套设在第五电机501的驱动端上,第四连杆508的一端与第六连杆507的一端相铰接,第六连杆507的中部与第三连杆509的一端相铰接,第六连杆507的另一端设置有刷头505,第五电机501的驱动端上设置有限位螺母504,第五电机501的驱动端上套设有弹簧506,弹簧506位于限位螺母504和滑套503之间。
26.当管道内径缩小时,内壁刷洗机构5中的滑套503向上运动并对弹簧506 进行压缩,第三连杆509、第四连杆508、第五连杆510和第六连杆507向内收缩,从而带动整个内壁刷洗机构5直径变小与管道内径相适应。第五电机501启动可带动多个刷头505转动,以便对管道的内壁进行清理。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1